1.本发明涉及康复机器人、智能辅助系统技术领域,具体地说,是一种椅式下肢运动康复机器人。
背景技术:
2.从二十世纪八九十年代开始,对康复机器人的设计研究就已经开始展现苗头,随着研究的深入,衍生出下肢康复机器人这一分支。作为下肢康复机器人的重要分支,椅式下肢康复机器人在康复医疗方面的应用越来越普及,市场占比也在不断上升。传统的下肢康复训练主要由他人帮助患者借助固定机械带动患肢进行被动运动,耗时耗力,而且对场地和设备、人员专业程度需求高,康复训练的稳定性和规范性难以保证。现有技术下的下肢康复机器人一般都为外骨骼式机器人,虽然外骨骼式康复机器人康复效果好,运动自主化程度高,但是存在以下缺点:(1)外骨骼康复机器人更加倾向于定制,制造时间长,成本高。(2)外骨骼康复机器人要考虑移动时对患者的负荷情况,对材料要求高。(3)外骨骼康复机器人重量分配困难,若重量直接压在用户身上,会引起用户不适,严重的话会导致二次创伤。(4)外骨骼康复机器人会影响人体自身平衡,需要学习训练适应。
3.椅式下肢运动康复机器人由于机架固定或者说可以靠滑轮移动,对质量的要求没有那么高,带来的首要收益无疑是成本上的降低,这是椅式康复机器人的优势。其次,椅式康复机器人结构简单,产品更新换代快速,可以说是下肢康复机器人最早最基本的形式,椅式康复机器人仍然有较好的发展前景,是下肢康复机器人的主要形式之一。
技术实现要素:
4.为了克服已有技术的不足,本发明提供了一种椅式下肢运动康复机器人。
5.本发明解决其技术问题所采用的技术方案是:
6.一种椅式下肢运动康复机器人,所述机器人包括运动部分、驱动部分和机架部分,所述机架部分包括靠背、座椅、电机、支撑柱和底座,靠背与座椅之间通过靠背电机相对转动,实现靠背的倾斜,底座与支撑柱的下端固定连接,座椅与支撑柱的上端固定连接,座椅上留有与运动部分连接的区域;
7.所述驱动部分为大腿电动推杆和小腿电动推杆;
8.所述运动部分包括运动机构与机架固定结构、关节连接轴、机械臂可变动部分轴承连接件、大腿机械臂机构、v型弹片、小腿机械臂机构、足部结构、机身左右固定结构、定位连接件和带动人体运动机构,机身左右固定结构和运动机构与机架固定结构固定连接;大腿电动推杆与大腿电动推杆连接件固定连接,大腿电动推杆连接件固定在大腿机械臂机构上;第一关节转动件与运动机构与机架固定结构固定连接,大腿机械臂构件的后端与第一关节转动件通过关节连接轴连接,关节连接轴通过螺栓实现在第一关节转动件中的轴向定位;连接大、小腿机械臂的第二关节转动件的一侧通过螺栓与大腿机械臂构件连接,第二关节转动件的另一侧通过关节连接轴和定位连接件连接,所述定位连接件固定在小腿机械臂
机构上;小腿电动推杆与小腿电动推杆连接件固定连接,小腿电动推杆连接件固定在小腿机械臂机构上,小腿机械臂机构的中部与带动人体运动机构固定连接,小腿机械臂构件的下部与足部结构固定连接。
9.进一步,所述运动机构与机架固定结构上安装有大腿电动推杆,所述座椅上安装小腿电动推杆。
10.所述大腿机械臂机构和小腿机械臂机构的主体均为空心管,其上设计有机械臂可变动部分连接件,可调整机械臂长度。
11.所述机械臂可变动部分连接件包括v型弹片,所述空心管上开有圆形定位孔,通过v型弹片与不同定位孔调整所述机械臂可变动部分的总体长度。
12.再进一步,所述足部结构上有圆弧形槽,小腿机械臂上固定的螺杆插入圆弧形槽中并沿着弧形槽运动,实现了足部结构的限位。
13.所述足部结构为一个踏板,上有软垫。
14.所述关节连接轴为阶梯轴,关节转动件的右侧为通孔,左侧有阶梯通孔。
15.优选的,所述关节轴根据直径分为三个梯度,从左到右直径分别为25mm,27mm,38mm,关节转动件的右侧为一直径为38mm的通孔。
16.本发明的有益效果主要表现在:1、在大小腿机械臂上都安装有电动推杆,实现大小腿机械臂相对独立的运动,满足康复时对大小腿弯曲角度不同的要求;踝关节结构采用机械结构进行限位;2、大小腿机械臂均采用v型弹片来实现长度的调整,可根据不同用户的大小腿长来调整机械臂的长度,提高舒适度,简化设计;3、踏板连接处开有圆弧形槽,螺栓只能在设定角度(例如80
°
)的槽内移动,实现限位,并且踏板上设有软垫,增加舒适度;4、靠背与座椅之间设计了电机,可通过电机相对转动,提高了舒适度。
附图说明
17.图1是本发明的椅式下肢运动康复机器人三维结构图。
18.图2是本发明的椅式下肢运动康复机器人膝关节局部剖视图。
19.图3是本发明的椅式下肢运动康复机器人机械臂可变动部分零件图。
20.图4是本发明的椅式下肢运动康复机器人踝关节连接处结构示意图。
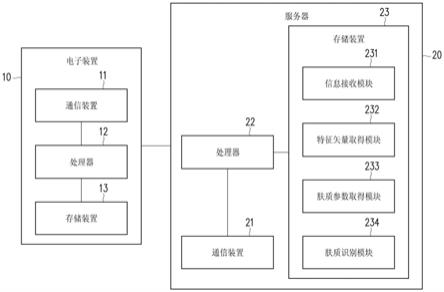
21.图5是本发明的椅式下肢运动康复机器人机架部分的结构图。
22.图中:1为靠背,2为座椅,3为电机,4为支撑柱,5为底座。
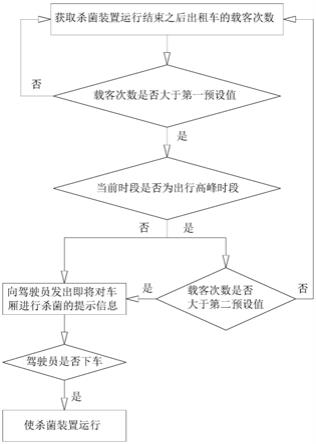
23.图6是本发明的椅式下肢运动康复机器人运动部分的结构图
24.图中:11为第一关节转动件,12为运动机构与机架固定结构,13为关节连接轴,14为大腿机械臂构件,15为机械臂可变动部分轴承连接件,16为大腿机械臂机构,17为电动推杆,18为v型弹片,19为小腿机械臂机构,110为足部结构,111为机身左右固定结构,112为定位连接件,113为电动推杆连接件,114为带动人体运动机构,115为端盖。
具体实施方式
25.下面结合附图对本发明作进一步描述。
26.参照图1~图6,一种椅式下肢运动康复机器人,包括运动部分、驱动部分和机架部分。
27.如图5,所述机架部分包括靠背1、座椅2、电机3、支撑柱4和底座5,靠背1与座椅2之间通过靠背电机3相对转动,实现靠背的倾斜,底座5与支撑柱4的下端采用螺栓连接,座椅2与支撑柱4的上端也采用螺栓连接,座椅2上留有与运动部分连接的区域。
28.所述驱动部分为大腿电动推杆14和小腿电动推杆17;
29.如图6,所述运动部分包括运动机构与机架固定结构12、关节连接轴13、机械臂可变动部分轴承连接件15、大腿机械臂机构16、v型弹片18、小腿机械臂机构19、足部结构110、机身左右固定结构111、定位连接件112和带动人体运动机构114,机身左右固定结构111和运动机构与机架固定结构12采用螺栓连接;大腿电动推杆14与大腿电动推杆连接件采用螺栓连接,大腿电动推杆连接件通过螺栓固定在大腿机械臂机构16上;第一关节转动件11与运动机构与机架固定结构12采用螺栓连接,大腿机械臂构件16的后端与第一关节转动件11通过关节连接轴13连接,关节连接轴13通过螺栓实现在第一关节转动件11中的轴向定位;连接大、小腿机械臂的第二关节转动件的一侧通过螺栓与大腿机械臂构件16连接,第二关节转动件的另一侧通过关节连接轴和定位连接件112连接,所述定位连接件112通过螺栓连接固定在小腿机械臂机构19上;小腿电动推杆与小腿电动推杆连接件采用螺栓连接,小腿电动推杆连接件通过螺栓固定在小腿机械臂机构19上,小腿机械臂机构19的中部与带动人体运动机构114采用螺栓连接,小腿机械臂构件19的下部与足部结构110采用螺栓连接。
30.所述足部结构110与小腿机械臂机构19的螺栓连接处设有端盖115。
31.所述运动机构与机架固定结构12上安装有大腿电动推杆14,采用大腿电动推杆连接件和大腿机械臂机构16连接,第一关节转动件11和大腿机械臂机构16通过关节连接轴13连接,大腿机械臂机构16和小腿机械臂机构19的主体均为空心管,其上设计有机械臂可变动部分轴承连接件15,可调整机械臂长度,具体结构如图3。两者仍采用关节连接轴连接和电动推杆驱动,小腿机械臂机构19上连有辅助小腿运动的带动人体运动机构114,小腿机械臂机构19端部通过螺栓与足部结构110相连,所述足部结构与小腿机械臂机构的螺栓连接处开有圆弧形槽,螺栓可移动地安装在圆弧形槽内实现限位,所述圆弧形槽上设有端盖115,如图4。足部结构为一个踏板,上有软垫;当电动推杆启动时,大腿电动推杆14和小腿电动推杆17分别带动大腿、小腿机械臂机构围绕关节连接轴旋转,患者的腿部在机构的带动下做一定角度的弯曲运动,起到康复的作用。
32.所述关节连接轴为阶梯轴,关节转动件的右侧为通孔,左侧有阶梯通孔。在关节处采用双边限位和阶梯轴配合使用,保证机械臂左右限位的同时也减小了弯矩。在选用电动推杆作为驱动装置时,由于电动推杆是从旁边通过力矩传递带动大小腿机械臂运动,会带来较大的弯矩,导致对轴有更高的强度要求,使得整体尺寸增大。所以采用双边限位来承担部分弯矩。同时,采用了阶梯轴,轴根据直径分为三个梯度,从左到右直径分别为25mm、27mm、38mm,关节转动件右侧为一直径为38mm的通孔,左侧有一阶梯通孔。通过这样的结构设计,关节轴就能直接从右边放入关节件中。设计的安装顺序如下:1.大小腿机械臂机构与轴承配合;2.关节件与轴套紧挨,轴套与大小腿部件紧挨;3.关节轴从右侧放入关节处,能与轴套和轴承配合。4.从左侧通过螺栓固定关节轴轴向。这样的设计能解决传统双边限位的轴安装问题,无需进行额外设计。
33.本实施例中,椅式下肢康复机器人的运动模式一般为4自由度的运动模式,一般采用一杆带一腿的机构设计,左右大小腿各有一根杆连接带动,在杆(大腿机械臂机构和小腿
机械臂机构)上开有定位孔,通过v型弹片18来控制杆的长度。
34.椅式下肢康复机器人的运动结构由运动部分,驱动部分,机架部分三部分组成。椅式下肢康复机器人的驱动部分采用直动电动推杆,直动电动推杆可以提供一定的支撑力,减少转动对轴的负荷。椅式下肢康复机器人的机架部分采用静止型机架,静止型机架相对于运动型机架的主要优势在于它结构简单,强度大,稳定性好,成本低,同时占用空间相对小。椅式下肢康复机器人的运动部分由运动机构与机架固定结构、关节连接轴、大腿机械臂机构、机械臂可变动部分轴承连接件、v型弹片、小腿机械臂机构、足部结构、定位连接件、大腿电动推杆连接件和小腿动推杆连接件组成。工作时,由电动推杆带动大腿小腿机械臂机构围绕关节轴旋转,通过带动人体运动机构带动人体运动,关节处采用转动件设计保证机械臂左右限位,机械臂的长度变化通过v型弹片与定位孔调节。
35.椅式下肢康复机器人的固定机架采用椅式设计,靠背与座椅之间通过靠背电机相对转动,实现靠背的倾斜,底座与支撑柱采用螺栓连接,座椅与支撑柱也采用螺栓连接,座椅的上留有与运动部分连接的空余。
36.为了完成基本的下肢康复运动,如直抬腿训练、屈曲膝关节训练、后屈曲膝关节训练等,下肢康复机器人要保证4自由度的运动模式,即保证两侧髋关节和膝关节的运动性能,同时左右的运动不会相互干涉。此外,踝关节也可以加上轴承增加两个自由度,保证患者的舒适性。
37.整个系统工作流程如下:
38.(1)开始大腿机械臂机构与地面保持水平,小腿机械臂机构与地面近乎垂直,等待患者进入机器人机构并坐稳。
39.(2)技术人员根据患者实际需求设计运动流程,将角度与电动推杆伸长长度调整合适,确定电动推杆长度与时间的关系,从而保证运动的稳定性。
40.(3)患者进入机器人坐稳后,电动推杆开始根据预定运动进行运动,开始康复流程。
41.运动模块的具体工作流程:由电动推杆带动大腿小腿机械臂机构围绕关节轴旋转,通过带动人体运动机构带动人体运动,关节处保证机械臂左右限位,机械臂的长度变化通过v型弹片与定位孔调节。
42.本说明书的实施例所述的内容仅仅是对发明构思的实现形式的列举,仅作说明用途。本发明的保护范围不应当被视为仅限于本实施例所陈述的具体形式,本发明的保护范围也及于本领域的普通技术人员根据本发明构思所能想到的等同技术手段。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。