1.本发明属于航天器姿态控制领域,特别涉及一种兼顾机动控制与稳定控制 的挠性卫星姿态控制器及方法。
背景技术:
2.卫星在轨姿态控制任务通常包括两种:大角度的姿态机动控制和固定姿态 (通常是零姿态)附近的姿态稳定控制。这两种控制的要求各有侧重:姿态机 动控制强调过程的快速性和平稳性;姿态稳定控制强调固定姿态附近的稳态精 度和姿态稳定度。由于任务要求和内在特点的不同,很难用一种结构固定、参 数固定的控制律完成这两种控制任务。目前工程上最常用的做法是:一种控制 结构、两套控制参数。对于带有挠性部件的卫星(简称挠性卫星),控制结构多 采用比例积分微分(pid) 结构滤波器形式,用两套不同的pid参数来适应这 两种控制任务。这种做法的缺点是:参数切换过程中姿态不够平稳;大角度姿 态机动需要配合机动规划来实施,且机动前后往往存在较大的姿态超调。
技术实现要素:
3.本发明解决的技术问题是:克服现有技术的不足,提出一种兼顾机动控制 与稳定控制的挠性卫星姿态控制器及方法,实现了在大角度姿态机动时无需额 外的机动路径规划,可以直接用目标姿态进行控制,并且在不延长机动时间的 前提下有效确保姿态的平稳性。
4.本发明解决技术的方案是:
5.本发明实施例提供一种兼顾机动控制与稳定控制的挠性卫星姿态控制器, 包括:
6.调度逻辑模块,用于接收外部上层模块传来的目标姿态角θ
r
和任务类型信 息;当判定任务类型为姿态调节控制时,将目标姿态角θ
r
发送至第一控制器, 并置第二控制器的控制量为0,当判定所述任务类型为姿态机动控制时,则将 目标姿态角θ
r
发送至跟踪微分器,并置第一控制器的控制量为0;
7.跟踪微分器,用于对θ
r
做非线性跟踪微分处理,生成跟踪姿态θ
td
和跟踪姿 态微分ω
td
,将跟踪姿态θ
td
发送至单神经元分流模块,将跟踪姿态微分ω
td
发送至 第二控制器;
8.单神经元分流模块,用于接收外部敏感器传来的外部挠性卫星的姿态角测 量值θ,用θ
td
减去θ得到姿态误差e,根据所述姿态误差e计算得到快速平滑的 姿态误差信号ξ,将ξ发送至第二控制器;
9.第二控制器,用于接收所述外部敏感器传来的所述外部挠性卫星的角速度 测量值ω,用跟踪姿态微分ω
td
减去ω得到角速度误差e
ω
;对ξ和e
ω
依次进行比 例、积分、微分处理,生成第一比例积分微分pid控制量,将所述第一pid控 制量发送至所述第二结构滤波器;
10.第二结构滤波器,用于对所述第一pid控制量进二阶滤波处理,生成滤波 后第一控制量,发送给外部执行器,以使所述执行器对挠性卫星进行控制;
11.第一控制器,用于接收所述外部敏感器传来的姿态角测量值θ和角速度测 量值ω,用目标姿态角θ
r
减去θ得到姿态误差θ
r
‑
θ;角速度误差为
‑
ω;对姿态 误差θ
r
‑
θ和角速度误差
‑
ω依次做比例、积分、微分处理,生成第二pid控制量, 将所述第二pid控制量发送至所述第一结构滤波器;
12.第一结构滤波器,用于对第二pid控制量进二阶滤波处理,生成滤波后第 二控制量,发送给外部执行器,以使所述执行器对挠性卫星进行控制。
13.本发明实施例提供一种兼顾机动控制与稳定控制的挠性卫星姿态控制方 法,包括如下步骤:
14.调度逻辑模块接收外部上层模块传来的目标姿态角θ
r
和任务类型信息;当 判定任务类型为姿态调节控制时,将目标姿态角θ
r
发送至第一控制器,并置第 二控制器的控制量为0;当判定所述任务类型为姿态机动控制时,则将目标姿 态角θ
r
发送至跟踪微分器,并置第一控制器的控制量为0;
15.跟踪微分器对θ
r
做非线性跟踪微分处理,生成跟踪姿态θ
td
和跟踪姿态微分 ω
td
,将跟踪姿态θ
td
发送至单神经元分流模块,将跟踪姿态微分ω
td
发送至第二控 制器;
16.单神经元分流模块接收外部敏感器传来的外部挠性卫星的姿态角测量值 θ;用θ
td
减去θ得到姿态误差e,根据所述姿态误差e计算得到快速平滑的姿态 误差信号ξ,将ξ发送至第二控制器;
17.第二控制器接收外部敏感器传来的外部挠性卫星的角速度测量值ω,用跟 踪姿态微分ω
td
减去ω得到角速度误差e
ω
;对ξ和e
ω
依次进行比例、积分、微分 处理,生成第一pid控制量,将第一pid控制量发送至第二结构滤波器;
18.第二结构滤波器对第一pid控制量进二阶滤波处理,生成滤波后第一控制 量,发送给外部执行器,以使所述执行器对挠性卫星进行控制;
19.第一控制器接收外部敏感器传来的所述姿态角测量值θ和角速度测量值ω; 用目标姿态角θ
r
减去θ得到姿态误差θ
r
‑
θ;角速度误差为
‑
ω;对姿态误差θ
r
‑
θ和 角速度误差
‑
ω依次做比例、积分、微分处理,生成第二pid控制量,将所述第 二pid控制量发送至第一结构滤波器;
20.第一结构滤波器对第二pid控制量进二阶滤波处理,生成滤波后第二控制 量,发送给外部执行器,以使所述执行器对挠性卫星进行控制。
21.本发明与现有技术相比的有益效果是:利用本发明实施例提供的技术方案, 调度逻辑模块先判断任务类型是属于姿态调节控制还是属于姿态机动控制。若 属于姿态调节控制,则将目标姿态角θ
r
发送至第一控制器,使其根据目标姿态 角θ
r
及外部挠性卫星的姿态角测量值θ和角速度测量值ω进行后续计算得到第 二控制量以对挠性卫星进行控制,同时将第二控制器的控制量置为0。同理, 若属于姿态机动控制,则将目标姿态角θ
r
发送至跟踪微分器,利用第二控制器 和第二结构滤波器进行后续计算得到第一控制量,以对挠性卫星进行控制。利 用本发明的完整的控制器系统,兼顾了姿态机动控制与姿态稳定控制这两方面 的需求。因此在大角度姿态机动时无需额外的机动路径规划,可以直接用目标 姿态进行控制,并且在不延长机动时间的前提下改善姿态平稳性。此外,本发 明综合控制效果良好,在压缩过渡过程时间和减小姿态超调量两方面可以取得 较好的均衡。
附图说明
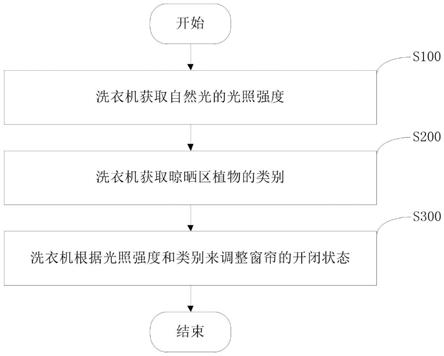
22.图1为本发明挠性卫星姿态控制器示意图;
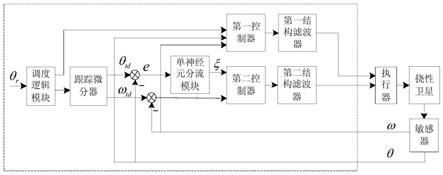
23.图2为本发明实施例提供的一种兼顾机动控制与稳定控制的挠性卫星姿态 控制方法的流程示意图。
具体实施方式
24.下面结合实施例对本发明作进一步阐述。
25.针对目前工程上用一种控制结构、两套控制参数来应对姿态机动控制和姿 态稳定控制任务时存在的缺点,本发明提出了一种以兼顾姿态机动控制与姿态 稳定控制为目标,将非线性跟踪微分器和单神经元分流模块联合使用以实现压 缩过渡过程并减小姿态超调量的控制方法。与现有方法相比,本方法在大角度 姿态机动时无需额外的机动路径规划,而可以直接用目标姿态进行控制,并且 在不延长机动时间的前提下可有效确保姿态的平稳性。
26.挠性卫星姿态控制器,包括:调度逻辑模块、跟踪微分器、单神经元分流 模块、第一控制器、第一结构滤波器、第二控制器和第二结构滤波器;具体如 图1所示。
27.本发明虽然设计了2个结构相同的控制器,都采用pid控制律 结构滤波 器的形式。但两套控制器的具体参数不同。第一控制器用于执行常规的姿态调 节控制任务,按照低带宽原则进行参数设计。第二控制器用于执行姿态机动控 制任务,按照高带宽原则进行参数设计。
28.调度逻辑模块,用于接收外部上层模块传来的目标姿态角θ
r
和任务类型信 息;当判定任务类型为姿态调节控制时,将目标姿态角θ
r
发送至第一控制器, 并置第二控制器的控制量为0,当判定所述任务类型为姿态机动控制时,则将 目标姿态角θ
r
发送至跟踪微分器,并置第一控制器的控制量为0;
29.跟踪微分器,用于对θ
r
做非线性跟踪微分处理,生成跟踪姿态θ
td
和跟踪姿 态微分ω
td
,将跟踪姿态θ
td
发送至单神经元分流模块,将跟踪姿态微分ω
td
发送至 第二控制器。跟踪微分器的非线性离散方程为:
[0030][0031]
式中,θ
r
为系统设定值;
[0032]
θ
td
为输出的预设姿态;
[0033]
h为离散计算步长;
[0034]
ω
td
为预设姿态θ
td
的微分;
[0035]
e
r
(k)输入误差;
[0036]
r为过渡过程的时间尺度;
[0037]
h0为计算步长;
[0038]
f_td(x1,x2,r,h0)为非线性函数;f_td(x1,x2,r,h0)的表达式为:
[0039][0040]
式中,a为临时变量。
[0041]
尽管跟踪微分器给出的预设姿态是平滑的,但反馈的输出信号仍然可能有较 大波动并可能激发挠性模态的振动,为此设计单神经元分流模块环节,用于对 姿态误差信号进一步快速平滑。
[0042]
神经元分流模型是一种简化的生物神经元动力学模型,具有结构简单、计 算量小、模型稳定、输出光滑且有界、增益自调整等特点,将其引入姿态误差 信号的自适应平滑处理中是很合适的。
[0043]
单神经元分流模块,用于接收外部敏感器传来的外部挠性卫星的姿态角测 量值θ,用θ
td
减去θ得到姿态误差e,根据所述姿态误差e计算得到快速平滑的 姿态误差信号ξ,将ξ发送至第二控制器。单神经元分流模块的计算公式为:
[0044]
e(k)=θ
td
(k)
‑
θ(k)
[0045]
ξ(k 1)=ξ(k) h{
‑
aξ(k) [b
‑
ξ(k)]s
e
(e(k))
‑
[d ξ(k)]s
i
(e(k))}
[0046]
式中,e(k)为姿态控制误差;
[0047]
θ
td
为输出的预设姿态;
[0048]
θ(k)为当前姿态角测量值;
[0049]
h为离散计算步长;
[0050]
a为衰减率;
[0051]
b为输出信号的上界;
[0052]
d为输出信号的下界;
[0053]
s
e
(e(k))为兴奋输入;s
e
(e(k))的计算方法为:
[0054]
s
e
(e(k))=max{e(k),0}
[0055]
s
i
(e(k))为抑制输入;s
i
(e(k))的计算方法为:
[0056]
s
i
(e(k))=max{
‑
e(k),0}。
[0057]
ξ(k)为模型输出。
[0058]
第二控制器,用于接收所述外部敏感器传来的所述外部挠性卫星的角速度 测量值ω,用跟踪姿态微分ω
td
减去ω得到角速度误差e
ω
;对ξ和e
ω
依次进行比 例、积分、微分处理,生成第一比例积分微分pid控制量,将所述第一pid控 制量发送至所述第二结构滤波器。
[0059]
第二结构滤波器,用于对所述第一pid控制量进二阶滤波处理,生成滤波 后第一控制量,发送给外部执行器,以使所述执行器对挠性卫星进行控制。
[0060]
第一控制器,用于接收所述外部敏感器传来的姿态角测量值θ和角速度测 量值
ω,用目标姿态角θ
r
减去θ得到姿态误差θ
r
‑
θ;角速度误差为
‑
ω;对姿态 误差θ
r
‑
θ和角速度误差
‑
ω依次做比例、积分、微分处理,生成第二pid控制量, 将所述第二pid控制量发送至所述第一结构滤波器。第一控制器和第二控制器 均采用pid控制律 结构滤波器形式;其中,pid控制律u
pid
(k)的计算方法为:
[0061][0062]
式中,k为当前时刻的时间序列序号;
[0063]
e(k)为姿态控制误差;
[0064]
e
d
(k)为角速度控制误差;
[0065]
k
p
为第一控制参数;
[0066]
k
i
为第二控制参数;
[0067]
k
d
为第三控制参数;
[0068]
所述第一控制器和第二控制器均采用二阶滤波器结构,传递函数为:
[0069][0070]
式中,s拉普拉斯算子;
[0071]
ω
z
为滤波器零点的角频率;
[0072]
ω
p
为滤波器极点的角频率;
[0073]
ζ
z
滤波器零点的阻尼比;
[0074]
ζ
p
为滤波器极点的阻尼比。
[0075]
第一结构滤波器,用于对第二pid控制量进二阶滤波处理,生成滤波后第 二控制量,发送给外部执行器,以使所述执行器对挠性卫星进行控制。
[0076]
在本发明一实施例中,该姿态控制器与外部敏感器进行交互。该外部敏感 期实现对外部挠性卫星姿态角和角速度的测量,获得姿态角测量值θ和角速度 测量值ω并发送给姿态控制器。
[0077]
本发明设计了可动态切换的两套控制律,由调度逻辑进行自动切换;设计 离散型非线性跟踪微分器在线安排过渡过程,以解决快速性与超调之间的矛盾; 设计单神经元分流模块环节,利用其控制增益的在线自动调整能力实现对姿态 误差信号进一步快速平滑,从而达到压缩过渡过程时间的同时减小姿态超调量 的目标。
[0078]
图2为本发明实施例提供的一种兼顾机动控制与稳定控制的挠性卫星姿态 控制方法的流程示意图。如图2所示,该方法具体包括如下步骤:
[0079]
步骤201,调度逻辑模块接收外部上层模块传来的目标姿态角θ
r
和任务类 型信息;当判定任务类型为姿态调节控制时,将目标姿态角θ
r
发送至第一控制 器,并置第二控制器的控制量为0,执行步骤206;当判定所述任务类型为姿 态机动控制时,则将目标姿态角θ
r
发送至跟踪微分器,并置第一控制器的控制 量为0,执行步骤202。第一控制器和第二控制器均采用pid控制律 结构滤波 器形式;其中,pid控制律u
pid
(k)的计算方法为:
[0080]
[0081]
式中,k为当前时刻的时间序列序号;
[0082]
e(k)为姿态控制误差;
[0083]
e
d
(k)为角速度控制误差;
[0084]
k
p
为第一控制参数;
[0085]
k
i
为第二控制参数;
[0086]
k
d
为第三控制参数;
[0087]
第一控制器和第二控制器均采用二阶滤波器结构,传递函数为:
[0088][0089]
式中,s拉普拉斯算子;
[0090]
ω
z
为滤波器零点的角频率;
[0091]
ω
p
为滤波器极点的角频率;
[0092]
ζ
z
滤波器零点的阻尼比;
[0093]
ζ
p
为滤波器极点的阻尼比。
[0094]
步骤202,跟踪微分器对θ
r
做非线性跟踪微分处理,生成跟踪姿态θ
td
和跟 踪姿态微分ω
td
,将跟踪姿态θ
td
发送至单神经元分流模块,将跟踪姿态微分ω
td
发 送至第二控制器。
[0095]
步骤203,单神经元分流模块接收外部敏感器传来的外部挠性卫星的姿态 角测量值θ;用θ
td
减去θ得到姿态误差e,根据所述姿态误差e计算得到快速平 滑的姿态误差信号ξ,将ξ发送至第二控制器。跟踪微分器的非线性离散方程为:
[0096][0097]
式中,θ
r
为系统设定值;
[0098]
θ
td
为输出的预设姿态;
[0099]
h为离散计算步长;
[0100]
ω
td
为预设姿态θ
td
的微分;
[0101]
e
r
(k)输入误差;
[0102]
r为过渡过程的时间尺度;
[0103]
h0为计算步长;
[0104]
f_td(x1,x2,r,h0)为非线性函数;
[0105]
非线性函数f_td(x1,x2,r,h0)的表达式为:
[0106][0107]
式中,a为临时变量;
[0108]
所述单神经元分流模块的计算公式为:
[0109]
e(k)=θ
td
(k)
‑
θ(k)
[0110]
ξ(k 1)=ξ(k) h{
‑
aξ(k) [b
‑
ξ(k)]s
e
(e(k))
‑
[d ξ(k)]s
i
(e(k))}
[0111]
式中,e(k)为姿态控制误差;
[0112]
θ
td
为输出的预设姿态;
[0113]
θ(k)为当前姿态角测量值;
[0114]
h为离散计算步长;
[0115]
a为衰减率;
[0116]
b为输出信号的上界;
[0117]
d为输出信号的下界;
[0118]
s
e
(e(k))为兴奋输入;s
e
(e(k))=max{e(k),0};
[0119]
s
i
(e(k))为抑制输入;s
i
(e(k))=max{
‑
e(k),0};
[0120]
ξ(k)为模型输出。
[0121]
步骤204,第二控制器接收外部敏感器传来的外部挠性卫星的角速度测量 值ω,用跟踪姿态微分ω
td
减去ω得到角速度误差e
ω
;对ξ和e
ω
依次进行比例、 积分、微分处理,生成第一pid控制量,将第一pid控制量发送至第二结构滤 波器。
[0122]
步骤205,第二结构滤波器对第一pid控制量进二阶滤波处理,生成滤波 后第一控制量,发送给外部执行器,以使所述执行器对挠性卫星进行控制。
[0123]
步骤206,第一控制器接收外部敏感器传来的所述姿态角测量值θ和角速度 测量值ω;用目标姿态角θ
r
减去θ得到姿态误差θ
r
‑
θ;角速度误差为
‑
ω;对姿 态误差θ
r
‑
θ和角速度误差
‑
ω依次做比例、积分、微分处理,生成第二pid控制 量,将所述第二pid控制量发送至第一结构滤波器。
[0124]
步骤哦207,第一结构滤波器对第二pid控制量进二阶滤波处理,生成滤 波后第二控制量,发送给外部执行器,以使所述执行器对挠性卫星进行控制。
[0125]
在本发明一实施例中,以滚动轴为例进行阐述。假设卫星滚动轴惯量为 5000kg
·
m2,正常工作模式,姿态调节时用飞轮执行姿态控制任务(飞轮最大 力矩0.1nm),姿态机动时用喷气推力器执行机动任务(产生的最大控制力矩 为40nm),最大目标角速度为0.5
°
/s,非姿态机动期间的最大角速度指标为 0.005
°
/s,采样周期h=0.1s。
[0126]
(1)设计两套结构相同、参数不同的“pid控制律 结构滤波器”,作为整 个控制器的主体
[0127]
按如下公式计算pid控制律:
[0128][0129]
对于控制器1,可取k
p
=30、k
i
=0.3、k
d
=40。对于控制器2,可取k
p
=45、 k
i
=0.4、k
d
=70。
[0130]
按如下形式实现结构滤波器:
[0131][0132]
对于多数挠性卫星,可以按照带阻滤波器进行设计,重点考虑一阶挠性模态。 例如,若一阶挠性模态频率为0.628rad/s(约0.1hz),则对于控制器1,可取 ω
z
=ω
p
=0.7,ζ
z
=0.05、ζ
p
=0.4;对于控制器2,可取ω
z
=ω
p
=0.7,ζ
z
=0.04、ζ
p
=0.8。
[0133]
(2)设计调度逻辑,对两套控制器进行在线切换
[0134]
当执行常规的姿态调节控制时,采用控制器1;当执行姿态机动控制时,采 用控制器2。
[0135]
(3)在控制器2前设计跟踪微分器和单神经元分流模块两个环节 具体设计见下述要点(4)(5)。
[0136]
(4)设计跟踪微分器以在线安排过渡过程
[0137]
计算公式如下:
[0138][0139][0140]
相关设计参数取值如下:速度因子r=5,时间参数h0=1(即10h)。
[0141]
(5)设计单神经元分流模块环节以对姿态误差信号进一步快速平滑 计算公式如下:
[0142]
e(k)=θ
td
(k)
‑
θ(k)
[0143]
ξ(k 1)=ξ(k) h{
‑
aξ(k) [b
‑
ξ(k)]s
e
(e(k))
‑
[d ξ(k)]s
i
(e(k))}
[0144]
s
e
(e)=max{e,0}
[0145]
s
i
(e)=max{
‑
e,0}
[0146]
相关设计参数取值如下:衰减率a为=5,输出信号上下界b=d=8。
[0147]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本 领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和 技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明 技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、 等同变化及修饰,均属于本发明技术方案的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。