1.本发明涉及船舶与水下航行器工程技术领域,具体涉及一种抗耦合力干扰的轮缘推进器推力测试装置及其使用方法。
背景技术:
2.轮缘推进器是一种能够广泛用于船舶的新型推进器,轮缘推进将电机转子与叶轮集成与一体,由集成电机直接驱动转子并带动叶轮旋转产生推力,取消了旋转轴系,具有高效率、抗空化、低噪声、结构紧凑等优点。一般而言,该种推进器通过轮缘法兰和船体相连接,推进器推力也通过轮缘传递至船体。
3.随着轮缘推进器设计功率及额定推力的不断增加,其测试难度也不断增加。在其运行过程中,水动力合力作用点为轮毂,而推进器的安装方式为通过轮缘法兰和船体固定,目前的推进器实际推力测量实验方法多为将推力天平器直接安装在推进器轮缘法兰和水平支撑梁之间,此时推力天平不但要承受轮缘推进器产生的推力,也要承受该推力作用在传感器上的力矩,该力矩一方面会影响推力天平的推力测量精度,另一方面当力臂较长、推力较大时,产生的力矩甚至可能会超出推力天平扭转强度边界导致系统失稳。
4.为了验证轮缘推进器运行性能,测量其不同转速下的实际推力,市场上亟需一种用于测试轮缘推进器的性能测试平台。
技术实现要素:
5.针对上述现有技术的不足,本发明的目的是提供一种抗耦合力干扰的轮缘推进器推力测试装置及其使用方法,其能够测量轮缘推进器在不同工作转速下的轴向推力,且在测量过程中能够消除轮缘推进器推力作用在推力天平上的力矩影响,从而降低对推力天平的设计要求以及提高推力的测量精度。
6.为实现上述目的,本发明所设计的一种抗耦合力干扰的轮缘推进器推力测试装置,用于测量待测推进器的推力,其装置包括固定设置的支撑梁、第一悬挂组件和第二悬挂组件,所述支撑梁上设有推力天平,所述推力天平上设有水平梁,所述待测推进器设置在水平梁重心的底部;所述第一悬挂组件包括第一调节机构、第一弹簧、第一拉力计和第一拉绳,所述第一调节机构固定设置,所述第一拉力计一端通过第一弹簧与第一调节机构连接,所述第一拉力计另一端通过第一拉绳与水平梁顶部连接,所述第一拉绳设置在待测推进器重心的垂直线上,所述第一调节机构用于调节第一弹簧长度,从而控制第一拉绳对水平梁的作用力;所述第二悬挂组件包括第二调节机构、第二弹簧、第二拉力计和第二拉绳,所述第二调节机构固定设置,所述第二拉力计一端通过第二弹簧与第二调节机构连接,所述第二拉力计另一端通过第二拉绳与水平梁顶部连接,所述第二调节机构用于调节第二弹簧长度,从而调节第二拉绳对水平梁的作用力;所述第一悬挂组件设置在推力天平与第二悬挂组件之间,所述第一拉绳与水平梁作用点、第二拉绳与水平梁作用点和待测推进器重心的垂直线处在同一垂直面上,所述水平梁的重心位于第二拉绳与推力天平之间。
7.进一步地,所述第一调节机构还包括第一丝杆和第一滑块,所述第一滑块与第一丝杆螺纹连接,所述第一弹簧与第一滑块连接,这样,通过调节第一滑块在第一丝杆上的位置,可以调节第一弹簧的长度。通过调节第一弹簧的长度,调节第一弹簧的弹力,从而达到调节第一拉绳拉力的目的。
8.更进一步地,所述第二调节机构还包括第二丝杆和第二滑块,所述第二滑块与第二丝杆螺纹连接,所述第二弹簧与第二滑块连接,这样,通过调节第二滑块在第二丝杆上的位置,可以调节第二弹簧的长度。通过调节第二弹簧的长度,调节第二弹簧的弹力,从而达到调节第二拉绳拉力的目的。
9.作为优选项,所述第一悬挂组件还包括固定设置的第一定滑轮,所述第一拉绳设置在第一定滑轮上,从而改变第一拉绳的受力方向,所述第二悬挂组件还包括固定设置的第二定滑轮,所述第二拉绳设置在第二定滑轮上,从而改变第二拉绳的受力方向。
10.作为优选项,所述第一调节机构、第一弹簧和第一拉力计水平布置,所述第一拉绳垂直90
°
设置在第一定滑轮上;所述第二调节机构、第二弹簧、第二拉力计水平布置,所述第二拉绳垂直90
°
设置在第二定滑轮上。
11.一种抗耦合力干扰的轮缘推进器推力测试装置的使用方法,其特征在于:包括如下步骤:步骤1:关闭待测推进器1,对待测推进器1进行初始状态标定;步骤2:根据步骤1中的初始状态标定结果,计算第二拉绳安装位置并安装第二拉绳;步骤3:开启待测推进器,同步调节第一悬挂组件及第二悬挂组件拉力分配;步骤4:读取待测推进器的实际额定推力。
12.进一步地,所述步骤1还包括如下步骤:步骤1.1:测量待测推进器的重力m1g及浮力f1;步骤1.2:测量水平梁的重力m2g及浮力f2。
13.进一步地,所述步骤2中,所述计算第二拉绳安装位置的具体计算方法为:所述第二拉绳和待测推进器重心的水平距离l应满足下列公式:l = f * d /( m1g
ꢀ‑ꢀ
f
1 )
ꢀꢀ
(1)式中:f为待测推进器的设计额定推力, d为待测推进器推力所在直线与推力天平轴线之间的距离,m1g为待测推进器的重力,f1为待测推进器的浮力。
14.更进一步地,所述步骤3中,所述拉力分配包括如下步骤:步骤3.1:调整第一悬挂组件、第二悬挂组件使第一拉力计的读数t1、第二拉力计的读数t2满足下列公式:t
2 = [ f * d ( m2g
ꢀ‑ꢀ
f
2 )* l
1 ] / l
ꢀꢀ
(2)t
1 = m1g m2g
ꢀ‑ꢀ
f1ꢀ‑ꢀ
f2ꢀ‑ꢀ
t2ꢀꢀ
(3)式中:f为待测推进器的设计额定推力,l为第二拉绳与待测推进器重心垂线的水平距离,d为待测推进器推力所在直线与推力天平轴线之间的距离;l1为水平梁重心垂线与待测推进器重心垂线的水平距离;m1g为待测推进器的重力,f1为待测推进器的浮力,m2g为水平梁的重力,f2为水平梁的浮力;步骤3.2:根据推力天平显示的测量力矩读数小幅调整第一悬挂组件和第二悬挂
组件,使推力天平显示的测量力矩读数为0。
[0015]
作为优选项,所述步骤4中,所述待测推进器实际额定推力的读取方法为:直接读取推力天平的推力读数。
[0016]
与现有技术相比,本发明具有的有益效果为:其装置测量精度高,且对推力天平的设计要求较低,其使推力天平仅需承受待测推进器产生的推力,有效避免了待测推进器推力力矩对推力天平推力测量精度的影响,当力臂较长、推力较大时,也可以有效避免推力力矩超出推力天平扭转强度边界导致系统失稳的严重后果。其使用方法操作简便,不仅调整拉力范围比较宽,适配性强,而且调整精度高。
附图说明
[0017]
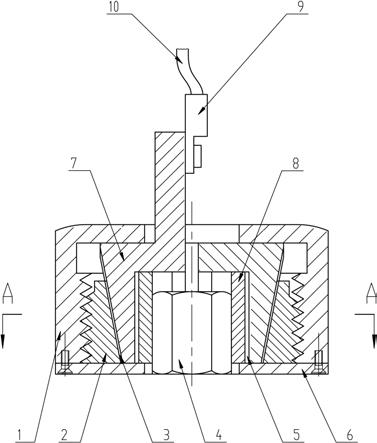
图1是本发明的使用状态示意图;图2是图1的俯视示意图;图3是图1中a
‑
a方向的剖视示意图。
[0018]
图中:测量待测推进器1、支撑梁2、第一悬挂组件3(其中:第一调节机构3.1、第一丝杆3.1.1、第一滑块3.1.2、第一弹簧3.2、第一拉力计3.3、第一拉绳3.4、第一定滑轮3.5)、第二悬挂组件4(其中:第二调节机构4.1、第二丝杆4.1.1、第二滑块4.1.2、第二弹簧4.2、第二拉力计4.3、第二拉绳4.4、第二定滑轮4.5)、推力天平5、水平梁6。
具体实施方式
[0019]
为了使本发明技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。
[0020]
如图1~3所示,本发明提出的抗耦合力干扰的轮缘推进器推力测试装置,用于测量待测推进器1的推力,其装置包括固定设置的支撑梁2、第一悬挂组件3和第二悬挂组件4,所述支撑梁2上设有推力天平5,所述推力天平5上设有水平梁6,所述待测推进器1设置在水平梁6的底部;所述第一悬挂组件3包括第一调节机构3.1、第一弹簧3.2、第一拉力计3.3和第一拉绳3.4,所述第一调节机构3.1固定设置,所述第一拉力计3.3一端通过第一弹簧3.2与第一调节机构3.1连接,所述第一拉力计3.3另一端通过第一拉绳3.4与水平梁6顶部连接,所述第一拉绳3.4设置在待测推进器1重心的垂直线上,所述第一调节机构3.1用于调节第一弹簧3.2长度,从而控制第一拉绳3.4对水平梁6的作用力;所述第二悬挂组件4包括第二调节机构4.1、第二弹簧4.2、第二拉力计4.3和第二拉绳4.4,所述第二调节机构4.1固定设置,所述第二拉力计4.3一端通过第二弹簧4.2与第二调节机构4.1连接,所述第二拉力计4.3另一端通过第二拉绳4.4与水平梁6顶部连接,所述第二调节机构4.1用于调节第二弹簧4.2长度,从而调节第二拉绳4.4对水平梁6的作用力;所述第一悬挂组件3设置在推力天平5与第二悬挂组件4之间,所述第一拉绳3.4与水平梁6作用点、第二拉绳4.4与水平梁6作用点和待测推进器1重心的垂直线处在同一垂直面上,所述水平梁6的重心位于第二拉绳4.4与推力天平5之间。
[0021]
所述第一调节机构3.1还包括第一丝杆3.1.1和第一滑块3.1.2,所述第一滑块3.1.2与第一丝杆3.1.1螺纹连接,所述第一弹簧3.2与第一滑块3.1.2连接,这样,通过调节第一滑块3.1.2在第一丝杆3.1.1上的位置,可以调节第一弹簧3.2的长度。所述第二调节机
构4.1还包括第二丝杆4.1.1和第二滑块4.1.2,所述第二滑块4.1.2与第二丝杆4.1.1螺纹连接,所述第二弹簧4.2与第二滑块4.1.2连接,这样,通过调节第二滑块4.1.2在第二丝杆4.1.1上的位置,可以调节第二弹簧4.2的长度。所述第一悬挂组件3还包括固定设置的第一定滑轮3.5,所述第一拉绳3.4设置在第一定滑轮3.5上,从而改变第一拉绳3.4的受力方向。所述第二悬挂组件4还包括固定设置的第二定滑轮4.5,所述第二拉绳4.4设置在第二定滑轮4.5上,从而改变第二拉绳4.4的受力方向。所述第一调节机构3.1、第一弹簧3.2和第一拉力计3.3水平布置,所述第一拉绳3.4垂直90
°
设置在第一定滑轮3.5上;所述第二调节机构4.1、第二弹簧4.2、第二拉力计4.3水平布置,所述第二拉绳4.4垂直90
°
设置在第二定滑轮4.5上。
[0022]
一种抗耦合力干扰的轮缘推进器推力测试装置的使用方法,其特征在于:包括如下步骤:步骤1:关闭待测推进器1,对待测推进器1进行初始状态标定:步骤1.1:测量待测推进器1的重力m1g及浮力f1;步骤1.2:测量水平梁6的重力m2g及浮力f2。
[0023]
步骤2:根据步骤1中的初始状态标定结果,计算第二拉绳(4.4)安装位置并安装第二拉绳4.4;所述计算第二拉绳(4.4)安装位置的具体计算方法为:所述第二拉绳(4.4)固定点和待测推进器(1)重心的水平距离l应满足下列公式:l = f * d /( m1g
ꢀ‑ꢀ
f
1 )
ꢀꢀ
(1)式中:f为待测推进器1的设计额定推力,d为待测推进器1推力所在直线和推力天平轴线之间的距离,m1g为待测推进器1的重力,f1为待测推进器1的浮力。
[0024]
步骤3:开启待测推进器1,同步调节第一悬挂组件3及第二悬挂组件4拉力分配;所述拉力分配包括如下步骤:步骤3.1:调整第一悬挂组件3、第二悬挂组件4使第一拉力计3.3的读数t1、第二拉力计4.3的读数t2满足下列公式:t
2 = [ f * d ( m2g
ꢀ‑ꢀ
f
2 )* l
1 ] / l
ꢀꢀ
(2)t
1 = m1g m2g
ꢀ‑ꢀ
f1ꢀ‑ꢀ
f2ꢀ‑ꢀ
t2ꢀꢀ
(3)式中:f为待测推进器1的设计额定推力,l为第二拉绳4.4与待测推进器1重心垂线的水平距离,d为待测推进器1推力所在直线与推力天平5轴线之间的距离;l1为水平梁6重心垂线与待测推进器1重心垂线的水平距离;m1g为待测推进器1的重力,f1为待测推进器1的浮力,m2g为水平梁6的重力,f2为水平梁6的浮力;步骤3.2:根据推力天平5显示的测量力矩读数小幅调整第一悬挂组件3和第二悬挂组件4,使推力天平5显示的测量力矩读数为0。
[0025]
步骤4:读取待测推进器1的实际额定推力,所述待测推进器1推力的读取方法为:直接读取推力天平5的推力读数。
[0026]
本发明在实际使用时,测量待测推进器1安装在水平梁6的下方,使待测推进器1产生的推力方向为指向推力天平5,这样,测量待测推进器1时,推力天平5所受的力为挤压力,受力方向为水平方向。
[0027]
支撑梁2用于固定整个装置,支撑梁2可以但不限于是l形支撑梁,l形转折处还设有加强版,支撑梁2的水平方向设有法兰,水平梁6通过法兰与支撑梁2连接,推力天平5设置在水平梁6与支撑梁2的法兰之间,这样的结构有效地提升了整个装置的稳定性。
[0028]
第一悬挂组件3中的第一调节机构3.1、第一弹簧3.2、第一拉力计3.3以及第二悬挂组件4的第二调节机构4.1、第二弹簧4.2、第二拉力计4.3均设置在水面以上水平布置,方便使用时调整。
[0029]
推力天平5可以但不限于为me公司的6dt175型号的六轴力传感器。
[0030]
水平梁6的底部设有法兰,待测推进器1通过法兰与水平梁6固定连接。
[0031]
实施例1:待测推进器1的设计额定推力f=10kn,经步骤1测量,待测推进器1的重力m1g=6kn,浮力f1=1kn;待测推进器1轴心线和推力天平5轴线的距离d=1m,水平梁6重心垂线和待测推进器1重心垂线的水平距离l1=1m;水平梁6的重力m2g=0.4kn,浮力f2=0.05kn;第二拉绳4.4和待测推进器1重心垂线的水平距离l=2m。
[0032]
开启待测推进器1,调节第一悬挂组件3及第二悬挂组件4的拉力分配;使第一拉力计3.3的读数t1和第二拉力计4.3的读数t2满足下列公式:t
2 = [ f * d (m2g
ꢀ‑ꢀ
f2)*l1] / l =5.175kn,t
1 = m1g m2g
ꢀ‑ꢀ
f1ꢀ‑ꢀ
f2ꢀ‑ꢀ
t2=0.175kn。
[0033]
在此基础上根据推力天平显示的测量力矩读数进一步小幅调整第一悬挂组件3和第二悬挂组件4,使推力天平5显示的测量力矩读数尽可能接近或等于0。此时,待测推进器1的实际额定推力可通过直接读取推力天平5的推力读数获得。
[0034]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
[0035]
本说明书未作详细描述的内容属于本领域专业技术人员公知的现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。