技术特征:
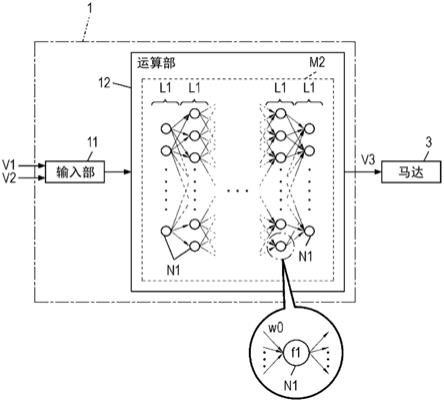
1.一种马达控制方法,将表示马达的状态的1个以上的控制量或目标值作为输入值输入到1个以上的节点层,通过在所述1个以上的节点层的各节点层中进行运算,来输出用于控制所述马达的1个以上的操作量,根据所述1个以上的操作量来对所述马达进行控制,其中,所述1个以上的节点层分别具有并行地执行运算的多个节点,所述多个节点中的每个节点将所述输入值与针对每个节点规定的系数相乘,通过针对每个节点规定的将相乘后的值作为输入变量的函数来进行运算,由此决定输出值。2.根据权利要求1所述的马达控制方法,其中,所述1个以上的节点层中的至少1个节点层所具有的节点将所述1个以上的节点层中的其它节点的过去的输出值作为输入值。3.根据权利要求1或2所述的马达控制方法,其中,所述函数为非线性函数。4.根据权利要求1~3中的任一项所述的马达控制方法,其中,所述1个以上的控制量至少包含所述马达的位置信息。5.一种马达的控制模型的变换方法,用于将第1运算模型变换为第2运算模型,其中,所述第1运算模型将表示所述马达的状态的1个以上的控制量或目标值作为输入,通过使用了1个以上的传递函数或状态方程式的运算,来输出用于控制所述马达的1个以上的操作量,所述第2运算模型将所述1个以上的控制量或目标值作为输入,在1个以上的节点层的各节点层中进行运算来输出所述1个以上的操作量,所述1个以上的节点层分别具有并行地执行运算的多个节点,在将所述第1运算模型变换为所述第2运算模型的过程中,针对所述多个节点中的各个节点,基于所述1个以上的传递函数或状态方程式来决定与输入到所述节点的输入值相乘的系数以及将相乘后的值作为输入变量的函数。6.根据权利要求5所述的马达的控制模型的变换方法,其中,在将所述第1运算模型变换为所述第2运算模型的过程中,基于所述第1运算模型中的所述1个以上的传递函数或状态方程式的过去的状态的个数、以及所述输入与所述输出的连接关系,来决定所述多个节点的个数和所述多个节点各自的所述系数。7.一种马达控制系统,具备:输入部,表示马达的状态的1个以上的控制量或目标值作为输入值被输入到该输入部;以及运算部,其包括1个以上的节点层,所述1个以上的节点层分别具有并行地执行运算的多个节点,所述运算部通过基于所述输入值进行运算,来输出用于控制所述马达的1个以上的操作量,其中,所述多个节点中的每个节点将所述输入值与针对每个节点规定的系数相乘,通过针对每个节点规定的将相乘后的值作为输入变量的函数来进行运算。8.一种马达的控制模型的变换系统,具备:模型输入部,其被输入第1运算模型;以及变换部,其将所述第1运算模型变换为第2运算模型并输出该第2运算模型,
其中,所述第1运算模型将表示马达的状态的1个以上的控制量或目标值作为输入,通过使用了1个以上的传递函数或状态方程式的运算,来输出用于控制所述马达的1个以上的操作量,所述第2运算模型将所述1个以上的控制量或目标值作为输入,在1个以上的节点层的各节点层中进行运算来输出所述1个以上的操作量,所述1个以上的节点层分别具有并行地执行运算的多个节点,所述变换部在将所述第1运算模型变换为所述第2运算模型的过程中,针对所述多个节点中的各个节点,基于所述1个以上的传递函数或状态方程式来决定与输入到节点的输入值相乘的系数以及将相乘后的值作为输入变量的函数。9.根据权利要求8所述的马达的控制模型的变换系统,其中,所述变换部在将所述第1运算模型变换为所述第2运算模型的过程中,基于所述第1运算模型中的所述1个以上的传递函数或状态方程式的过去的状态的个数、以及输入与输出的连接关系,来决定所述多个节点的个数和所述多个节点各自的所述系数。10.一种马达的控制模型的变换程序,是用于使1个以上的处理器执行将第1运算模型变换为第2运算模型的变换处理的变换程序,其中,所述第1运算模型将表示马达的状态的1个以上的控制量或目标值作为输入,通过使用了1个以上的传递函数或状态方程式的运算,来输出用于控制所述马达的1个以上的操作量,所述第2运算模型将所述1个以上的控制量或目标值作为输入,在1个以上的节点层的各节点层中进行运算来输出所述1个以上的操作量,所述1个以上的节点层分别具有并行地执行运算的多个节点,所述变换处理包括以下处理:在将所述第1运算模型变换为所述第2运算模型的过程中,针对所述多个节点中的各个节点,基于所述1个以上的传递函数或状态方程式来决定与输入到节点的输入值相乘的系数以及将相乘后的值作为输入变量的函数。11.根据权利要求10所述的马达的控制模型的变换程序,其中,所述变换处理包括以下处理:在将所述第1运算模型变换为所述第2运算模型的过程中,基于所述第1运算模型中的所述1个以上的传递函数或状态方程式的过去的状态的个数、以及输入与输出的连接关系,来决定所述多个节点的个数和所述多个节点各自的所述系数。
技术总结
在马达控制方法中,将表示马达的状态的1个以上的控制量或目标值作为输入值输入到1个以上的节点层,通过在1个以上的节点层的各节点层中进行运算,来输出用于控制马达的1个以上的操作量,根据1个以上的操作量来对马达进行控制。1个以上的节点层分别具有并行地执行运算的多个节点。多个节点中的每个节点将输入值与针对每个节点规定的系数相乘,通过针对每个节点规定的将相乘后的值作为输入变量的函数来进行运算,由此决定输出值。由此决定输出值。由此决定输出值。
技术研发人员:铃木健一
受保护的技术使用者:松下知识产权经营株式会社
技术研发日:2020.01.06
技术公布日:2021/10/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。