1.本发明涉及测量技术领域,特别是涉及一种高度测量装置和方法。
背景技术:
2.目前,对于车辆最高点的高度测量,比如车辆的发动机盖或者尾门打开后的最高点的高度测量,通常是依靠人工测量,测量人员使用卷尺和辅助工具直接或间接测量,但是,因为车辆的最高点较高且不易找寻,单人进行测量操作非常困难,同时测量精度受测量人员的影响较大,测量准确度和测量效率较低。
3.对于高度较高的物体的高度测量来说,也存在类似的问题。
4.有鉴于此,如何改进现有对车辆最高点的高度测量方式,以提高测量准确度和测量效率,是本领域技术人员目前需要解决的技术问题。
技术实现要素:
5.本发明的目的是提供一种高度测量装置和方法,该高度测量装置和方法能够快速地测量出待测物的最高点,且测量准确度高。
6.为解决上述技术问题,本发明提供一种高度测量装置,包括举升部件、测量部件和控制器;
7.所述测量部件安装于所述举升部件的支撑平面部;所述举升部件用于带动所述测量部件竖向移动;
8.所述测量部件包括第一测距仪和第二测距仪,所述第一测距仪与所述支撑平面相对固定,所述第二测距仪能够相对所述支撑平面部转动,所述第二测距仪的转动轴线与竖直方向平行;
9.所述第一测距仪用于测量其与支撑待测物的基准平面之间的高度,所述第二测距仪用于测量其与反馈面之间的水平距离;
10.所述控制器用于所述第一测距仪和所述第二测距仪的测距控制,并用于根据所述第二测距仪的反馈信号发送控制指令至所述举升部件以控制所述举升部件的升降。
11.如上所述的高度测量装置,所述测量部件还包括图像采集器,所述图像采集器与所述第二测距仪相对固定;所述控制器还用于根据所述第二测距仪的反馈信号启动所述图像采集器。
12.如上所述的高度测量装置,还包括支撑平台,所述支撑平台与所述支撑平面部可拆卸连接;所述支撑平台上设有支座,所述第一测距仪与所述支座相对固定,所述支座上设有可绕竖直方向旋转的旋转台,所述第二测距仪和所述图像采集器安装于所述旋转台。
13.如上所述的高度测量装置,所述控制器包括第一控制元件和第一蓄电池,所述第一控制元件和所述第一蓄电池设于所述支座,所述第一蓄电池用于为所述第一控制元件和所述测量部件供电;
14.所述第一控制元件用于所述第一测距仪和所述第二测距仪的测距控制,以及所述
图像采集器的启动控制,还用于所述旋转台的旋转控制。
15.如上所述的高度测量装置,还包括基座,所述举升部件安装于所述基座,所述基座设有水平度调节部件,所述水平度调节部件用于调节所述基座相对所述基准平面的水平度,以使所述举升部件的升降方向为竖直方向。
16.如上所述的高度测量装置,所述控制器包括第二控制元件,所述第二控制元件内置于所述基座,用于控制所述举升部件的升降,所述基座内还设有用于为所述第二控制元件和所述举升部件供电的第二蓄电池。
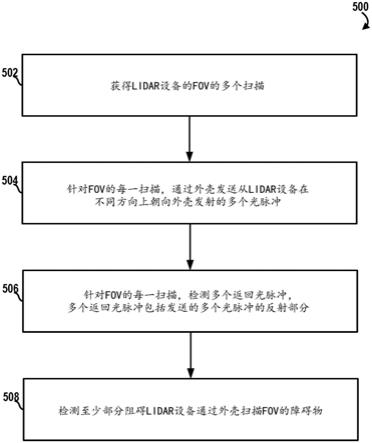
17.本发明还提供一种高度测量方法,采用上述任一项所述的高度测量装置进行测量,所述高度测量方法包括如下步骤:
18.s1、控制所述举升部件将所述测量部件举升至所述第二测距仪高出待测物的高度;
19.s2、启动所述第二测距仪,使其在设定旋转角度内旋转并测量,且将测量结果反馈至所述控制器,所述待测物处于所述设定旋转角度的范围内;
20.所述控制器判断所述测量结果是否大于设定测量距离,所述设定测量距离为所述待测物与所述第二测距仪之间的水平最远距离;
21.若是,发送降低指令至所述举升部件,所述举升部件带动所述测量部件下降第一设定高度后,所述第二测距仪继续测量,直至所述测量结果首次不大于所述设定测量距离,并进入步骤s3;
22.若否,直接进入步骤s3;
23.s3、发送升高指令至所述举升部件,所述举升部件带动所述测量部件升高第二设定高度后,启动所述第二测距仪在所述设定旋转角度内旋转并测量,其将测量结果反馈至所述控制器,直至所述测量结果大于所述设定测量距离;所述第二设定高度不大于所述第一设定高度;
24.s4、发送下降指令至所述举升部件,使所述举升部件带动所述测量部件下降所述第二设定高度;
25.s5、启动所述第一测距仪,测量其与支撑所述待测物的基准平面之间的高度,并反馈至所述控制器;所述控制器根据所述第一测距仪反馈的测量值和预存的所述第一测距仪与所述第二测距仪之间的高度差确定所述待测物最高点的高度。
26.如上所述的高度测量方法,所述步骤s1之前还包括步骤:
27.s0、将所述高度测量装置放置在支撑所述待测物的基准平面,并调节所述高度测量装置的水平度,以使所述举升部件的伸缩杆的伸缩方向为竖直方向,根据所述高度测量装置与所述待测物之间的相对位置确定所述设定旋转角度和所述设定测量距离。
28.如上所述的高度测量方法,所述测量部件还包括图像采集器,所述图像采集器与所述第二测距仪相对固定;所述步骤s5中还包括:
29.启动所述图像采集器,以获取当前高度下对应于所述待测物的定位图片,根据所述定位图片判断当前高度是否为所述待测物的最高点,若是,记录当前高度值,并结束测量;
30.若否,返回步骤s1。
31.如上所述的高度测量方法,所述第一设定高度的取值范围为1~100mm,所述第二
设定高度的取值范围为0.01~1mm。
32.该高度测量装置和方法,在测量时,先用举升部件将测量部件升高,使第二测距仪高出待测物,接着逐次降低第二测距仪第一设定高度,使第二测距仪在每个高度所在平面内在设定旋转角度内进行测量,待测物处于该设定旋转角度内,若是第二测距仪的测量结果不大于设定测量距离,该设定测量距离为待测物与第二测距仪之间的最远距离,则认为第二测距仪已经由高出车辆的位置下降到低于待测物最高点的位置,此时进入微调阶段,再通过举升部件将测量部件逐次升高第二设定高度,此第二设定高度小于第一设定高度,使第二测距仪在每个高度所在平面内在设定旋转角度内进行测量,当测量结果大于设定测量距离时,再通过举升部件将测量部件下降第二设定高度,确定该高度为待测物最高点的高度,通过第一测距仪测量第一测距仪与支撑待测物的基准平面的高度,该高度加上第一测距仪和第二测距仪之间的高度差即为所测待测物最高点的高度。
33.由上可知,该测量装置和测量方法能够实现对待测物(比如车辆)最高点高度的自动测量,不受测量人员的影响,测量速度较快,且精度高。
附图说明
34.图1为本发明所提供高度测量装置的一种具体实施例的结构示意图;
35.图2为图1中所示高度测量装置的测量部分的结构示意图;
36.图3为图2所示测量部件的正视图;
37.图4为图2的左视图;
38.图5为图4的俯视图;
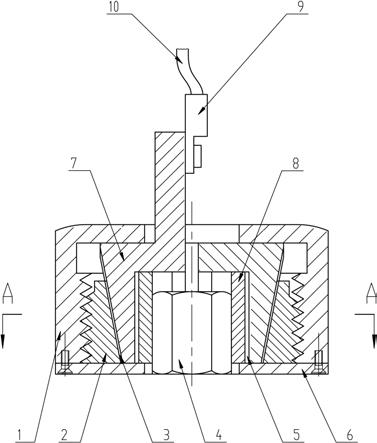
39.图6为图1中所示高度测量装置的举升部分的结构示意图;
40.图7示出了具体实施例中第二测距仪的设定旋转角度的确定简示图;
41.图8为本发明所提供高度测量方法的一种具体实施例的流程图。
42.附图标记说明:
43.举升部分100,基座110,调节螺栓111,水平仪112,举升部件120,伸缩杆121,支撑平面部122;
44.测量部分200,支撑平台210,支座220,第一测距仪230,第二测距仪240,旋转台250,图像采集器260,第一控制元件270,第一蓄电池280;
45.待测车辆300。
具体实施方式
46.为了使本技术领域的人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。
47.为便于理解和描述简洁,本文以高度测量装置和方法一并说明,有益效果不再重复。
48.不失一般性,本文以高度测量装置和方法应用于车辆的高度测量为例进行说明,可以理解,对于其他物件的高度测量也可应用该高度测量装置和方法,其原理类似,不再详述。
49.请参考图1至图8,图1为本发明所提供高度测量装置的一种具体实施例的结构示
意图;图2为图1中所示高度测量装置的测量部分的结构示意图;图3为图2所示测量部件的正视图;图4为图2的左视图;图5为图4的俯视图;图6为图1中所示高度测量装置的举升部分的结构示意图;图7示出了具体实施例中第二测距仪的设定旋转角度的确定简示图;图8为本发明所提供高度测量方法的一种具体实施例的流程图。
50.该实施例中,高度测量装置主要包括举升部分100和测量部分200,还包括控制器。
51.举升部分100包括举升部件120,举升部件120具有支撑平面部122,用于安装测量部分200。
52.测量部分200包括测量部件,测量部件具体包括第一测距仪230和第二测距仪240,其中,第一测距仪230与举升部件120的支撑平面部122相对固定,第二测距仪240能够相对举升部件120的支撑平面部122转动,且其转动轴线与竖直方向平行。
53.第一测距仪230用于测量其与支撑待测车辆300的基准平面之间的高度,第二测距仪240用于测量其与反馈面之间的水平距离。
54.需要指出的是,此处的反馈面指的是第二测距仪240在其所处高度的旋转范围内测量时,能够测到的周边物体。
55.控制器用于第一测距仪230和第二测距仪240的测距控制,并用于根据第二测距仪240的反馈信号发送控制指令至举升部件120以控制举升部件120的升降。
56.可以理解,举升部件120升降时带动测量部件一起升降。
57.采用该高度测量装置对待测车辆300进行测量时,测量方法包括:
58.步骤s1、控制举升部件120将测量部件举升至第二测距仪240高出待测车辆300的高度;
59.步骤s2、启动第二测距仪240,使其在设定旋转角度内旋转并测量,且将测量结果反馈至控制器,待测车辆300处于设定旋转角度a的范围内,如此,第二测距仪240才有可能测到待测车辆300。
60.控制器在接收到第二测距仪240的测量结果反馈后,判断该测量结果是否大于设定测量距离,该设定测量距离为待测车辆300与第二测距仪240之间的水平最远距离。
61.若是,发送降低指令至举升部件120,举升部件120带动测量部件下降第一设定高度后,第二测距仪240继续测量,即继续在设定旋转角度a范围内测量,并反馈测量结果至控制器,直至其测量结果首次不大于设定测量距离,并进入步骤s3;
62.若否,直接进入步骤s3;
63.上述设定旋转角度a的确定可参考图7理解,图7中各部件为简示图,第二测距仪240和待测车辆300处在同一水平面,待测车辆300的两侧边界极限点与第二测距仪240之间形成的夹角可定为设定旋转角度a,可以理解,通常该设定旋转角度a不超过180度,在实际测量时,也可统一将设定旋转角度a直接确定为180度。
64.步骤s3、发送升高指令至举升部件120,举升部件120带动测量部件升高第二设定高度后,启动第二测距仪240在设定旋转角度a内旋转并测量,并将测量结果反馈至控制器,直至测量结果大于设定测量距离,其中,第二设定高度不大于第一设定高度。
65.步骤s4、发送下降指令至举升部件120,使举升部件120带动测量部件下降第二设定高度。
66.步骤s5、启动第一测距仪230,测量其与支持待测车辆300的基准平面之间的高度,
并反馈至控制器,控制器根据第一测距仪230反馈的测量值和预存的第一测距仪230和第二测距仪240之间的高度差(即在竖直方向上第一测距仪230和第二测距仪240之间的距离)确定待测车辆300最高点的高度。
67.如上,在测量初始,第二测距仪240的高度高出待测车辆300,第二测距仪240在该高度内测量时,其反馈面不会是待测车辆300,所以其测量距离理论上会大于设定测量距离,在此基础上,逐次降低第二测距仪240,当其首次测量的距离不大于设定测量距离时,则认为第二测距仪240已经降低到了低于待测车辆300最高点的高度内,此时,再控制第二测距仪240逐次上升,并在每个高度内进行测量,直至测量结果大于设定测量距离,说明在此次升高之前,第二测距仪240已经达到待测车辆300最高点,此时,再将测量部件下降第二设定高度,由第一测距仪230测量其与基准平面之间的高度,结合其与第二测距仪240在竖直方向上的高度差即可确定待测车辆300最高点的高度。
68.步骤s3中,在第二测距仪240已经降低到低于待测车辆300最高点后,再升高测量,可以将该阶段理解为微调阶段,其中,第二设定高度不大于步骤s2中的第一设定高度,第二设定高度的设置与最终测量精度相关,实际设置时,根据具体测量需求来定。比如,实际设置时,第一设定高度的取值范围为1~100mm,第二设定高度的取值范围为0.01~1mm。
69.该高度测量装置和方法能够实现对待测物,比如车辆,最高点高度的自动测量,基本不受测量人员的影响,测量速度较快,且精度高。
70.高度测量装置的举升部分和测量部分可设为可拆卸结构,方便移动,也方便收纳。
71.进一步的方案中,测量部分200还可以包括图像采集器260,该图像采集器260和第二测距仪240相对固定,即图像采集器260可以同第二测距仪240一起旋转,控制器还用于根据第二测距仪的反馈信号启动图像采集器260。图像采集器260具体可选用相机。
72.前述方法的步骤s5还包括:启动图像采集器260,以获取当前高度下对应于待测车辆300的定位图片,根据该定位图片判断当前高度是否为待测车辆的最高点,若是,记录控制器确定的当前高度值,并结束测量,若否,返回步骤s1。
73.这样,在步骤s4将第二测距仪240下降到了与待测车辆300的最高点同一的高度,再用与第二测距仪240相对固定的图像采集器260获取当前高度下的图片,根据该图片信息可以确定周边是否有其他与待测车辆300无关的物件干扰测量,若没有,说明第二测距仪240测量的反馈面确实为待测车辆300,测量准确,若有,则说明受到干扰,可在清除相关干扰物后重新测量。
74.具体的方案中,在步骤s2中,每次降低测量部件时的第一设定高度可以彼此不同,在步骤s3中,每次升高测量时的第二设定高度也可以彼此不同,为方便控制,可以都设为统一值,即每次测量部件降低的第一设定高度一致,每次测量部件升高的第二设定高度一致;当然,实际应用中,可以根据实际测量需求来定。
75.具体的方案中,第一测距仪230和第二测距仪240都可以选用激光测距仪,测量准确。
76.举升部件120通过其伸缩杆121的升降带动测量部分200竖直升降,在伸缩杆121的端面设置支撑平面部122,以提供测量部件的安装平面,确保测量结果的准确性。在不使用时,举升部件120的伸缩杆121可缩回至最短状态,以便于收纳或者携带。
77.实际设置时,举升部件120具体可采用竹节式电动推杆举升器,当然,也可以使用
其他举升装置,比如液压控制的伸缩设备等。
78.为方便操作和控制,该实施例中,控制器包括用于控制测量部件的第一控制元件270和用于控制举升部件120的第二控制元件,两个控制元件通信连接,第一控制元件270用于第一测距仪230和第二测距仪240的测距控制,及图像采集器260的启动控制,还用于根据第二测距仪240的测量结果反馈控制信号至第二控制元件,第二控制元件根据第一控制元件270的反馈控制举升部件120的上升或下降。
79.测量部分200的各部件可以预先组装在一起,使用时,只需要将测量部分200与举升部件120组装即可。
80.具体的方案中,测量部分200包括支撑平台210,该支撑平台210与举升部件120的支撑平面部122可拆卸连接,比如两者可设置位置对应的螺纹孔,通过螺钉等紧固件连接固定。
81.支撑平台210上设有支座220,第一测距仪230固定安装于支座220,支座220上设置有可绕竖直方向旋转的旋转台250,第二测距仪240和图像采集器260可一起安装于旋转台250,由旋转台250带动旋转。
82.具体地,第一控制元件270设于支座220,还设有第一蓄电池280,该第一蓄电池280为第一控制元件270和测量部件(包括第一测距仪230、第二测距仪240和图像采集器260)供电。采用蓄电池的供电方式,成本较低,经济性好。
83.具体的方案中,举升部分100包括基座110,举升部件120具体安装于基座110,基座110上设有水平调节部件,用于调节基座110相对于支撑待测车辆300的基准平面的水平度,以使举升部件120的升降方向为竖直方向,确保测量结果的准确性。
84.具体地,前述第二控制元件可内置于基座110内,同时,基座110内可以内置有第二蓄电池,第二蓄电池可以为第二控制元件和举升部件120供电。
85.前述方法中,在步骤s1之前还包括:
86.步骤s0:将高度测量装置放置在支撑待测车辆300的基准平面,并调节该高度测量装置的水平度,以使举升部件120的伸缩杆121的伸缩方向为竖直方向,根据高度测量装置与待测车辆300的相对位置来确定设定旋转角度a和设定测量距离。
87.高度测量装置与待测车辆300的相对位置可以根据测量场地等需求来确定,可以理解,设定旋转角度a和设定测量距离与两者的相对位置相关,在两者相对位置确定后,可认为预测设定旋转角度a和设定测量距离,并将其预先存储在相关控制元件内,第一设定高度和第二设定高度也预先设定存储。
88.具体地,高度测量装置的举升部分100和测量部分200组装好,且确定好与待测车辆300的相对位置后,可以通过基座110上设置的水平调节部件来调节基座110的水平度,以确保举升部件120升降的竖直性。
89.具体的方案中,水平调节部件为基座110上安装的多个调节螺栓111,通过调节各调节螺栓111的伸出长度来调整基座110的水平度。
90.可在基座110上设置水平度显示仪,具体包括两个水平仪112,两者相垂直设备,分别用于显示两个水平方向上的水平度,调节调节螺栓111时,通过两个水平仪112来确定水平度的调节效果。
91.以上对本发明所提供的高度测量装置和方法均进行了详细介绍。本文中应用了具
体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。