技术特征:
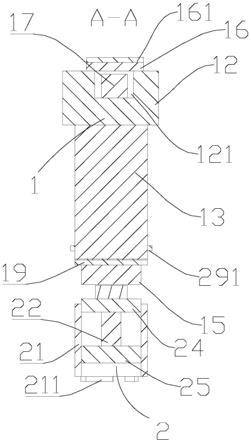
1.一种基于共振光束的高精度被动定位系统,其特征在于,该系统包括:定位基站:包括激励源、增益介质、用以测距的激光tof模块、作为回复反射器的第一猫眼以及设置在第一猫眼后部的用以进行aoa估计的cmos图像传感器,所述的第一猫眼由第一反射镜m1和第一薄透镜l1构成,所述的第一反射镜m1为具有部分反射率的反射镜,所述的增益介质设置在第一薄透镜l1的焦点处;定位目标:包括作为回复反射器的第二猫眼,所述的第二猫眼由第二反射镜m2和第二薄透镜l2构成,所述的第二反射镜m2为具有100%反射率的反射镜,所述的第一猫眼和第二猫眼之间形成实现共振光束往复传播的谐振腔。2.根据权利要求1所述的一种基于共振光束的高精度被动定位系统,其特征在于,所述的第一反射镜m1和第一薄透镜l1之间的距离大于和第一薄透镜l1的焦距,所述的第二反射镜m2和第二薄透镜l2之间的距离大于和第二薄透镜l2的焦距。3.根据权利要求1所述的一种基于共振光束的高精度被动定位系统,其特征在于,所述的cmos图像传感器与第一反射镜m1之间设有降低光束功率的衰减器att。4.根据权利要求1所述的一种基于共振光束的高精度被动定位系统,其特征在于,该系统分别独立通过aoa估计进行角度测量以及通过激光tof测距进行距离测量。5.根据权利要求4所述的一种基于共振光束的高精度被动定位系统,其特征在于,对于距离测量,采用脉冲激光tof方法进行测距,具体为:在激光tof模块中,电源驱动探测激光,探测激光通过系统视场内的发射望远镜传输,然后一小部分探测激光被两个反射镜反射后到达接收望远镜,这部分激光通过时间测量元件记录发射检测激光的时间t1,另一部分探测激光在空气中传输,然后被定位目标反射,反射光束通过接收望远镜接收,光束入射到光电元件上被转换为电信号,经过放大整形后,记录接收到反射光束经过空中传输和目标检测后的时间t2,则基站与目标之间的估计距离表示为:其中,c为激光束在空气中的传输速度。6.根据权利要求5所述的一种基于共振光束的高精度被动定位系统,其特征在于,当采用脉冲激光测距时,通过对脉冲数进行计数进行时间测量,在测距开始时,发射的参考脉冲进入定时器,当反射脉冲到达时,定时器停止,则基站与目标之间的估计距离表示为:其中,n
p
为捕捉到的脉冲个数,t0为定时器周期。7.根据权利要求6所述的一种基于共振光束的高精度被动定位系统,其特征在于,对于角度测量,当定位目标在y轴正方向上移动 δy距离时,在第一反射镜m1上的共振光束束斑位置从0变为
‑
δy
′
,则δy与
‑
δy
′
之间关系为:定位基站与定位目标之间的角度表示为:
其中,f为第一薄透镜l1的焦距,对于仅在y轴方向上的移动,此时定位目标在x轴上移动距离δx=0。8.根据权利要求1所述的一种基于共振光束的高精度被动定位系统,其特征在于,所述的定位基站和定位目标中的回复反射器还可以为角锥棱镜回复反射器或回复反射器阵列结构。9.根据权利要求1所述的一种基于共振光束的高精度被动定位系统,其特征在于,所述的谐振光束始终通过增益介质,激励源在定位目标改变位置时撞击在增益介质的同一点。10.根据权利要求1所述的一种基于共振光束的高精度被动定位系统,其特征在于,所述的第一薄透镜l1的反射率为99%。
技术总结
本发明涉及一种基于共振光束的高精度被动定位系统,该系统包括:定位基站:包括激励源、增益介质、用以测距的激光ToF模块、作为回复反射器的第一猫眼以及设置在第一猫眼后部的用以进行AoA估计的CMOS图像传感器,所述的第一猫眼由第一反射镜M1和第一薄透镜L1构成,所述的第一反射镜M1为具有部分反射率的反射镜,所述的增益介质设置在第一薄透镜L1的焦点处;定位目标:包括作为回复反射器的第二猫眼,所述的第二猫眼由第二反射镜M2和第二薄透镜L2构成,所述的第二反射镜M2为具有100%反射率的反射镜,所述的第一猫眼和第二猫眼之间形成实现共振光束往复传播的谐振腔。与现有技术相比,本发明具有无源高精度被动定位、传输效率高等优点。率高等优点。率高等优点。
技术研发人员:刘庆文 刘明清 徐梦圆 姜清伟 熊明亮 方稳
受保护的技术使用者:同济大学
技术研发日:2021.07.21
技术公布日:2021/10/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。