1.本发明涉及保健设备技术领域,特别是一种心肺导引机器人及其控制方法。
背景技术:
2.前因看手机、开车、长时间在电脑前办公,以及坐姿不正,造成非常多的人都患有各种脊柱关节疾病,尤其脊柱、腰关节、髋关节、膝关节和踝关节这些中心关节问题普遍;同时现在人的生活与工作压力增大,出现失眠、便秘,以及新冠状病毒造成呼吸困难的症状,严重影响身体健康。
3.现有技术与不足:
4.现有按摩调理的装置和方法很多,无论是传统中医推拿按摩技法,还是各种智能化的按摩机器手(如专利201310199836.4柔性按摩机器人、201710904151.3一种医疗保健用按摩机器人、 201010210367.8一种直角坐标式和关节式相结合的中医按摩机器人、201910785770.4一种人体背部推拿按摩智能机器人)在按摩身体穴位或痛点时,只关注于身体某处具体部位,缺乏整体考虑。
5.专利201810435286.4一种脊柱扭动、震动、牵拉的康复方法与脊柱运动康复,但采用的是一种的按摩床,只能做颈部和腰部的横向摇摆运动,通过束缚腰部和腋下两点后,在腰部发力牵引身体,只能调理上身半身的脊柱,不能牵拉整个身体,设备体积大,需要他人或专业人员操作。
6.专利201821800998.3一种律动床垫,床垫只能纵向运动,运动方向单一;同时采用的是床垫整体移动,身体也全部躺床垫上做整体纵向律动,无法在身体部位之间产生牵拉作用。
7.现有技术或简单效果差,或设备庞大、或使用复杂不便。对付身体关节等慢性疾病,必须要有效的方法加持续的时间,因此急需一种使用舒适安全、成本低、体积小、操作简单,既能调理身体的中心关节,又能促进睡眠,解决便秘,能够进入日常生活的保健设备。
技术实现要素:
8.一种心肺导引机器人,包括底座、托盘、驱动机构和控制系统,在驱动机构的驱动下,托盘能在底座上作水平往复式直线运动;托盘长宽尺寸不大于650mmx500mm,托盘往复移动的幅度在100mm以内,托盘一般采用圆形、正方形、正多变形,也可采用与枕头接近的尺寸,优选圆形;底座尺寸与托盘接近或一致。
9.控制系统包括用于检测人体心率的人体心率检测装置,控制系统再依据人体心率检测装置装置控制心肺导引机器人的律动频率与人体心率同步;
10.或者,控制系统包括用于检测人体呼吸频率的人体呼吸频率检测装置,控制系统再依据人体呼吸频率检测装置控制心肺导引机器人的律动频率与人体呼吸频率同步。
11.托盘上可放置柔性垫,当身体平躺时,身体的脚部、小腿、臀部、腰部、腹部、胸部、背部、颈部、脸部可任意角度分别放置在托盘的柔性垫上,跟随托盘一起做水平往复移动。
12.托盘与底座之间采用滚动摩擦机构连接;
13.滚动摩擦机构包括导向机构和滚轮;导向机构为至少两组,且相互平行的固定在托盘上,滚轮至少为两组,每组滚轮包括至少两个滚轮;滚轮与导向机构配套使用,两组滚轮能沿导向机构往复移动,导向机构为导槽或导轨。
14.两组滚轮的内陷凹槽上部分别与两根导杆接触,滚轮的凹槽设计保证与导杆密切接触,同时保证滚轮只能沿着导杆方向往复滚动。滚轮安装在滚轮支架上,滚轮设置在托盘与底座之间,两个导杆两端设有两个固定导杆的导杆支架。
15.滚轮支架设置在托盘的下部,导杆支架固定在底盘上,滚轮在底座上水平复位滚动。
16.进一步,滚轮支架也可设置在底座上部,导杆支架固定在托盘下部,滚轮在托盘下水平复位滚动。
17.身体对机器人的负重压力,直接通过四个滚轮传递到底盘上,律动电机和减速机构均不承受身体重量负荷。其中四个滚轮在其滚动的外表,以及与滚轮接触的托盘或底座表面有弹性材料,如硅胶、聚氨酯材料,保证机器人在使用中有较低的噪音。
18.进一步,所述托盘与底座之间采用滑动摩擦机构连接,包括相互配套使用的导向机构和滑块;导向机构至少为两组;滑块能沿导向机构水平往复移动,导向机构为相互平行的导杆或导槽或导轨。
19.上述两种运动机构优先采用滚动摩擦机构。
20.所述驱动机构包括律动电机和减速机构,至少有一个偏心块和一个滑轮;
21.律动电机固定在底座上,律动电机与减速机构连接;减速机构可采用涡轮丝杆减速箱、齿轮减速箱、皮带和皮带轮减速器,优先采用涡轮丝杆减速箱;滑轮为带螺杆的轴承。
22.减速机构有一个输出轴,或两个输出轴,偏心块固定在输出轴上,滑轮的中轴固定在偏心块上,滑轮的中心与减速机构的输出轴中心的距离为律动机器人律动幅度的一半。
23.在托盘的底部设有长方形凹槽,滑轮嵌入在凹槽中,与凹槽的内壁接触,滑轮可在凹槽内往复滚动;律动电机的转动通过减速机构、偏心块、滑轮组成的传动机构带动托盘的凹形槽,和托盘一起作往复运动,滑轮的外圈,或在凹槽与滑轮的滚动接触面,采用弹性材料,如硅胶或聚氨酯,减少律动时的噪音。
24.所述控制系统与律动电机连接,包含控制板和控制器,采用外接电源或电池提供动力;控制器设在底座上,或外接于底座外部,通过蓝牙或无线网用遥控器或手机控制;控制系统具有开关机、定时、调节律动电机转速功能,通过律动电机转速控制律动频率。
25.进一步,控制系统还包括人体心率检测装置,控制系统可依据人体心率控制多方位气血律动机器人的律动频率与人体心率同步。
26.或者,控制系统包括人体呼吸频率检测装置,控制系统可依据人体呼吸频率控制多方位气血律动机器人的律动频率与人体呼吸频率同步。
27.进一步,所述滚动摩擦机构和驱动机构也可采用类似四轮车的结构,由律动电机驱动轮子,通过律动电机的正反转,实现托盘水平往复运动。
28.进一步,在底座和托盘的外部设有柔性外套,其材料可选用弹力布或弹性塑胶,也可采用无弹力周边带褶皱的面料,优选弹力布。
29.进一步,所述底座的外侧设有柔性的材料如高密度海绵防护套,海绵防护套与托
盘、驱动机构的运动部位之间均留有间隙,海绵防护套外面紧贴着弹力外套。
30.采用弹性外套内衬海绵防护套,将托盘和底座整体包裹的设计,既可保证托盘能灵活自由律动,又能防止头发、手指或异物卡在运动部件的缝隙中,同时可以增加身体触碰时的舒适感,相对现有产品塑料或金属外壳更具有亲和力,这是该行业的现有技术和产品中没有使用的方法。
31.进一步,所述托盘上部还设有可自由旋转的上转台,托盘通过上转台与人体部位接触;上转台既能与托盘一起水平往复运,又可在托盘上水平自由转动。
32.当托盘和底座在原地转动时,上转台角度与人体姿势保持不变,只是随着托盘改变往复移动的方向;上转台上还可设有与其尺寸接近的柔性垫。
33.设置上转台目的,就是身体部位可以获得不同的律动方向,例如当身体平躺,脚部位放在上转台上,作横向往复移动一段时间后,需要身体纵向往复运动时,脚部不需要离开上转台,按摩师只需要用手托起底座,将底座水平旋转90
°
,就能让脚部从左右摇摆的横向律动转变为上下的纵向律动。
34.进一步,所述底座的底部还设有下转盘、旋转机构和锁定机构,采用手动或电动驱动底座水平旋转;
35.下转盘在机器人的最底部,与地面,或床面保持静态接触;
36.旋转机构类似于旋转餐桌结构,可在确认律动方向前,用手直接转动底座,让底座转到所需的律动方位后,通过锁定机构,让下转盘与底座固定后,再启动律动电机。
37.锁定机构采用电磁锁,或手动插销结构。
38.当采用电动驱动时,可采用独立的旋转电机,驱动底座水平旋转,结合上转台,可以实现身体部位不离开机器人,一边律动,一边进行向律动方向的调整。
39.进一步,所述控制系统设有托盘位移检测装置,当托盘移动到中间、最大行程(如最左最右最前或最后)位置时,控制系统通过托盘位移检测装置检测到托盘所处位置,位移检测装置采用行程开关、电磁感应或光电开关。
40.进一步,所述托盘上设有垂直升降机构,可以托起上转台;垂直升降机构也可安装在底座内,可以托起托盘;所述垂直升降机构采用伸缩气囊,或采用电动、气动推杆驱动。托盘上还设有柔性垫。进一步,所述柔性垫采用弹性可调的柔性材料,如气压可调的气垫,弹力可变的弹簧垫等。
41.用弹性可调的柔性材料优先采用气垫,可手动气泵控制气垫的气压,也可由控制系统和气泵自动设定气压。
42.托盘通过气垫带动身体律动时,虽然底座内的驱动结构固定了托盘的运动幅度,但当气垫的气压调至一定压力时,气垫受到身体挤压后产生律动变形,形成缓冲效果,会减小托盘对身体的力度,使身体律动幅度减小;而当气垫充满气,或全部泄气时,几乎没有缓冲,身体律动幅度与托盘律动幅度一致,达最大,从而实现律动幅度可调节,便于满足使用者的不同需求。
43.相对传统技术通过改变机械驱动结构来改变律动幅度的办法,此结构仅简单方便,又能增加身体的舒适性;柔性垫也可采用可调气垫和海绵垫双层结构。
44.一种多方位气血律动机器人的控制方法,当人体自然平卧于床上时,将多方位气血律动机器人放置于人体部位,多方位气血律动机器人的托盘带动与其接触的人体部位作
律动动作,而人体其他没有接触的部位,处于静止状态或呈现被动的律动动作;所述的人体部位指脚部、小腿、大腿、臀部、腰部、背部、腹部、胸部或头部;通过控制系统控制托盘以下方向律动:
45.方向1:人体部位作垂直于人体脊柱的水平横向摆动;当托盘运动方向与身体垂直时,身体则呈左右横向律动。
46.方向2:人体部位作平行于人体脊柱的水平纵向往复移动;如身体平躺在床上,脚部放在托盘上,若多方位气血律动机器人的托盘运动方向与身体躯干平行,则身体呈纵向律动。
47.方向3:人体部位作垂直水平面的上下起伏;多方位气血律动机器人内部垂直升降机构,可以托起身体部位作上下起伏。
48.方向4:整个人体沿着脊柱为轴,作反复扭动;由于身体臀部呈半球状,当身体水平横向摆动频率达到一定频率时,身体会从左右水面横向律动,变为身体沿脊柱为中心线的反复扭转动律动。
49.进一步,通过控制系统设置律动方向、律动频率、律动时间以及多个律动方向的组合模式。如当脚部横向律动时,可让托盘同时升降,让脚部做出圆周运动。也可手持多位气血律动机器人托盘朝下与腹部接触,使腹部内脏得到揉动。
50.律动频率一般在0到130次/min左右,并根据不同人的个体差异、调理身体的不同时段,采用不同频率;可分放松准备、按摩调理、休息三个时段。放松阶段,采用0
‑
30次/min的慢频让身体放松适应;按摩调理阶段,需要配合按摩球/棍对穴位按摩时采用稍高的频率;按摩结束休息阶段则恢复慢频率,让身体获得婴儿摇篮的感觉,进一步放松,甚至进入睡眠状态。
51.进一步,先让所述气血律动机器人带动人体连续律动一段时间后,当托盘以某一方向移动到最大运动幅度或最大速度时,让气血律动机器人突然静止,并持续静止一段时间,再恢复律动(恢复优选为缓慢恢复,如律动幅度和频率逐渐增大)。
52.这是一种动静结合的控制方法,气血律动机器人带动身体律动时,律动的不仅是关节、肌肉,体内血管内的血液同样也会随之律动,即血液在血管内正常脉动流动同时,由于身体律动和液体的流动惯性,血液还会在律动方向对血管壁产生额外的律动冲击力,可以改善体内血液的微循环。
53.以水平纵向律动为例,气血律动机器人带动血液律动一段时间后,突然静止,血液瞬间对血管的冲击力会加大数倍,尤其在托盘移动一个完整的行程后,突然静止,托盘产生的加速度最大;若是在头侧方位静止,会产生全身的血液上涌的明显感觉;若是在脚侧方位静止,会产生全身的血液下冲到足心的感觉;由此可以获得中医理论所述的气血上行下行的效果。
54.进一步,所述心肺导引机器人的控制系统先通过人体心率检测装置采集身体心率后,让所述心肺导引机器人的托盘律动频率与心率同频,根据同频共振原理,可让身体外部的动力促进心脏功能,获得“体外辅助心脏”效果。
55.进一步,所述心肺导引机器人控制系统根据身体呼吸频率来控制律动频率,包括同频和降频的方法:
56.所述同频方法指,当身体跟随心肺导引机器人一起律动时,腹腔内的脏器会对横
膈膜不断产生律动的冲击,这种冲击力通过横膈膜传递到肺部;当这种外部的机械律动的冲击与肺的呼吸频率达到一致时,根据同频共振原理,肺部相关的肌肉组织和神经组织会获得这种外部机械传递的动能,生产比平时呼吸更强的呼吸强度,换而言之,这种同频共振能促进肺部呼吸,可以起到体外呼吸器的作用。
57.目前整个医疗行业呼吸机采用的是让外部气体直接导入呼吸道,或通过负压仓让呼吸道外部的身体形成负压,增加肺部与大气的压差,增强呼吸功能。
58.另外胸部挤压辅助呼吸的人工呼吸方法,只是给肺部下压力,增强其收缩力度,不能增强肺部向外的扩张力,只能通过呼吸肌肉和骨骼的反弹,因此只具备单向辅助呼吸功能。
59.本发明创造性开创了呼吸机的新模式,当机器人放置于脚部纵向律动时,带动下肢,在盆腔也形成了纵向的挤压和释放力,进而传递到肺部下方的横膈膜,让横膈膜纵向律动,让肺部从机器人得扩张和收缩的双向力,对于呼吸困难的病人,可起到很好辅助呼吸作用。
60.所述降频方法指,先使用一段时间的同频方法,之后逐步降低律动频率。
61.中医、太极拳、瑜伽、气功导引等诸多健身方法里面都提腹式呼吸、逆腹式呼吸等呼吸方法,其核心观点都是让呼吸尽可能深,吸气和呼气时间尽快能长,降低呼吸频率,通过深呼吸能提高身体的代谢水平,对身体健康非常有益。
62.但是平时肺受神经支配生产的都是无意识的浅呼吸,深呼吸必须靠人们的大脑意识去引导肺的呼吸动作,一般人很难长时间用大脑意识来引导肺呼吸,深呼吸好但难持久。
63.由此本发明创造性提出降频方法,具体实现,例如控制系统检测到身体正常无意识呼吸率为18 次/分钟,先让心肺导引机器人以该频率律动保持20分钟,让肺部产生同频共振效应后,并让大脑和神经系统慢慢适应这种感觉,之后慢慢稍微降低一点心肺导引机器人律动频率,比如降低至16次/分钟,由于身体神经系统在同频阶段已与外部心肺导引机器人产生共振关联,当心肺导引机器人的律动频率稍降低后,神经系统也会让肺的呼吸频率跟随降低后的16次/分钟,继续同频,而此时的肺仍然处于不由大脑支配的无意识呼吸状态,显然呼吸频率降低,呼吸深度增加,从而实现了不需人大脑意识控制的深呼吸!通过心肺导引机器人就可让身体持久获得这种深呼吸,能实现中医的导引功效。
64.进一步,在人体平躺在床面通过所述多方位气血律动机器人律动时,身体底部设有若干按摩球或按摩棍或靠垫,从而对人体该部位产生挤压,同时还可以支撑人体部位。
65.穴位按摩其实包含两个动作,按,发力挤压穴位,摩,来回摩擦、揉动穴位。
66.现有的按摩设备和技术采用是对身体穴位一边往复移动,一边发力挤压的模式;身体的头部、颈部、腿部、眼部、腹部、脚部都有专门按摩设备,这些按摩设备形状、使用方法各不同,不仅成本高,而且使用复杂。其效果与挤压发力大小有密切关系,力度小效果差,力度过大则不安全,同时人与人个体差异巨大,其按摩效果与人工按摩差距较大。
67.本发明所述方法,将“按”与“摩”分开,身体穴位律动完成摩的动作,多方位气血律动机器人不对穴位发力只负责“摩”;而按摩球或按摩棍只对穴位挤压发力,这样组合后,按摩球或按摩棍与律动的穴位形成相对运动和相互作用力,实现穴位按摩的效果。
68.安全:采用身体自重产生按摩的挤压力,更安全。
69.方便:只需在所需的穴位放置按摩球或棍,或采用哪里不舒服就放哪里的方法,让
复杂的身体部位按摩操作变得非常简单,通过改变律动方向,能实现很多中医推拿法中的复杂发力动作,临床测试可达到90%的人工按摩效果。
70.如颈部按摩,身体平躺后只需在颈后放置一个按摩球或按摩棍,通过放置在脚部或臀部的托盘,带动身体纵向或横向律动,就能非常有效的对颈部进行按摩。需要腰部按摩时,只需将按摩球或按摩棍放在腰部即可。
71.当气血律动机器人律动放在身体部位后,如臀部,身体其他部位,如头部和背部会悬空,造成身体不适,在悬空部位放置按摩球或按摩棍或靠垫还可以起到填充和支撑作用,保证身体平衡、舒适。
72.本发明的控制方法特点,在身体自由无束缚状态下,让多方位气血律动机器人牵拉身体一个部位如足部,通过足部带动身体其他部位,让身体各个部位的关节、肌肉、肌腱之间相互产生轻微的、有规律的反复挤压力和牵拉力,通过采用适合的律动幅度,让身体中心关节在持续的律动运动中,十分安全地得到修复,还可让肌肉组织和身体内脏得到放松。
73.现有技术中的足部摇摆机虽也能产生往复摇摆运动,但其与身体接触的运动部件采用的是固定的双凹槽脚托,只能放置脚部踝关节,不适合接触身体其他部位。
74.而本发明采用完全开放式的平面,脚部、小腿、臀部、腰部、背部、颈部、脸部等身体部位都可任意放在托盘上,托盘上的柔性垫使身体部位律动时不会打滑,也可再放置各种式样更舒适的垫子。同时由于托盘本身可任意方向摆放,可使托盘的律动方向与身体脊柱呈任意角度,从而能让与之接触的身体部位产生任意的律动方向。
75.也有专利201810435286.4一种脊柱扭动、震动、牵拉的康复方法与脊柱运动康复,但采用的是一种的按摩床,只能做颈部和腰部的横向摇摆运动,通过束缚腰部和腋下两点后,在腰部发力牵引身体,只能调理上身半身的脊柱,不能牵拉整个身体,设备体积大,需要他人或专业人员操作。专利 201821800998.3一种律动床垫,采用整体床垫纵向运动,身体只能纵向律动,运动方向单一;由于身体全部躺在床垫上,整个身体同时纵向运动,身体部位之间没有相对运动,没有相互的牵拉力,因而无法牵拉身体的中心关节,同样体积较大,使用不便,效果有限。
76.创造性分析:
77.1、创造性的结构设计:
78.1.1采用开放式托盘:打破现有技术只能用于身体单一部位的固定支架(脚架)结构模式,突破现有技术中身体律动的使用范围,更具有通用性。开放式托盘和小巧的外观设计让脚部、小腿、臀部、腰部、背部、颈部、脸部等身体部位都可任意放在托盘上。也可根据个人喜好,在托盘上放置各种式样的柔性垫,使身体部位律动时不会打滑,律动时更舒适。同时由于托盘方向自由,可任意方向摆放,可使托盘的律动方向与身体脊柱呈任意角度,从而能让与之接触的身体部位产生任意的律动方向。
79.1.2采用驱动和滚动各自受力的结构,负载大,能耗低:托盘通过四个滚轮直接压在底板上,在垂直方向使托盘可承受外部上百公斤的压力;而驱动机构不受垂直方向压力影响,仅需克服滚轮的水平方向的滚动摩擦力。实际测量一个成人站在托盘上,也只需十几瓦的小律动电机就可以带动驱动机构让托盘往复律动,因此整个机器人的力学结构设计效率极高。
80.2、创造性地提出气血律动导引的控制方法,包含两个层次:
81.2.1、身体多方向律动控制方法:律动对象为身体骨骼和肌肉组织。身体处于自由无束缚的状态下,通过本发明的多方位气血律动机器人让身体内各个部位之间,在多个方向产生有节奏的、反复的相对微位移,在身体部位之间(如腿部和臀部之间的关节、肌肉组织等),形成反复的微挤压和微牵拉力,达到调理身体中心关节的目的,而现有技术只能实现本发明中的部分功能。
82.2.2、同频共振控制方法:律动对象为血液,是对传统身体律动的升级,现有身体按摩调理设备和方法都将身体骨骼、肌肉当作一个相对静止的固态物体来看待,没有考虑到身体内体重的7
‑
8%的血液!也没有针对全身血液的按摩调理方法和设备。
83.以简单实验说明,双手分别握住一个装有水的杯子,和一块半干的泥团,然后同时摇晃,水会不断冲击杯子内壁产生冲击波,因杯壁的反射叠加,冲击波频率可以得到增加;而泥团几乎没有太大变化;然后再突然将双手停住,杯里的水可能会瞬间冲出杯子,泥团只会微微变形,显然相同加速度下液体和固体所呈现的效果完全不同,如果把身体血管当作杯子,血液就时杯子里的水,身体肌肉和骨骼就是泥团。
84.气血导引控制方法就是以血液为律动对象的一种新方法,在身体律动的基础上,针对血液的液态特性,通过身体律动带动身体的血液产生律动惯性,让血液在血管内流动同时,增加一个对血管产生微微的冲击振荡波,同时可以刺激血管内皮细胞产生对人体有益的一氧化氮,而一氧化氮是一种血管的扩张剂与疏通剂,能迅速的扩血管,保护心脏与血管。
85.参考百度文库体外冲击波目前已广泛应用于泌尿系结石碎石和骨科矫形等,近年来有学者发现体外冲击波具有改善心血管缺血病变的作用,动物实验和临床研究发现,低能量的体外冲击波可以上调血管内皮生长因子的表达,促进血管新生,促进一氧化氮生成,增加局部血液灌注,显著减轻心绞痛症状,改善左室功能和重构,该文就体外冲击波的性质,生物力学作用,对心血管疾病的治疗机制,研究现状及发展前景作一简介.[1]薛凤泰,张松.体外冲击波在心血管疾病中的应用[j].国际心血管病杂志,2016,43(006):334
‑
336.
[0086]
3、创造性地提出心脏同频共振的控制方法:
[0087]
让机器人的律动频率与心率同频,根据同频共振原理,可让心脏功能增强,达到“体外辅助心脏”效果,这时医疗行业从未有的技术。
[0088]
4、创造性地提出呼吸同频共振的控制方法:
[0089]
目前医疗行业辅助人体呼吸的办法都是采用呼吸机,通过呼吸机外部空气直接导入呼吸道,需要佩戴呼吸面罩或采用有创插管,既不方便也有增加感染的风险;或通过全部将人体罩主的负压仓,在呼吸道外部的身体形成负压,增加肺部与大气的压差,增强呼吸功能,设备庞大复杂,操作繁琐。
[0090]
另外传统胸部挤压的人工呼吸,采用垂直于身体的外力,挤压肺部的肋间肌和肋骨,只能给肺部下压力,增强其收缩力度,不能直接对肺部产生向外的扩张力,只能通过呼吸肌肉和骨骼的反弹,因此只具备单向辅助呼吸功能,也只能偶尔用于急救,不能长期使用。
[0091]
通过分析呼吸运动模式发现,参与人体呼吸的肌肉主要包括肺部周围的肋间肌、背部肌肉、肺下方的横隔肌,腹肌和盆底肌等;人体在非运动时静态自然呼吸,一般都是胸式呼吸,肺叶主要是左右横向的收缩扩张,参与的肌肉主要是非周边的肌肉群,肺下部的横
隔肌、腹肌等为辅。
[0092]
本发明创造性开创了辅助呼吸的新方法,当机器人放置于脚部纵向律动时,带动下肢,对盆腔的盆底肌和腹肌形成了纵向的挤压和释放力,进而传递到肺部下方的横膈肌,让横膈膜纵向律动,直接对肺部产生纵向的挤压和扩张力,让肺部从机器人得扩张和收缩的双向辅助力。
[0093]
当律动频率与人体自然呼吸频率同频,相对胸式呼吸,额外增大了横隔肌、腹肌和盆底肌对肺部的作用力,起到被动腹式呼吸的效果,对于呼吸困难的病人,可起到很好辅助呼吸作用,却比现有技术更简单、安全、方便。
[0094]
5.让传统养生呼吸导引变得简单:
[0095]
中医、太极拳、瑜伽、气功导引等诸多健身方法里面都提腹式呼吸、逆腹式呼吸等呼吸方法,其核心都是让吸气和呼气时间尽快能长,减慢呼吸频率,通过深呼吸能提高身体的代谢,对身体健康非常有益。
[0096]
但是平时肺受神经支配生产的都是无意识的自主浅呼吸,深呼吸必须靠大脑意识去引导肺的呼吸动作,一般人很难长时间用大脑意识来引导肺呼吸,所以方法虽好但难持久。
[0097]
由此本发明创造性提出降频方法,具体实现,例如控制系统检测到身体正常无意识呼吸率为15 次/分钟,先让心肺导引机器人以该频率律动保持20分钟,让肺部产生同频共振效应后,并让大脑和神经系统慢慢适应这种感觉,之后慢慢稍微降低一点心肺导引机器人律动频率,比如降低至14次 /分钟,由于身体神经系统在同频阶段已与机器人产生共振关联,当心肺导引机器人的律动频率稍降低后,神经系统也会让肺的呼吸频率跟随降低后的14次/分钟,继续同频,而此时肺仍然处于不由大脑支配的无意识呼吸状态。显然呼吸频率降低,呼吸深度增加,从而实现了不需人大脑意识控制的深呼吸!通过机器人就可让身体持久获得这种深呼吸,能实现中医的导引功效
[0098]
此外本发明还具有以下特点和有益效果:
[0099]
·
使用舒服,改善睡眠:全身放松是调理和恢复任何病症的前提,本发明的气血律动机器人使用非常安静,身体无任何约束,也没有激烈的敲打震动,临床测试中发现,这种安静舒适的身体律动,很容易进入睡眠状态,而睡眠是身体放松的最高级别;同时也非常轻松地解决困扰人们的失眠问题。
[0100]
·
关节正位:医学研究表明,身体很多病症都与中心关节错位有关,从上到下包括颈椎到骶椎 24对的脊椎、胯关节、髋关节、膝关节、踝关节,关节归位才能让肌腱组织放松。本发明放置与足部时的纵向律动,可以牵引整个身体的中心关节得到缓慢反复挤压和牵拉,通过持续较久时间,让错位关节缓慢得到正位,缓慢保证安全,时间保证有效。
[0101]
·
改善便秘:身体的多方向律动时,盆腔会受到反复挤压和牵拉,可加速肠道蠕动,改善便秘。
[0102]
·
方便高效:很多慢性疼痛都是长时间不良习惯造成的,那么恢复方法同样也需要时间,因此只有进入家庭,日用化使用,才能保证效果。本发明体积小巧,能耗低(实际测试消耗功能不到20瓦)、使用简单,任何人都可以一个人操作使用,可以直接放置在卧室的床上,同时使用舒服,每次睡前都可以使用。
[0103]
·
简单安全:不同于医疗正骨,本发明的设计思想就是通过长时间的方便使用,让
身体在缓慢、细微变化中得到改善。使用时,无论是气血律动机器人与身体接触的部位,还是没有接触的部位,这是身体部位都可以随时自由活动,不需要专业人员操作。同时气血律动机器人外表采用布艺和海绵防护套的整体设计,没有任何可插入的缝隙,即不会缠绕女性的长头发,也不会夹手指,相对现有的律动按摩设备更具亲和力和安全性。
[0104]
本发明已经在临床及教学应用近一年(未公开),上述效果已得到过反复的印证。
[0105]
总之,使用机器人的目的是代替或辅助人实现各种动作,按人的样子做个有手有脚有电脑,复杂的机器人并不是创新。本发明通过对人体结构和功能的提炼、抽象,挖掘出机器人代替人工的技术核心是,让机器来帮助人完成简单、连续、重复的动作;可使结构简化、可靠,并带来非常显著的成本优势,又能实现如此之多极具创造性的效果,所以本发明相对现有技术有明显进步,绝非一般技术人员可以想到的。
附图说明
[0106]
图1a为机器人外观侧视示意图;
[0107]
图1b为机器人外观俯视示意图;
[0108]
图2a为机器人向左位移侧视示意图;
[0109]
图2b为机器人向左位移俯视示意图;
[0110]
图3a为机器人向右位移侧视示意图;
[0111]
图3b为机器人向右位移俯视示意图;
[0112]
图4为机器人无外套的示意图;
[0113]
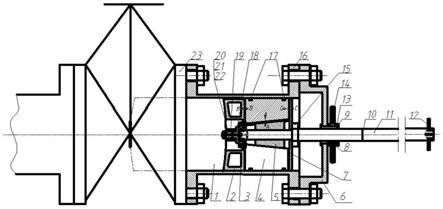
图5为机器人装配俯视示意图;
[0114]
图6为机器人装配侧视示意图;
[0115]
图7为机器人的托盘侧视示意图;
[0116]
图8为机器人的托盘顶仰视意图;
[0117]
图9为机器人的底座结构侧视示意图;
[0118]
图10为机器人的底座结构俯视示意图;
[0119]
图11为机器人的底座安装海绵防护套后内部结构侧视示意图;
[0120]
图12为机器人的底座安装海绵防护套后外部侧视示意图;
[0121]
图13为机器人的底座仰视示意图;
[0122]
图13a为机器人的滚轮安装在底座的结构示意图;
[0123]
图13b为机器人的滑块安装在托盘的结构示意图
[0124]
图13c为机器人的滑块安装在底座的结构示意图
[0125]
图14为机器人增加上转台后的装配侧视示意图;
[0126]
图15a为机器人增加上转台和下转盘后装配侧视示意图;
[0127]
图15b为机器人下转盘的驱动机构内齿轮啮合示意图;
[0128]
图16为机器人托盘安装左右位置磁铁后俯视示意图;
[0129]
图17为机器人底座安装左右位置磁性开关后俯视示意图;
[0130]
图18为机器人托盘为机器人向右位移磁铁与磁性开关结构侧视示意图;
[0131]
图19为机器人托盘为机器人向左位移磁铁与磁性开关结构侧视示意图;
[0132]
图20为机器人采用律动电机直驱滚轮的内部结构俯视示意图;
[0133]
图21为机器人采用律动电机直驱滚轮的内部结构侧视示意图;
[0134]
图22为机器人采用气囊升降托盘上升状态示意图;
[0135]
图23为机器人采用气囊升降托盘下降状态示意图;
[0136]
图24为机器人采用气囊升降底座上升状态示意图;
[0137]
图25为机器人采用气囊升降底座下降状态示意图;
[0138]
图26为机器人采用托盘上气垫充气的状态示意图;
[0139]
图27为机器人采用托盘上气垫泄气的状态示意图;
[0140]
图28为机器人放置在脚部使用示意图;
[0141]
图29为机器人放置在臀部使用示意图;
[0142]
图30为机器人放置在背部使用示意图;
[0143]
图31为机器人放置在腹部使用示意图;
[0144]
图32为机器人放置在脚部纵向律动使用示意图;图33为机器人放置在脚部横向律动使用示意图。
[0145]
标号说明:1
‑
托盘;10
‑
滚轮支架;11
‑
滚轮;12
‑
托盘偏心孔;13
‑
柔性垫;14
‑
左位磁铁;15
‑ꢀ
右位磁铁;
[0146]2‑
底座;20
‑
减速机构;21
‑
导杆;22
‑
导杆支架;23
‑
偏心块;24
‑
滑轮;25
‑
底盘;26
‑
脚垫;27
‑ꢀ
海绵防护套;28
‑
下转盘;291
‑
右限位磁开关;292
‑
左限位磁性开关;
[0147]3‑
律动电机;30
‑
滑块;
[0148]4‑
上转台;401
‑
升降台;
[0149]5‑
下转盘;501
‑
转盘电机;502
‑
转盘小齿轮;503
‑
转盘齿轮;504
‑
转盘轴承动环;505
‑
转盘轴承静环;506
‑
电磁插销;507a
‑
横向插孔;507b
‑
纵向插孔;508
‑
横向磁性开关;509
‑
纵向磁性开关; 511
‑
转盘磁铁;
[0150]6‑
按摩棍;7
‑
按摩球;8
‑
导向套;80
‑
垂直导向杆;81
‑
伸缩气囊;82
‑
下旋转底盘;9
‑
柔性外套。
具体实施方式
[0151]
注:本发明所述的多方位气血律动机器人以下简称机器人。
[0152]
以下将结合附图和具体实施例对本发明做进一步详细说明:
[0153]
实施例1:
[0154]
本实施例的机器人,包括圆形的托盘1和底座2,并通过柔性外套9将二者设有成一个圆盘状的整体,其中托盘1大小尺寸与身体臀部接近,直径在200
‑
350mm左右,托盘1与底座2之间的高度图中比例所示,约70
‑
150mm左右,托盘1往复移动的幅度在10
‑
40mm左右,本实施例外部设有布质或硅胶的柔性外套9。参见图1,托盘1移至左端状态参见图2;示托盘1移至右端状态参见图3;托盘 1和底座2去掉柔性外套9的状态,参见图4
‑
6。
[0155]
其中托盘1下部有四套带支架11的滚轮12,托盘1中部的凹槽采用长方形开孔12,托盘1上部有海绵层13,海绵层13通过柔性外套9与身体部位接触,参见图7和图8,其中滚轮12外圈的圆周面中部有内陷凹槽。
[0156]
其中底座2安装有律动电机,3和由减速机构20、导杆21、导杆支架22、偏心块23、滑轮24、底盘25组成的驱动机构,律动电机3通过减速机构20带动偏心块23旋转,滑轮24安装
在偏心块 23上。
[0157]
托盘1的四个滚轮11与底盘25接触,能在底盘25上面往复滚动;滑轮24与托盘1长方形开孔 12的内壁接触,两组滚轮12的内陷凹槽上部分别与两根导杆21接触,滚轮11的凹槽设计保证与导杆21密切接触,同时保证滚轮11只能沿着导杆21方向往复滚动;这样当律动电机3驱动滑轮24作偏行旋转运动时,会挤压托盘上方型孔12内壁,从而使托盘1与律动电机3同步运动,而底座上的两个导杆21,则起到轨道作用,约束托盘1只能沿着导杆21做往复移动;身体对机器人的负重压力,直接通过四个滚轮11传递到底盘25上,律动电机3、减速机构20、导杆21、滑轮24均不承受身体重量负荷。其中滑轮24和四个滚轮11在其滚动的外表有弹性材料,如聚氨酯,保证机器人在使用中,有较低的噪音。两个导杆21两端设有两个固定导杆的导杆支架22,导杆支架22固定在底盘25上,参见图9和图10。
[0158]
在底盘25上部的外缘一圈,固定有柔性的材料如高密度海绵防护套27,海绵防护套27顶部与托盘1的底部之间,以及和四个滚轮11及滚轮支架10之间均留有间隙,保证托盘1及滚轮11在往复移动时不会与海绵防护套27发生摩擦,同时具有透气散热性。海绵防护套27与布质外套9既能增强设备的使用舒适性,又能防止托盘1夹手指,保证使用时有足够的安全性,参见图11和图12。底盘25的底部还设有脚垫26,参见图13。
[0159]
实施例2:
[0160]
本实施例与实施例1的区别在于,滚轮支架10安装在底座上部,导杆支架22固定在托盘1下部,滚轮11只转动,不作水平往复运动;托盘1压在滚轮11上,托盘1、导杆支架22和导杆一起作水平复位滚动,参见图13a。
[0161]
实施例3:
[0162]
本实施例与实施例1的区别在于,所述托盘与底座之间采用滑动摩擦机构连接,包括相互配套使用的导向机构和滑块30;导向机构为两根相互平行的导杆21;滑块30能沿导向机构水平往复移动,导杆21固定在底座上,滑块20与托盘固定,参见图13b。
[0163]
实施例4:
[0164]
本实施例与实施例1的区别在于,所述托盘与底座之间采用滑动摩擦机构连接,包括相互配套使用的导向机构和滑块30;导向机构为两根相互平行的导杆21;滑块30能沿导向机构水平往复移动,导杆21固定在托盘上,滑块30与底座固定,参见图13c。
[0165]
实施例5:
[0166]
本实施例与实施例1的区别在于,在托盘1和柔性垫13之间还装有上转台4,上转台4的尺寸与托盘1一致或接近,柔性垫13固定于上转台4上,身体部位放置在上转台4之上,其中上转台4 与托盘1保持自由旋转状态,在托盘1带动上转台4一起往复移动时,上转台4相对托盘1又可以自由转动,这样当身体平躺时脚部压在柔性垫13和上转台4上后,上转台4的运动方向能始终与身体一致,当托盘1和底座4在原地转动时,上转台4角度与身体姿势保持不变,只是随着托盘1改变往复移动的方向;当需要改变托盘1相对身体的运动方向时,脚部不需离开柔性垫13和上转台4,只需用手将底座2与床面抬离,将底座2旋转即可,便于连续调整身体的律动方向,参见图14。
[0167]
实施例6:
[0168]
本实施例与实施例5的区别在于,在实施例5的基础上,在底座2下部再增加下转盘5、旋转机构、位置检测装置和锁定机构,旋转机构包括转盘电机501、转盘小齿轮502、转盘
齿轮503、转盘轴承动环504、转盘轴承静环505。
[0169]
其中律动电机3、驱动机构均固定在下转盘5上;转盘轴承动环504与下转盘5固定连接,转盘轴承静环505与底座25固定连接;下转盘5通过转盘轴承动环504和转盘轴承静环505紧贴于底座 25上;转盘律动电机501和转盘小齿轮502安装在下转盘5上;转盘齿轮503安装在底座25上;转盘小齿轮502与转盘齿轮503动态啮合,转盘电机501通过转盘小齿轮502驱动转盘齿轮503相对转动,进而使下转盘5相对于底盘25旋转。通过底座相对下转盘5旋转,实现律动方向的改变。
[0170]
位置检测装置包括安装在下转盘5上的两个水平位置相差90
°
的横向磁性开关508,和纵向磁性开关509,以及安装在底座上转盘磁铁511;
[0171]
锁定机构采用电磁插销,包括安装在下转盘5上的电磁插销506,底座上的横向插孔507a,底座上的纵向插孔507b,横向插孔507a与纵向插孔507b相差90。电磁插销采用自保持型,通电插销抽出,断电保持抽出状态,再通电,插销缩回,断电仍保持缩回状态。
[0172]
当控制系统现有执行改变律动方向的程序时,例如由横向律动方向,转换导纵向律动方向:首先电磁插销506与横向插孔507a处于相互锁定状态,给电磁插销506通电,电磁插销从插孔抽出,将底座释放为自由状态,再让转盘电机501通电让底座旋转90
°
,当磁纵向性开关509与转盘磁铁511 接近时,磁性开关反馈给控制系统相应的信号,转盘电机501停止,磁插销506再通电,通电插销抽出插入纵向插孔507b,使底座与下转盘锁定。参见图15和图15a。
[0173]
实施例7:
[0174]
本实施例与实施例6的区别在于,锁定机构采用手动插销,同时旋转机构也不用电机,直接用手直接转动底座,使其相对下转盘5旋转,实现律动方向的改变。手动插销类似普通门插销结构,在此不另行说明。
[0175]
实施例8:
[0176]
本实施例与实施例1的区别在于,在实施例1的基础上,在移动的托盘上设有左右两个磁铁291 和292,底座上设有左右两个磁性开关14和15,磁性开关可以采用霍尔传感器,两个磁性开关与控制系统连接,参见图16和图17。当托盘移动到最左侧时,磁铁292与左磁性开关14接近,左磁性开关14发出信号给控制系统,参见图18;当托盘移动到最右侧时,磁铁291与右磁性开关15接近,右磁性开关15发出信号给控制系统,参见图19。
[0177]
实施例9:
[0178]
本实施例与实施例1的区别在于,在实施例1的基础上,采用律动电机3直接驱动滚轮11的方式,通过控制系统让律动电机3正反转,实现托盘1往复律动,参见图20和图21。
[0179]
实施例10:
[0180]
本实施例与实施例1的区别在于,在托盘1上还设有垂直升降机构,垂直升降机构包括升降台401、伸缩气囊81和垂直导杆80及导杆套8,其中垂直导杆80顶部与升降台401固定连接,导杆套8顶部固定在托盘1底部,垂直导杆80可在导杆套8内上下移动,气囊采用手动或电动气泵充气。
[0181]
垂直升降机构上的升降台401在与托盘1水平律动同时,升降台401可以上下升降,上转台4安装在升降台401上,并与其保持自由旋转状态;图22为垂直升降机构升起的状态示意图,图23为垂直升降机构降下时的状态示意图。
[0182]
实施例11:
[0183]
本实施例与实施例10的区别在于,垂直升降机构安装在底座2内,在底盘25上增加一个旋转底盘 28,底盘25与旋转底盘28可相互转动同时,还可以托起旋转底盘28连同驱动机构和托盘上下升降。
[0184]
垂直升降机构包括伸缩气囊81、下旋转底盘28、垂直导杆80及导杆套8,其中垂直导杆80底部与下旋转底盘28固定连接,导杆套8底部固定在托盘1底部,垂直导杆80可在导杆套8内上下移动,下旋转底盘26与底座可旋转。图24为托盘1升起的状态示意图,图25为托盘1下时的状态示意图。
[0185]
实施例12:
[0186]
本实施例与实施例10或11的区别在于,其垂直升降机构采用电动或气缸推杆,由于电动推杆和气缸推杆的升降结构为普通现有技术,在此不另行说明。
[0187]
实施例13:
[0188]
本实施例与实施例1的区别在于,柔性垫13采用气压可调的气垫,图26和图27为气垫充气和泄气的状态,控制系统通过气泵控制气垫的压力,气囊采用手动或电动气泵充气。由于这些都是成熟的现有技术,在此不另行附图。
[0189]
实施例14:
[0190]
本实施例与实施例1
‑
13的区别在于,托盘1、底座2都采用矩形,或正多变形,其中托盘1大小尺寸与身体臀部接近,在此不另行说明。
[0191]
本发明所述气血律动的调理身体方法可分别采用或组合采用以下方法:
[0192]
1、身体多部位分别与机器人接触律动:
[0193]
身体平躺时,脚跟,或小腿,或臀部,或腰部,或背部可放置机器人上,或将机器人朝下,放在腹部上。
[0194]
身体坐立时,可以将臀部或脚底放坐在或踩在机器人上,参见图28
‑
31。
[0195]
2、身体与机器人在多个方向律动:
[0196]
机器人水平律动方向与身体垂直时,身体部位则左右往复摆动;
[0197]
机器人水平律动方向与身体同向时,身体部位则向纵向复摆动,参见图32;
[0198]
机器人垂直律动时,身体部位则上下起伏。
[0199]
3、采用时间和律动频率组合调节方式调理身体,律动频率从0到130次/min左右,并根据不同人的个体差异、调理身体的不同时段,采用不同频率;可分放松准备、按摩调理、休息三个时段。放松阶段,采用0
‑
30次/min的慢频让身体放松适应;按摩调理阶段,需要配合按摩球/棍对穴位按摩时采用稍高的频率;按摩结束休息阶段则恢复慢频率,让身体获得婴儿摇篮的感觉,进一步放松,甚至进入睡眠状态。
[0200]
4、律动与中断结合
[0201]
先让机器人带动身体连续律动一段时间后,当托盘以某一方向移动一个完整运动幅度时,再让机器人律动电机3突然静止,并持续一段时间,再慢慢恢复纵向律动;或采用与之相反的方向操作。
[0202]
以水平纵向律动为例,机器人带动血液律动一段时间后,突然静止,血液瞬间对血管的冲击力会加大数倍,尤其在托盘移动一个完整的行程后,突然静止,托盘产生的加速度最大;若是在头侧方位静止,会产生全身的血液上涌的明显感觉;若是在脚侧方位静止,会
产生全身的血液下冲到足心的感觉;做身体其他律动方向时方法同理。
[0203]
5、采用身体自重按摩:在身体平躺在床面通过所述气血律动机器人律动时,身体部位设有若干按摩球或按摩棍或靠垫,利用身体自重对身体该部位产生挤压,同时还可以支撑身体部位,其中按摩球或按摩棍直径在20
‑
50mm左右,按摩棍长度与身体宽接近。
[0204]
如颈部按摩,身体平躺后只需在颈后放置一个按摩球或按摩棍,通过放置在脚部或臀部的托盘,带动身体纵向或横向律动,就能非常有效的对颈部进行按摩。需要腰部按摩时,只需将按摩球或按摩棍放在腰部即可。
[0205]
当机器人律动放在身体部位后,如臀部,身体其他部位,如头部和背部会悬空,造成身体不适,在悬空部位放置按摩球或按摩棍或靠垫还可以起到填充和支撑作用,保证身体平衡、舒适。
[0206]
另外,控制系统包括用于检测人体心率的人体心率检测装置,控制系统可依据人体心率检测装置控制多方位气血律动机器人的律动频率与人体心率同步;或者,控制系统包括用于检测人体呼吸频率的人体呼吸频率检测装置,控制系统再依据人体呼吸频率检测装置控制多方位气血律动机器人的律动频率与人体呼吸频率同步。
[0207]
所述多方位气血律动机器人的控制系统先通过人体心率检测装置采集身体心率后,让所述心肺导引机器人的托盘律动频率与心率同频。
[0208]
所述多方位气血律动机器人控制系统通过人体呼吸频率检测装置,先采集身体正常无意识呼吸频率,再根据该频率来控制托盘的律动频率,包括同频和降频的控制方法:
[0209]
所述同频方法指,托盘的律动的频率与身体正常无意识呼吸频率一致;所述降频方法指,先使用一段时间的同频方法之后,控制系统逐步降低托盘的律动频率。
[0210]
以上仅为本发明的优选实施例,并不用于限制本发明,显然,本领域的技术人员可以对本发明进行各种改动、变型而不脱离本发明的精神和范围。倘若对本发明的这些修改和变形属于本发明权利要求及其等同技术的范围之内,均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。