1.本发明涉及共振光定位领域,尤其是涉及一种基于共振光束的高精度被动定位系统。
背景技术:
2.在万物互联(ioe)时代,对于各种应用的高精度室内定位的需求正在迅速增加,例如自主机器人、虚拟现实(vr)和智能手机,如图(1a)所示,但是如图(1b)所示,现有的室内定位方案面临着几个挑战,在主动定位方案中,例如wifi、zigbee等,目标需要电源来发射信号,这可能很难或不可能提供;在无源定位方案中,如雷达、激光雷达等,基站采用波束导向控制瞄准目标接收足够的反射信号,通常需要复杂且昂贵的控制设备,此外,定位精度还受到环境辐射干扰的影响。
3.中国专利201910294606.3公开了一种基于分离腔的跟踪定位系统,通过腔内激光进行角度测量和距离测量,一部分腔内激光通过光感元件测角度,一部分腔内激光通过利用干涉测距原理进行测距,但是该系统发射端需要发射机处的转动电机和发射机、接收机处的通信模块实现定位,无法实现无源条件下的定位。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于共振光束的高精度被动定位系统。
5.本发明的目的可以通过以下技术方案来实现:
6.一种基于共振光束的高精度被动定位系统,该系统包括:
7.定位基站:包括激励源、增益介质、用以测距的激光tof模块、作为回复反射器的第一猫眼以及设置在第一猫眼后部的用以进行aoa估计的cmos图像传感器,所述的第一猫眼由第一反射镜m1和第一薄透镜l1构成,所述的第一反射镜m1为具有部分反射率的反射镜,所述的增益介质设置在第一薄透镜l1的焦点处;
8.定位目标:包括作为回复反射器的第二猫眼,所述的第二猫眼由第二反射镜m2和第二薄透镜l2构成,所述的第二反射镜m2为具有100%反射率的反射镜,所述的第一猫眼和第二猫眼之间形成实现共振光束往复传播的谐振腔。
9.所述的第一反射镜m1和第一薄透镜l1之间的距离大于和第一薄透镜l1的焦距,所述的第二反射镜m2和第二薄透镜l2之间的距离大于和第二薄透镜l2的焦距。
10.所述的cmos图像传感器与第一反射镜m1之间设有降低光束功率的衰减器att。
11.该系统分别独立通过aoa估计进行角度测量以及通过激光tof测距进行距离测量。
12.对于距离测量,采用脉冲激光tof方法进行测距,具体为:
13.在激光tof模块中,电源驱动探测激光,探测激光通过系统视场内的发射望远镜传输,然后一小部分探测激光被两个反射镜反射后到达接收望远镜,这部分激光通过时间测量元件记录发射检测激光的时间t1,另一部分探测激光在空气中传输,然后被定位目标反
射,反射光束通过接收望远镜接收,光束入射到光电元件上被转换为电信号,经过放大整形后,记录接收到反射光束经过空中传输和目标检测后的时间t2,则基站与目标之间的估计距离表示为:
[0014][0015]
其中,c为激光束在空气中的传输速度。
[0016]
当采用脉冲激光测距时,通过对脉冲数进行计数进行时间测量,在测距开始时,发射的参考脉冲进入定时器,当反射脉冲到达时,定时器停止,则基站与目标之间的估计距离表示为:
[0017][0018]
其中,n
p
为捕捉到的脉冲个数,t0为定时器周期。
[0019]
对于角度测量,当定位目标在y轴正方向上移动 δy距离时,在第一反射镜m1上的共振光束束斑位置从0变为
‑
δy
′
,则δy与
‑
δy
′
之间关系为:
[0020][0021]
定位基站与定位目标之间的角度表示为:
[0022][0023]
其中,f为第一薄透镜l1的焦距,对于仅在y轴方向上的移动,此时定位目标在x轴上移动距离δx=0。
[0024]
所述的定位基站和定位目标中的回复反射器还可以为角锥棱镜回复反射器或回复反射器阵列结构。
[0025]
所述的谐振光束始终通过增益介质,激励源在定位目标改变位置时撞击在增益介质的同一点。
[0026]
所述的第一薄透镜l1的反射率为99%。
[0027]
与现有技术相比,本发明具有以下优点:
[0028]
本发明利用共振光束实现了定位目标的高精度被动定位,既不需要来自目标的主动信号发射(例如,wifi/蓝牙定位),也不需要波束控制(例如,雷达/激光雷达),基于共振光系统(rbs)的窄波束传输、高信噪比(snr)和自对准特性,本发明可以实现高精度的无源定位,共振光系统中两个回复反射器共同形成一个谐振腔。
[0029]
并且该系统用于定位的共振光束本质是腔内激光,具有准直、窄波束传输、传输效率高的特点,为实现毫米级定位提供基础,利用双回复反射谐振腔和激光形成的原理,保证了系统的自对准特性,从而在定位目标不携带任何信号发射器的情况下,自动跟踪定位目标的位置,并从共振波束中提取出位置信息。
[0030]
本发明采用tof传感器进行测距,该传感器本身可以在一定视场角范围内进行毫米级精度的定位,因此,该系统能够在大视场角内实现毫米级精度的被动定位。
附图说明
[0031]
图1为rbp系统应用场景和原理及现有定位系统的对比,其中,图(1a)为rbp系统应用场景和原理,图(1b)为rbp系统与现有定位系统的对比图。
[0032]
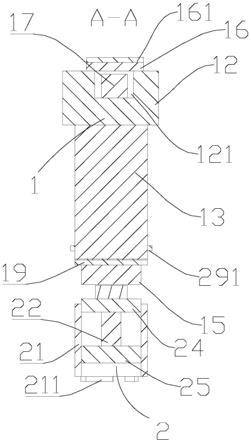
图2为基于共振光的高精度被动定位系统示意图。
[0033]
图3为tof模块测距结构及原理。
[0034]
图4为角度测量原理。
[0035]
图5为cmos上光斑随定位目标沿y轴移动0~24.48cm/39.53cm时的变化,其中,图(5a)为定位目标与定位基站相距1m时的变化,图(5b)为定位目标与定位基站相距2m时的变化。
[0036]
图6为tof定位误差随定位目标与定位基站之间距离的变化。
[0037]
图7为角度测量误差与定位目标和定位基站间角度之间的关系。
具体实施方式
[0038]
下面结合附图和具体实施例对本发明进行详细说明。
[0039]
本发明公开一种基于共振光束的高精度被动定位系统,该系统利用共振光束实现高精度被动定位,既不需要来自目标的主动信号发射(例如,wifi/蓝牙定位),也不需要波束控制控制(例如,雷达/激光雷达)。基于共振光系统(rbs)具有窄波束传输、高信噪比(snr)和自对准特性,谐振波束定位rbp可以实现高精度的无源定位。共振光系统中两个回复反射器共同形成一个谐振腔,谐振腔两端的两个回射器、泵浦源和增益介质是构成rbs的关键因素,泵浦源为产生光子的增益介质提供能量,在谐振腔内来回回射的光子多次通过增益介质被放大。一旦增益能够补偿光子传输的路径损耗,则会产生稳定的谐振光束。
[0040]
此外,如果基站或目标处的反射镜部分透射,则部分谐振光束通过反射镜形成激光器,因此,用于定位的共振光束本质是腔内激光,具有准直、窄波束传输、传输效率高的特点,为实现毫米级定位提供基础。双回复反射谐振腔和激光形成原理,保证了该系统的自对准特性,从而在定位目标不携带任何信号发射器的情况下,自动跟踪定位目标的位置,并从共振波束中提取出位置信息。
[0041]
本发明采用tof传感器进行测距,该传感器本身可以在一定视场角范围内进行毫米级精度的定位,因此,本发明的rbp系统,可以在大视场角内实现毫米级精度的被动定位,本发明基于rbs的原理,提供谐振波束定位实现距离测量、角度测量功能的具体方案。
[0042]
以下内容首先整体介绍基于共振光的高精度被动定位系统构成原理,然后分别介绍距离测量、角度测量等功能的具体实现方案。
[0043]
a、基于共振光的高精度被动定位系统
[0044]
本发明公开的rbp系统采用激光tof模块进行测距,并利用基站和目标之间产生的谐振光束进行aoa估计,系统架构继承了rbs和激光tof模块,便于无波束控制的被动定位特性。
[0045]
本发明的系统结构如图2所示,rbp的定位基站由增益介质、带有第一反射镜m1和第一薄透镜l1的第一猫眼、光束功率衰减器att、cmos图像传感器和激光tof模块组成,而定位目标由第二猫眼组成,包括第二反射镜m2和第二薄透镜l2。增益介质放置在l1的焦点处,因此谐振光束将始终通过增益介质,作为激励源的泵浦激光在定位目标改变位置时撞击在
同一点,m1具有部分反射率(即99%),部分谐振光束输出为激光束,激光束撞击cmos以进行aoa估计。由于cmos在将光束功率转换为光电流的过程中具有饱和的入射光强度,因此在第一反射镜m1后面放置了一个衰减器att,使得光束功率在入射到cmos之前降低,而定位目标的第二反射镜m2具有100%反射率,可将更多功率反射到发射器,从而实现高定位精度。
[0046]
本发明公开的rbp系统,由于rbs的结构,m1上谐振束斑的位置可以反映目标的位置。因此,可以通过m1在cmos上的激光束光斑质心计算得出目标相对于基站的角度。此外,激光tof模块是集成在定位基站发射器中的独立模块,低功率激光从特定视场内的点光源发射,然后高反射率的目标接收到激光并将激光反射回tof模块进行测距。
[0047]
本发明公开的rbp系统,定位目标只是嵌入了猫眼回复反射器,没有任何辅助电子系统。因此,所提出的基于谐振腔的定位系统可以同时实现高精度和被动定位。此外,由于aoa估计和tof测距是独立实现的,在下面说明定位原理,模拟定位过程,并分别分析角度估计和测距的定位精度。
[0048]
本发明公开的一种基于保护光的无线光学充电安全控制系统,由于共振光束是腔内光束,当有异物(人的手等)入侵到腔内,将会破坏共振光束的形成条件,共振光束将自动中断,因此该系统具有一定的安全特性。
[0049]
b、测距方案
[0050]
本发明公开的rbp系统,采用脉冲激光tof方案进行测距。如图3所示,在激光tof传感器中,电源首先驱动激光,激光通过系统视场内的发射望远镜传输。然后一小部分激光被两个反射镜(m3和m4)反射,然后到达接收望远镜。这部分激光通过时间测量元件,用于记录发射检测激光t1的时间。另一部分探测激光在空气中传输,然后被具有高反射率的目标反射。反射光束通过接收望远镜。接下来,光束入射到光电元件上以被转换为电信号。信号经过放大整形后,准备记录接收到反射光束t2经过空中传输和目标检测后的时间。因此,基站与目标之间的估计距离可以表示为:
[0051][0052]
其中c是激光束在空气中的传输速度。对于脉冲激光测距系统,时间测量是通过对脉冲数进行计数来完成的。在测距开始时,发射的参考脉冲进入定时器,当反射脉冲到达时,定时器停止。假设上述过程中捕捉到n
p
个脉冲,定时器周期为t0,上式可重新定义为:
[0053][0054]
c、角度测量方案
[0055]
本发明公开的rbp系统中,为了获得用于aoa估计的cmos上的光束光斑,可以首先计算m1上的共振光束强度分布。根据衍射理论和自再现模理论,可以模拟光束在共振腔内的传输过程,最终可以得到共振腔内任意平面的光束强度分布。由于所提出的系统在收发器处采用了两个回射器,因此仍然可以随着目标的移动而产生共振光束,并且光束点的位置会发生变化。下面将通过精确模拟共振腔内的光束传输来表达aoa估计的原理。
[0056]
本发明公开的rbp系统中,采用了一种特殊的猫眼结构作为回复反射器。如图4中的(a)部分所示,采用的猫眼包含一面反射镜和一个焦距为f的薄透镜,一般来说,在一般猫眼结构中,反射镜和薄透镜之间的距离是相等的,来自任何入射方向的光束都可以沿原始
方向反射回来。然而,采用l>f的猫眼结构可以在确保回射的同时实现光束聚焦。该结构相当于一个具有回复反射能力的凹面镜,凹面镜保证了谐振腔的稳定性比一般猫眼等效的平面镜构成的谐振腔稳定性更高。
[0057]
因此,如图4中的(b)部分所示,由上述两个猫眼形成的共振腔具有更高的稳定性,此外,由于两只猫眼并不完全面对面,因此共振光束可以在共振腔内回射,并且镜面上的光斑位置会随着接收器的移动而变化,为简单起见,在下面只分析接收器沿y轴的移动,因为沿x轴的移动以相同的方式计算。如4中的(b)部分所示所示,定义接收器(定位目标)沿y轴正方向移动为 δy,l2和m2上的共振光斑位置理论上从0变为 δy,而m1上的束斑位置从0变为
‑
δy
′
,束场分布为u(x,y),这里目标相对于基站的角度表示为θ,然后,来自左侧第一反射镜m1的输出光束以光束强度分布撞击cmos。因此,首先获得共振腔中m1上的共振束场分布u(x,y)。
[0058]
基于衍射积分理论,如图4中的(c)部分所示,给定m1处的初始场分布u0(x,y),光束场随着穿过第一反射镜、第一薄透镜、增益介质、第二反射镜和第二薄透镜之间的自由空间、增益介质和透镜之间的自由空间、空中进行传输,可以相应地表示为t
m
(u0),t
l
(u0),t
g
(u0),t
fs
(u0,l),t
fs
(u0,f)和t
fs
(u0,d f),然后,在谐振腔中的往返传输后,m1上的束场分布变为u1(x,y):
[0059]
u1=t
round
(u0)
[0060]
=t
m
t
fs
t
l
t
fs
t
g
t
fs
t
l
t
fs
t
m
…
t
fs
t
l
t
fs
t
g
t
fs
t
l
t
fs
t
m
(u0).
[0061]
根据自再现模理论,在谐振腔内来回反射的束场的传输过程可以等效为共振光束穿过一组孔径,每次通过孔径时,光束场的幅度和相位都会发生变化,多次传输后,光束场的横向分布保持不变,这意味着谐振腔形成了稳定的自在现模式,然后,稳定的共振光束光斑出现在谐振腔中的每个元件上。
[0062]
如图4中的(d)部分所示,上面的过程可以根据fox
‑
li算法在数学上表示为:给定一个任意的初始场分布(这里选择u0(x,y)=1),经过一次往返传输后会变为u1(x,y),经过t次迭代,最终成为稳定的自在现模式。那么u
t
(x,y)的束场横向分布与u
t 1
(x,y)相同,且两个波束场之间仅发生幅度衰减和相位滞后。通常,当两个场分布u
t 1
和u
t
之间的差异的标准偏差小于10
‑4时,迭代停止。
[0063]
实施例
[0064]
本发明公开的为基于共振光的高精度被动定位系统,角度测量部分采用共振光束系统(rbs),由于共振光束充电的物理原理,可以提供一定的被动安全性。其中光路控制器用于控制不同光路上谐振光束的通断。
[0065]
本发明公开的基于共振光的高精度被动定位系统,定位基站和定位目标中的回复反射器设置为猫眼回复反射器,但实际应用中可以选择角锥棱镜回复反射器或其他回复反射器或回复反射器阵列结构。发射端集成光电元件cmos,用于捕获光斑位置推导出定位目标的角度,实际应用中cmos可用ccd或其他可捕获光斑位置的光电元件替代。发射端集成激光脉冲tof传感器进行定位目标的距离测量,实际应用中tof测距可用计算到达时间(toa)、到达时间差(tdoa)、到达相位(poa)、接收信号强度(rss)等其他测距算法替代,实现一定视场角内的目标距离测量。
[0066]
本发明公开的基于共振光的高精度被动定位系统,tof距离测量及cmos角度测量
存在误差,给定下表中的参数,可以给出示例系统的定位精度:
[0067]
表1示例系统的参数
[0068][0069][0070]
图5分别为定位目标与定位基站相距1m/2m时,cmos上光斑随定位目标沿y轴移动0~24.48cm/39.53cm时的变化.
[0071]
图6为tof定位误差随定位目标与定位基站之间距离的变化(r0为时钟分辨率,τ为激光信号的波前)。
[0072]
图7为定位目标与定位基站之间距为2m,系统泵浦功率200w时,角度测量误差与定位目标和定位基站间角度之间的关系。
[0073]
因此,示例系统可在2m距离,16
°
视场角下实现定位目标的毫米级三维位置坐标获取,实现高精度被动定位。
[0074]
综上,本发明的基于共振光的高精度被动定位系统,定位基站包含一个回复反射器、一个用于激发共振光束的增益介质和一个传感元件,定位目标仅包括一个回复反射器,可见定位目标是一种不需要电源的无源设备。回复反射器可采用猫眼型逆反射器或角锥棱镜回复反射器或前述回复反射器组成的阵列结构,当目标改变其相对于基站的角度时,回复反射器上共振束光斑的位置也会发生变化,因此,可以通过获得回复反射器上共振光束光斑的位置来估计目标与定位基站之间的角度,基站中使用互补金属氧化物半导体(cmos)图像传感器来捕获相对应的光斑位置,并采用与到达角(aoa)算法估算角度,另外该系统还集成了一个激光飞行时间(tof)模块来估计基站和目标之间的距离,因此,配合角度估计可以精确获取定位目标的三维位置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。