1.本发明涉及强对流天气预警技术领域,尤其涉及基于背景场资料和机器学习的静止轨道卫星对流初生预警方法。
背景技术:
2.美国阿拉巴马大学(university of alabama in huntsville)开发的多光谱的对流初生识别预警算法,用来监测未来两个小时内可能发展成为回波强度≥35dbz强对流系统的发生,目前的版本是v2.0。该算法包括对流体判识、对流体跟踪和多光谱对流初生识别三大部分。主要判据为12条。利用msg资料进行的算法验证结果表明,产品精度为80.75%。goes
‑
r对流初生算法的核心来自satcast(satellite convection analysis and tracking),这是从2002年开始研发的算法,由nasa(national aeronauticas and space administration)、noaa(national ocean and atmospheric administration)和nfs(national science foundation)共同资助,业务应用于美国飞控中心、一些国家天气预报服务部门、goes
‑
r测试平台、航空预报中心和海洋预报中心,目前版本v2.0。
3.美国威斯康辛大学的uwci(university of wisconsin convective initiation)算法(sieglaff,et al,2011)的物理基础是:快速发展的对流因为云顶升高而导致云顶温度下降,因此具有较大的云顶降温率。在技术方法上,该算法提出了块平均(box
‑
average)的概念,利用当前时刻的块平均云顶亮温与前一时刻的块平均亮温差来粗判对流,通过7条判据,进一步剔除因平流、薄卷云等影响的非对流像元,最后符合云顶降温率的像元即对流初生。该算法采用单通道数据和云类型产品作为辅助数据,因此简单、快速和高效,但缺点是在有云水平移动、薄卷云移动和复杂多层云的情况下,会产生误判。
4.国家卫星气象中心基于美国阿拉巴马大学的satcast算法,针对风云四号气象卫星也开发了对流初生预警算法。该算法主要采用了动态阈值的对流初判识、光流与面积重叠方法进行对流体跟踪,以及bp_adaboost机器学习等技术方法,并且目前该算法产品已经进入业务使用。
5.值得指出的是,目前这些对流初生预警方法只采用了红外通道信息,并未引入可见光\近红外的信息。目前国家卫星气象中心业务对流初生产品解决了提前量与命中率问题,但在有云水平移动、薄卷云移动和复杂多层云的情况下,仍然受到干扰会产生虚警。
技术实现要素:
6.本发明的目的在于克服现有技术缺陷,提出了基于背景场资料和机器学习的静止轨道卫星对流初生预警方法。
7.为了实现上述目的,本发明提出了一种基于背景场资料和机器学习的静止轨道卫星对流初生预警方法,所述方法包括:
8.对静止轨道气象卫星连续采集的两帧卫星云图进行预处理;
9.对预处理后的两帧图像分别进行对流快速粗判别得到对应的对流目标;
10.计算预处理后的两帧图像间的光流,根据光流对对流目标进行位置的订正,再采用面积重叠的方法进行判别跟踪,确定对流目标;
11.根据判别跟踪确定的对流目标的多光谱响应,结合数值预报背景场,构造敏感因子;
12.将敏感因子输入预先建立和训练好的基于随机森林方法的对流初生预警模型,得到分类结果,从而实现对流初生预警。
13.作为上述方法的一种改进,所述对静止轨道气象卫星连续采集的两帧卫星云图进行预处理;具体包括:
14.对每帧卫星云图进行通道分离处理,将卫星云图中不同通道的测值分离,每一个通道形成一幅圆盘图;再进行定位,定标以及质量控制处理得到该卫星云图预处理后的图像数据。
15.作为上述方法的一种改进,所述对预处理后的两帧图像分别进行对流快速粗判别得到对应的对流目标;具体包括:对预处理后的每帧图像均进行以下处理:
16.根据10.8μm亮温的云类型阈值选择目标,然后进行图像分割,对连通区域进行连续编号,形成标号图像;
17.对于标号图像,进行尺度检测,剔除小于预设的最小面积阈值的目标,再进行最小峰值检测,使得在目标区内的最小值与周围象元的温差在预设的温差阈值以上,得到检测后的标号图像;
18.对于检测后的标号图像,采用单时刻多光谱阈值法剔除其中的非对流单元,从而得到对流目标。
19.作为上述方法的一种改进,所述计算预处理后的两帧图像间的光流,根据光流对对流目标进行位置的订正,再采用面积重叠的方法进行判别跟踪,确定对流目标;具体包括:
20.计算两帧图像光流,根据光流对对流目标的位置进行订正,订正后计算对流目标前后时刻的重合面积,并结合前一时刻对流目标面积计算比值得到重合率,判断重合率是否大于预设比值,判断为是,则后一帧的对流目标是前一帧的后续目标。
21.作为上述方法的一种改进,所述敏感因子具体包括:
22.10.8μm亮温,用于表示云顶高;
23.10.8
‑
6.2μm亮温差,用于表示云顶相对于上层对流层的高度;
24.10.8
‑
12.0μm亮温差,用于表示分裂窗云顶相态;
25.8.5
‑
10.8μm亮温差,用于表示云顶相态;
26.2*10.8
‑
12.0
‑
8.5μm,用于表示云顶相态;
27.10.8μm亮温时间变化率,用于表示云的抬升;
28.10.8
‑
6.2μm亮温差时间变化率,用于表示云的抬升;
29.10.8
‑
12.0μm亮温差时间变化率,用于表示云顶相态变化;
30.8.5
‑
10.8μm亮温差时间变化率,用于表示云顶冻结变化;
31.0.64μm反照率,用于表示有效粒子半径或光学厚度;
32.0.64与1.6μm通道比值,用于表示云顶相态;
33.bli指数,用于表示对流抬升趋势;和
34.cape对流有效位能,用于表示对流抬升的势能。
35.作为上述方法的一种改进,所述方法还包括对流初生预警模型的训练步骤;具体包括:
36.获取卫星资料、数值预报场背景资料和地基雷达资料建立训练集;
37.将训练集输入基于随机森林方法建立的对流初生预警模型,调整分类树数和预测变量总数,使用袋外数据样本计算估计误差,当估计误差符合预设的阈值要求时,确定预测变量数,得到训练好的对流初生预警模型。
38.作为上述方法的一种改进,所述获取卫星资料、数值预报场背景资料和地基雷达资料建立训练集;具体包括:
39.获取卫星资料、数值预报背景场资料和地基雷达资料建立从对流初生到成熟阶段整个生命史的时间序列数据集;
40.对时间序列数据集进行时空匹配融合处理,确认对流初生发生的位置与时间;当卫星提前于雷达进行对流初生预警时,以卫星识别的对流初生为实际的对流初生;当雷达识别的对流提前于对流初生预警时,对卫星对流观测进行反向跟踪,找到雷达对应的对流单元补充为实际的对流初生;
41.然后再进行反向追踪查询到对流初生触发前的背景条件,由对流触发前的背景条件和时间序列数据集构造案例数据集;
42.结合灾害类型数据与案例数据集进行时空匹配得到标签数据,从而建立训练集。
43.一种基于背景场资料和机器学习的静止轨道卫星对流初生预警系统,所述系统包括:对流初生预警模型、预处理模块、粗判别模块、判别跟踪模块、敏感因子构造模块和对流初生预警输出模块;其中,
44.所述预处理模块,用于对静止轨道气象卫星连续采集的两帧卫星云图进行预处理;
45.所述粗判别模块,用于对预处理后的两帧图像分别进行对流快速粗判别得到对应的对流目标;
46.所述判别跟踪模块,用于计算预处理后的两帧图像间的光流,根据光流对对流目标进行位置的订正,再采用面积重叠的方法进行判别跟踪,确定对流目标;
47.所述敏感因子构造模块,用于根据判别跟踪确定的对流目标的多光谱响应,结合数值预报背景场,构造敏感因子;
48.所述对流初生预警输出模块,用于将敏感因子输入预先建立和训练好的基于随机森林方法的对流初生预警模型,得到分类结果,从而实现对流初生预警。
49.与现有技术相比,本发明的优势在于:
50.本发明在静止轨道气象卫星业务对流初生算法基于红外通道的基础上,引入了数值预报的最佳抬升指数与对流有效位能以及可见光通道资料,能够实现在保证提前于雷达回波35dbz的前提下,对虚假目标进行过滤,从而降低对流初生预警的虚警率。
附图说明
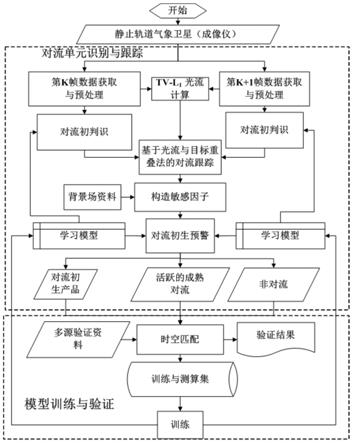
51.图1是本发明的基于背景场资料和机器学习的静止轨道卫星对流初生预警方法总
体框图;
52.图2是根据光流将对流进行位置订正示意图;
53.图3是光流订正之后面积重叠对流跟踪算法,考虑合并、分裂状况;
54.图4是多光谱对流判据敏感性实验与分类数据集制作模型流程图;
55.图5是目标识别、跟踪主体框架以及对流完整时间序列案例数据集构建示意图;
56.图6是基于背景场资料以及机器学习的风云四号对流初生预警技术对流识别的案例,其中,图6(a)是2020年7月6日世界时02:45案例;图6(b)是对流初生预警技术识别结果雷达回波;
57.图7(a)是数值预报背景场中bli对流初生识别正负样本的概率分布图;
58.图7(b)是数值预报背景场中cape对流初生识别正负样本的概率分布图;
59.图8根据数值预报背景场中bli与cape阈值化后对流初生识别结果对比,其中,图8(a)是基于cape阈值化对流初生识别结果,图8(b)是基于bli阈值化对流初生识别结果;图8(c)是未经过bli或cape阈值化后对流初生识别结果;图8(d)是雷达回波累积频数分布图;
60.图9展示了0.64μm与1.6μm反照率强度比分布与对流识别对应的关系,其中,图9(a)是北京时2020年8月10日11:00时0.64μm与1.6μm反照率强度比,图9(b)是北京时2020年8月10日11:00
‑
11:30雷达回波累积分布图;图9(c)是北京时2020年8月10日12:00时0.64μm与1.6μm反照率强度比,图9(d)是北京时2020年8月10日12:00
‑
12:30雷达回波累积分布图。框图中为0.64μm与1.6μm反照率强度比小值,而雷达回波未有反应。
具体实施方式
61.下面结合附图和实施例对本发明的技术方案进行详细的说明。
62.实施例1
63.如图1所示,本发明的实施例1提出了基于背景场资料和机器学习的静止轨道卫星对流初生预警方法。以风云四号气象卫星为例,进行说明。本方法主要由对流单元的初识别与跟踪模块和机器学习模型训练与验证模块两个模块构成。对流单元的初识别与跟踪模块由数据实时获取与预处理、对流初识别、对流跟踪与对流初生预警敏感性因子构造以及机器学习前向模型计算等子模块构成。机器学习模型训练与验证模块由模型训练与验证子模块构成。
64.步骤1)数据预处理
65.数据预处理进行通道分离,定位、定标等文件数据提取,质量检验和容错处理等工作。通道分离是将原始展宽图像数据中不同通道的测值分离开来,每一个通道形成一幅圆盘图,便于在后续计算中数据的反复调用。定位、定标工作的质量对卫星对流云判识的质量有非常大的影响。没有高质量的定位、定标预处理工作,对流云判识的质量是无法保证。
66.步骤2)对流快速粗判别
67.传统的地面系统对流判识算法首先根据10.8μm亮温的云类型阈值选择目标,然后进行图像分割。分割后的目标确保与其他目标分离,连续编号,形成标号图像,同时,与标号目标中象元的原始行列号也记录下来。对于所得到的标号图像,分别进行尺度检测和最小峰值检测。尺度检测检测是为了剔除过小的目标。参考rdt(rapid development thunderstorm)算法,取49象元为最小面积阈值,按fy
‑
4a agri4km
×
4km空间分辨率计算,
大约为784km2。最小峰值检测则要求在目标区内必须有最小值,同时,最小值与周围象元的温差在3k以上。当完成尺度检测和最小峰值检测后,再次对对流进行单时刻多光谱阈值法(pca以后筛选出的判据条件)进行非对流单元的剔除,多光谱阈值由线下训练模块提供。
68.步骤3)对流跟踪
69.对流跟踪方法首先需要估计数据帧间的光流,对判识的目标利用光流进行位置的订正,如图2所示,再采用面积重叠的方法进行判别跟踪,如图3所示。这种方法假设在连续的两张卫星图像上,若前后两时刻的云团的位置有重合,且达到一定重合率,则可认为后一时刻的云团可能是前一时刻的云团发展而来的。
70.图3为面积重合法的示例,其中左侧云团为t时刻的云团,右侧为t 1时刻的云团,其重合部分如图。如果重合率(重合面积和前一个时刻的云团面积比值)大于40%,则t 1时刻的这个云团就认为是从t时刻的云团演变而来的。t时刻的云团就认为是t 1时刻云团的先行目标,t 1时刻的云团则为t时刻云团的后续目标。
71.步骤4)对流初生敏感因子构造
72.mecikalski et al.(2010)详细描述了多通道红外判据在检测对流云发展的研究和应用情况。siewert et al.(2009)进一步讨论了利用msg seviri(meteosat second generation,第二代气象卫星)数据和不同的对流追踪技术检测对流初生。但他只是说明了在对流初生算法中使用多种光谱信息检测的重要性。mecikalski et al.(2010)给出了所有可能的光谱检测并将它们从物理意义上分为三类:1)云厚度,2)云顶冻结以及3)上升气流强度。从这三个物理分类进行检测,确定哪些光谱检测是多余的,哪些包含了最重要的信息。因此,研究结果给出了所有对流事件的光谱平均值,以及哪个光谱检测最重要。对于风云四号卫星的对流初生算法,这就是多光谱检测的判据。mecikalski et al.(2010)使用msg其他光谱通道作为三类物理检测的扩展,其结果是从平均值中分离出标准差,然后构建临界值。由于之前的研究是使用15分钟分辨率的数据,因此在使用5分钟时间分辨率的数据时要相应做一些变化。
73.mecikalski and bedka(2006)的算法在业务中只用了当前goes系列卫星的红外光谱通道。当前的算法可以探测出90%(当满足所有的判据阈值时)的对流初生情形,但同时有较高的虚警率(mecikalski et al.2008)。高误报率源于基于单个像元的目标追踪和验证,如果采用目标验证方法,则可提高精度。本发明在红外光谱通道的基础上,创新地提出使用可见光与数值预报背景场的不稳定因子作为输入(具体参考表1),进一步剔除虚假目标,从而减低对流初生识别的虚警率。
74.表1根据fy
‑
4a/agri与背景场资料构造的对流初生的敏感因子。
75.对流初生敏感因子物理意义数据来源10.8μm亮温云顶高fy
‑
4a/agri10.8
‑
6.2μm亮温差云顶相对于上层对流层的高度fy
‑
4a/agri10.8
‑
12.0μm亮温差分裂窗云顶相态fy
‑
4a/agri8.5
‑
10.8μm亮温差云顶相态fy
‑
4a/agri2*10.8
‑
12.0
‑
8.5μm亮温差云顶相态fy
‑
4a/agri10.8μm亮温时间变化率云的抬升fy
‑
4a/agri10.8
‑
6.2μm亮温差时间变化率云的抬升fy
‑
4a/agri
10.8
‑
12.0μm亮温差时间变化率云顶相态变化fy
‑
4a/agri8.5
‑
10.8μm亮温差时间变化率云顶冻结变化fy
‑
4a/agri0.64μm反照率*有效粒子半径\光学厚度fy
‑
4a/agri0.64与1.6μm通道比值云顶相态fy
‑
4a/agri最佳抬升指数(bli)对流抬升趋势数值预报预报场对流有效位能(cape)对流抬升的势能数值预报预报场
76.*表示太阳天顶角小于60
°
时使用。
77.步骤5)训练与验证数据集构造
78.多光谱对流判据敏感性实验与分类数据集制作。针对每一个强对流天气个例,其生命每个时刻都匹配上相应的参数来描述对流系统的特征来形成一个观测记录样本。这些参数来自卫星观测和数值预报分析场,都是中国地区的对流强降水预报中常用的参数,其中有一部分参数也被其他研究用于对流天气系统的经验预报。天气多源数据与候选对流判据时空匹配;敏感性试验:主成分量分析,挑选出候选判据(ifs)里面敏感的部分,作为实际的判据;按照下垫面、季节等因素进行分类,制作数据集。图4是多光谱对流判据敏感性实验与分类数据集制作模型流程图;图5是目标识别、跟踪主体框架以及对流完整时间序列案例数据集构建示意图。
79.相对于satcast的模糊检验方法,本发明首次提出基于目标全周期跟踪的精确检验方法。分别根据卫星资料与地基雷达资料建立对流目标检测识别与跟踪主体框架,构建包含从对流初生到成熟阶段整个生命史时间序列数据集,构造途径包括快速发展对流监测系统与人工标注方法。在分别建立的对流时间序列数据集的基础上,对卫星与地基雷达识别的对流系统进行时空匹配融合处理,确认对流初生发生的位置与时间。对于为卫星提前于雷达(35dbz)对流初生预警的情形,此时卫星识别的对流初生认定为实际的对流初生;如果出现雷达(35dbz)对流提前于初生预警的情形,需要对卫星对流观测进行反向跟踪,找到雷达35dbz对应的对流单元补充为实际的对流初生。确定对流初生发生的位置与时间后仍需要反向追踪进行延伸,以便查询到对流初生触发前时刻的背景场的条件信息。这样完成了对流触发前背景条件、对流初生、对流发展与成熟等对流完整时间序列案例数据集的构造。在此基础上,构建的灾害类型数据与完整时间序列对流案例数据集时空匹配,作为灾害类型预警的模型训练与检验标签数据
80.步骤6)基于随机森林的对流初生识别算法
81.随机森林方法的基本机制是首先根据训练数据建立多个分类树,然后通过多数投票得到最终的预测结果。随机森林算法通过用学习样本替换引导样本来开始随机选择。接下来,从每个引导示例创建树时,将在每个节点上创建一个拆分,以最恰当地分隔两个类。如果创建的引导样本数为500,则最终的分类树数也为500,形成一个林。例如,如果分类树数为500,400棵树预测是对流初生结果,剩下的100棵树预测不是对流初生,那么最终的预测结果就是对流初生。一旦建立了分类树,就可以随时将fy
‑
4a/agri与背景场资料构造的对流初生的敏感因子输入随机森林模型,得到分类的结果。
82.在执行随机森林模型之前,需要调整两个参数。第一个参数是分类树数,分类树数的增加会减少估计误差,但计算量也会增加。有结果已经证明,500棵树足以产生稳定的对流初生的判识估计。第二个参数是预测变量总数(q)和从q预测变量中随机选择的预测变量
数(p)。在随机森林法的训练过程中,只使用训练数据集。在确定解释变量的最佳组合或p的最佳值时,使用袋外数据(out
‑
of
‑
bag,oob)样本来计算估计误差。在确定了最佳解释变量组合后,才确定p。
83.实现效果:
84.图6显示了发生在北京西北部的2020年7月6日基于背景场资料以及机器学习的风云四号对流初生预警技术对流识别案例。其中,图6(a)是2020年7月6日世界时02:45案例;图6(b)是对流初生预警技术识别结果雷达回波。从图中可以看到,该事件预警的时间为时间时2:45,而雷达反应时间为4:00,与雷达相比,基于背景场资料以及机器学习的风云四号对流初生预警技术的提前量为1个小时15分钟。
85.图7显示了数值预报背景场中最佳抬升指数(bli)与对流有效位能(cape)对流初生判识正负样本的概率分布图。其中,图7(a)是数值预报背景场中bli对流初生识别正负样本的概率分布图;图7(b)是数值预报背景场中cape对流初生识别正负样本的概率分布图;根据该图可以发现,通过bli与cape的阈值法处理可以剔除一部分虚假目标。
86.图8给出了根据数值预报背景场中最佳抬升指数或者对流有效位能阈值化后对流初生识别与未经过背景资料资料处理的对流初生识别对比结果。其中,图8(a)是基于cape阈值化对流初生识别结果,图8(b)是基于bli阈值化对流初生识别结果;图8(c)是未经过bli或cape阈值化后对流初生识别结果;图8(d)是雷达回波累积频数分布图;对比框结果可知,加入背景场资料能够有效剔除虚假的对流初生目标。
87.图9展示了0.64μm与1.6μm反照率强度比分布与对流识别对应的关系。其中,图9(a)是北京时2020年8月10日11:00时0.64μm与1.6μm反照率强度比,图9(b)是北京时2020年8月10日11:00
‑
11:30雷达回波累积分布图;图9(c)是北京时2020年8月10日12:00时0.64μm与1.6μm反照率强度比,图9(d)是北京时2020年8月10日12:00
‑
12:30雷达回波累积分布图。框图中为0.64μm与1.6μm反照率强度比小值,而雷达回波未有反应。对比从累积的雷达回波频数可以看出,0.64μm与1.6μm反照率强度较弱的没有雷达回波的分布,可以证明0.64μm与1.6μm反照率强度比在剔除虚假的对流初生目标方面能提供信息。
88.实施例2
89.本发明的实施例2提出了一种基于背景场资料和机器学习的静止轨道卫星对流初生预警系统,该系统包括:对流初生预警模型、预处理模块、粗判别模块、判别跟踪模块、敏感因子构造模块和对流初生预警输出模块;其中,
90.所述预处理模块,用于对静止轨道气象卫星连续采集的两帧卫星云图进行预处理;
91.所述粗判别模块,用于对预处理后的两帧图像分别进行对流快速粗判别得到对应的对流目标;
92.所述判别跟踪模块,用于计算预处理后的两帧图像间的光流,根据光流对对流目标进行位置的订正,再采用面积重叠的方法进行判别跟踪,确定对流目标;
93.所述敏感因子构造模块,用于根据判别跟踪确定的对流目标的多光谱响应,结合数值预报背景场,构造敏感因子;
94.所述对流初生预警输出模块,用于将敏感因子输入预先建立和训练好的基于随机森林方法的对流初生预警模型,得到分类结果,从而实现对流初生预警。
95.需要说明的是,本发明以风云四号静止轨道气象卫星为例,但不限于风云四号,对于新一代静止轨道气象卫星,例如日本的葵花八号卫星、美国的goes
‑
r卫星及欧洲的mtg卫星都适用。
96.最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。