1.本技术涉及影像技术领域,特别涉及一种相机壳装置、摄像设备及后视系统。
背景技术:
2.骑行设备(例如自行车等)是我们日常生活中常用的交通工具。骑行设备通常未设置或仅设置简单的头灯,其无法向后方提供灯光提醒。然而,用户在骑乘骑行设备时,需经常进行紧急刹车等操作,骑行设备的后方路人和/或车辆若避让不及时,则容易与骑行设备产生碰撞事故,影响用户骑乘骑行设备的安全性。
技术实现要素:
3.本技术实施例提供一种能够提高用户骑乘骑行设备时的安全性的相机壳装置、摄像设备及后视系统。
4.第一方面,本技术实施例提供一种相机壳装置,包括基座、面盖、第一电连接端、第一警示灯及第二电连接端,所述基座上设有用于容纳相机的容纳空间,所述面盖盖设于所述基座并覆盖所述容纳空间,所述第一电连接端设于所述基座上,所述第一警示灯设于所述面盖上,所述第二电连接端设于所述面盖上并与所述第一警示灯电连接。
5.第二方面,本技术实施例提供一种摄像设备,包括如上所述的相机壳装置及相机,所述相机收容于所述容纳空间内并与所述第一电连接端电连接。
6.第三方面,本技术实施例提供一种后视系统,包括如上所述的摄像设备与显示设备,所述摄像设备用于安装于所述骑行设备上以摄取所述骑行设备的后方影像,所述显示设备用于显示所述后方影像。
7.第四方面,本技术实施例提供一种摄像设备,所述摄像设备包括相机壳装置及嵌设于所述相机壳装置内的相机,所述相机壳装置上设有第一警示灯,所述第一警示灯包括多个灯单元,所述镜头的光轴在投影面上的正投影与所述灯单元在所述投影面上的正投影之间的距离的范围为大于15mm,所述投影面垂直所述镜头的光轴。
8.本技术实施例提供的相机壳装置、摄像设备及后视系统,所述第一警示灯能够根据所述相机发送过来的警示信号发出提醒光信号,以警示骑行设备的后方路人和/或车辆,使后方路人和/或车辆能够及时避让,降低碰撞事故等发生的可能性,提高了用户骑乘骑行设备的安全性。由于第一电连接端设于基座,第一警示灯与第二电连接端设于面盖,有利于扩大第一警示灯的发光面积及增加元件排布于相机壳装置的灵活性。
附图说明
9.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
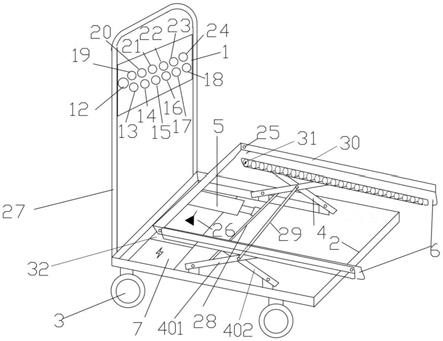
10.图1为本技术第一实施方式提供的后视系统安装于骑行设备时的示意图;
11.图2为本技术第一实施方式提供的后视系统的摄像设备的立体组装示意图;
12.图3为本技术第一实施方式提供的摄像设备的立体分解示意图;
13.图4为本技术第一实施方式提供的摄像设备的结构框图;
14.图5为本技术第一实施方式提供的摄像设备的第一警示灯的示意图;
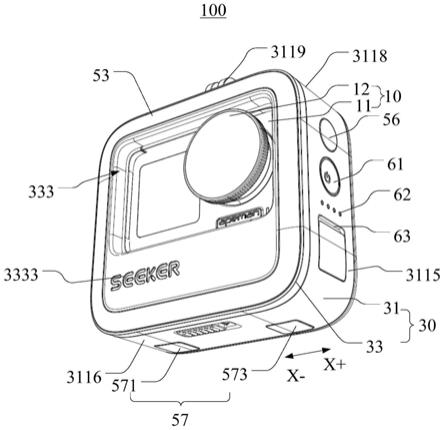
15.图6a为本技术第二实施方式提供的摄像设备的前视图;
16.图6b为图6a所示的第一警示灯与相机在投影面上的正投影的位置示意图;
17.图7为本技术第二实施方式提供的摄像设备的结构框图;
18.图8为本技术一实施方式提供的摄像设备的前视图;
19.图9为本技术第一实施方式提供的摄像设备安装于骑行设备时的示意图;
20.图10为本技术第一实施方式提供的摄像设备的立体组装示意图;
21.图11a为本技术第一实施方式提供的摄像设备的前视图;
22.图11b为图11a所示的摄像设备的镜头的光轴、前照明灯的中心、参考面的位置示意图;
23.图11c为本技术一实施方式提供的摄像设备的镜头的光轴、前照明灯的中心的位置示意图;
24.图12为本技术第一实施方式提供的摄像设备的立体分解示意图;
25.图13为本技术第一实施方式提供的摄像设备的结构框图;
26.图14为本技术第二实施方式提供的摄像设备的结构框图。
具体实施方式
27.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
28.应当理解的是,可以在本技术中使用的诸如“包括”以及“可以包括”之类的表述表示所公开的功能、操作或构成要素的存在性,并且并不限制一个或多个附加功能、操作和构成要素。在本技术中,诸如“包括”及/或“具有”之类的术语可解释为表示特定特性、数目、操作、构成要素、组件或它们的组合,但是不可解释为将一个或多个其它特性、数目、操作、构成要素、组件或它们的组合的存在性或添加可能性排除在外。
29.此外,在本技术中,表述“和/或”包括关联列出的词语中的任意和所有组合。例如,表述“a和/或b”可以包括a,可以包括b,或者可以包括a和b这二者。
30.在本技术中,包含诸如“第一”和“第二”等的序数在内的表述可以修饰各要素。然而,这种要素不被上述表述限制。例如,上述表述并不限制要素的顺序及/或重要性。上述表述仅用于将一个要素与其它要素进行区分。例如,第一用户设备和第二用户设备指示不同的用户设备,尽管第一用户设备和第二用户设备都是用户设备。类似地,在不脱离本技术的范围的情况下,第一要素可以被称为第二要素,类似地,第二要素也可以被称为第一要素。
31.应当理解的是,本技术中的“电连接”应做广义理解,例如,可以是直接相连的电连接,也可以通过中间媒介间接相连的电连接,可以是两个元件内部的连通。
32.应当理解的是,本技术中的“通信连接”包括有线通信连接与无线通信连接。
33.请参阅图1,本技术第一实施方式提供一种应用于骑行设备1000上的后视系统。本实施方式中,骑行设备1000为自行车。骑行设备1000包括车架1010、车座1030及车把手1050。车座1030与车把手1050均设于车架1010上。
34.后视系统包括摄像设备100与显示设备200。摄像设备100用于安装于骑行设备1000上,以采集骑行设备1000的后方影像。骑行设备1000的后方,是指用户骑行时后背朝向方向。摄像设备100与显示设备200通过无线通信模块或有线模块连接相通信,摄像设备100实时采集骑行设备后方的影像,并实时传输给显示设备200。显示设备200用于安装于车把手1050上,以显示摄像设备100所采集的后方实时影像。由于显示设备200能够显示骑行设备1000的后方影像,用户在骑行(例如转弯)时不需反复回头即可从显示设备200中观察到后方路况,提高用户骑行的安全可靠性。本实施方式中,显示设备200为智能手机。
35.可以理解,本技术不限定显示设备200的类型与结构,显示设备200能够显示影像即可,显示设备200包括但不限定为可以是手机、平板电脑、桌面型、膝上型、手持计算机、超级移动个人计算机(ultra
‑
mobile personal computer,umpc)、上网本,以及增强现实(augmented reality,ar)\虚拟现实(virtual reality,vr)穿戴式设备等能够显示影像的设备,本技术实施例对该显示设备的具体形态不作特殊限制。例如穿戴式设备为智能眼镜,显示设备200为智能眼镜时可以佩戴于用户头部。
36.可以理解,本技术不限定摄像设备100安装于车架1010上,摄像设备100可以安装于骑行设备1000的其他位置上,该位置能够提供足够的安装位置和足够的后视,例如,摄像设备100可以安装于车座1030背离车把手1050某个位置上,例如如图1所示,车座1030下后方的刚性件上,摄像设备100能够摄取骑行设备1000的后方影像即可。
37.可以理解,骑行设备1000包括但不限定滑板车、摩托车、电动平衡车(又称体感车、思维车、摄位车)、轮椅、头戴式设备(例如用户骑行时佩戴的头盔)的等等。
38.请参阅图2与图3,摄像设备100包括相机10及相机壳装置30。相机10可以装于相机壳装置30内,相机10通过相机壳装置30可拆卸地安装于车架1010上。由于摄像设备100由分体设置的相机10与相机壳装置30组成,当相机10与相机壳装置30中的一个受损或因其他原因需更换时,可直接替换新的器件,方便使用。
39.请结合参阅图3、图4,相机10包括壳体11,并且壳体11可以承载(附接至、支撑、保持和/或以其它方式承载)镜头12、图像传感器13、位置传感器14、主处理器16。
40.镜头12可以包括(一个或多个)仪器、(一个或多个)工具、和/或媒介,该(一个或多个)仪器/(一个或多个)工具/媒介对穿过它们的光起作用。例如,镜头12可以包括透镜、反射镜、棱镜和/或其它镜头中的一者或多者。镜头12可以影响穿过镜头12的光的方向、偏离和/或路径。镜头12可以被配置为将镜头12的视场内的至少部分光引导至图像传感器13。
41.图像传感器13可以包括将接收的光转换成输出信号的(一个或多个)传感器。输出信号可以包括电信号。例如,图像传感器13可以包括电荷耦合器件传感器、有源像素传感器、互补金属氧化物半导体传感器、n型金属氧化物半导体传感器和/或其它图像传感器中的一者或多者。图像传感器13可以生成输出信号,该输出信号传递限定一个或多个图像(例如,视频的视频帧)的信息。例如,图像传感器13可以被配置为基于在捕获持续时间期间入射到该图像传感器13上的光来生成图像输出信号。图像输出信号可以传递限定具有光学视
场的图像信息。
42.位置传感器14与主处理器16通信连接。位置传感器14用于检测相机10的运动数据并反馈给主处理器16。运动数据包括以下任意一种或者多种的组合:加速度数据、速度数据、姿态数据等等。位置传感器14可以包括将经历的位置/运动转换成输出信号的(一个或多个)传感器。输出信号可以包括电信号。例如,位置传感器14可以指一组位置传感器,该一组位置传感器14可以包括加速度传感器、陀螺仪传感器、速度传感器、重力传感器、姿态传感器、陀螺仪传感器与重力传感器相集成的六轴传感器、重力加速度、陀螺仪与磁力计相集成的九轴传感器和/或其它位置传感器。
43.主处理器16用于根据运动数据向相机壳装置30发送警示信号,以使相机壳装置30发出提醒光信号提醒路人或周边车辆。其中,提醒光信号是指相机壳装置30发出的能够被路人和/或车辆中的人员肉眼可看到的光,例如,指相机壳装置30发出的光形成的图案或文字。运动数据可指示骑行设备1000所处状态。
44.警示信号包括减速警示信号。提醒光信号包括减速提醒光信号。主处理器16用于根据运动数据向相机壳装置30发送减速警示信号,以在骑行设备1000进行减速时相机10能够控制相机壳装置30发出减速提醒光信号,即相机壳装置30具有警示骑行设备1000处于减速状态的功能。如此,骑行设备1000在减速时,相机壳装置30能够提醒骑行设备1000的后方路人或车辆的目的,从而降低了骑行设备1000的后方路人和/或车辆与骑行设备1000碰撞等事故发生的可能性,提高了用户骑乘骑行设备1000的安全性。
45.位置传感器14检测到的运动数据包括加速度数据。警示信号包括第一减速警示信号。提醒光信号包括第一减速提醒光信号。若在第一预设时间阈值范围内的加速度变化值超过第一变化阈值时,主处理器16则向相机壳装置30发送第一减速警示信号。在第一预设时间阈值范围内的加速度变化值超过第一变化阈值,意味着,骑行设备1000在进行紧急减速(或紧急刹车)。换句话说,第一减速警示信号指示骑行设备1000处于紧急减速(或紧急刹车)状态。相机壳装置30根据第一减速警示信号发出第一减速提醒光信号。
46.在一实施方式中,减速警示信号还包括第二减速警示信号、第三减速警示信号,减速提醒光信号包括第二减速提醒光信号、第三减速提醒光信号。第二减速提醒光信号不同于第三减速提醒光信号。位置传感器14检测到的运动数据包括加速度数据。若在第一预设时间阈值范围内加速度变化值超过第一变化阈值而小于第二变化阈值时,主处理器16向相机壳装置30发送第二减速警示信号。在第一预设时间阈值范围内加速度变化值超过第一变化阈值而小于第二变化阈值时,意味着,骑行设备1000处于一般减速状态。相机壳装置30根据第二减速警示信号发出第二减速提醒光信号。若在第一预设时间阈值范围内加速度变化值超过第二变化阈值时,主处理器16向相机壳装置30发送第三减速警示信号。在第一预设时间阈值范围内加速度变化值超过第二变化阈值时,意味着,骑行设备1000处于紧急减速(或紧急刹车)状态。主处理器16控制相机壳装置30根据第三减速警示信号发出第三减速提醒光信号。根据人在骑行设备1000上骑行的不同的减速状态,相机10控制相机壳装置30发出不同的提醒光信号,以能够更好地警醒骑行设备1000的周边或后方的人员与车辆。
47.本实施方式中,第二减速提醒光信号时的亮度低于第三减速提醒光信号的亮度;和/或,第二减速提醒光信号时闪烁频率要小于第三减速提醒光信号时的闪烁频率。可以理解,第二减速提醒光信号时的颜色可以不同于第三减速提醒光信号时的颜色。
48.警示信号还包括转向警示信号。提醒光信号包括转向提醒光信号。若第二预设时间阈值范围内的角度变化值大于第一角度阈值时,主处理器16根据运动数据向相机壳装置30发送转向警示信号,以控制相机壳装置30发出转向提醒光信号,即相机壳装置30具有警示骑行设备1000处于转向状态的功能。
49.运动数据包括加速度数据与姿态数据。转向警示信号包括第一转向警示信号与第二转向警示信号。转向提醒光信号包括第一转向提醒光信号与第二转向提醒光信号。主处理器16根据加速度数据获取第二预设时间阈值范围内的角度变化值。若第二预设时间阈值范围内的角度变化值大于第一角度阈值时,并主处理器16根据姿态数据中的倾斜方向确定骑行设备1000的转向。其中,转向包括第一转向(例如左转向)与第二转向(例如右转向)。当主处理器16确定转向为第一转向时向相机壳装置30发送第一转向警示信号。相机壳装置30接收到第一转向警示信号时发出第一转向提醒光信号。当主处理器16确定转向为第二转向时向相机壳装置30发送第二转向警示信号。相机壳装置30接收到第二转向警示信号时发出第二转向提醒光信号。
50.在一实施方式中,转向警示信号包括一般转向警示信号与急转向警示信号。转向提醒光信号包括一般转向提醒光信号与急转向提醒光信号。一般转向提醒光信号不同于急转向提醒光信号。位置传感器14在第二预设时间阈值范围内检测到的角度变化值大于第二角度阈值并小于第三角度阈值时,主处理器16可确定骑行设备1000在进行一般转向。主处理器16向相机壳装置30发送一般转向警示信号,相机壳装置30发出一般转向提醒光信号。位置传感器14在第二预设时间阈值内检测到角度变化值大于第三角度阈值,并第三角度阈值大于第二角度阈值,主处理器16确定骑行设备1000处于急转向状态。主处理器16向相机壳装置30发送急转向警示信号,相机壳装置30发出急转向提醒光信号。相机壳装置30能够在骑行设备1000在进行一般转向与急转向时发出不同的提醒光信号,从而能够更好地提醒骑行设备1000的周边路人和/或车辆。
51.本实施方式中,一般转向提醒光信号时的亮度低于急转向提醒光信号的亮度;和/或,一般转向提醒光信号时闪烁频率要小于急转向提醒光信号时的闪烁频率。可以理解,一般转向提醒光信号时的颜色不同于急转向提醒光信号时的颜色。
52.较为具体地,一般转向警示信号包括一般第一转向警示信号与一般第二转向警示信号。急转向警示信号包括第一急转向警示信号与第二急转向警示信号。一般转向提醒光信号包括一般第一转向提醒光信号与一般第二转向提醒光信号。急转向提醒光信号包括第一急转向提醒光信号与第二急转向提醒光信号。位置传感器14在第二预设时间阈值范围内检测到的角度变化大于第二角度阈值并小于第三角度阈值时,主处理器16可确定骑行设备1000处于一般转向状态,并主处理器16根据姿态数据中的倾斜方向确定骑行设备1000处于一般转向状态时的转向。当主处理器16确定骑行设备1000进行一般转向时的转向为第一转向时向相机壳装置30发送一般第一转向警示信号。相机壳装置30接收到一般第一转向警示信号时发出一般第一转向提醒光信号。当主处理器16确定骑行设备1000进行一般转向时的转向为第二转向时向相机壳装置30发送一般第二转向警示信号。相机壳装置30接收到一般第二转向警示信号时发出一般第二转向提醒光信号。
53.位置传感器14在第二预设时间阈值内检测到角度变化值大于第三角度阈值,主处理器16可确定骑行设备1000在进行急转向,并主处理器16根据姿态数据中的倾斜方向确定
骑行设备1000的进行急转向时的转向。当主处理器16确定骑行设备1000进行急转向时的转向为第一转向时向相机壳装置30发送第一急转向警示信号。相机壳装置30接收到第一急转向警示信号时发出第一急转向提醒光信号。当主处理器16确定骑行设备1000进行急转向时的转向为第二转向时向相机壳装置30发送第二急转向警示信号。相机壳装置30接收到第二急转向警示信号时发出第二急转向提醒光信号。根据骑行设备1000的具体转向,相机壳装置30发出相应的提醒光信号,以能够更好地提醒骑行设备1000周边的路人和/或车辆。
54.尽管在图4中主处理器16作为单个实体示出,但这仅用于说明目的。主处理器16可以包括在相机10中提供信息处理能力的一个或多个处理器(逻辑电路)。主处理器16可以为相机10提供一个或多个计算功能。主处理器16可以将命令信号操作/发送到相机10的一个或多个部件以操作相机10。例如,主处理器16可以促进相机10在捕获(一个或多个)图像和/或(一个或多个)视频时的操作、促进镜头12的操作(例如,改变镜头12如何引导光)、和/或促进图像传感器13的操作(例如,改变接收到的光被如何转换成限定图像/视频的信息、和/或捕获后如何对图像/视频进行后处理)。主处理器16可以从图像传感器13和/或位置传感器14获得信息,和/或促进将信息从图像传感器13和/或位置传感器14传输到另一设备/部件。
55.主处理器16可以包括存储器,诸如随机存取存储设备(ram)、闪存、或另一合适类型的存储设备,诸如非暂态计算机可读存储器。主处理器16的存储器可以包括可以由主处理器16的一个或多个处理器访问的可执行指令和数据。
56.例如,主处理器16可以包括一个或多个动态随机存取存储器(dram)模块,诸如双倍数据速率同步动态随机存取存储器(ddr sdram)。在一些实现方式中,主处理器16可以包括数字信号处理器(dsp)。在一些实现方式中,主处理器16可以包括专用集成电路(asic)。例如,主处理器16可以包括定制图像信号处理器。
57.相机10还包括与主处理器16电连接的接口17,接口17用于与相机壳装置30电连接。可以理解,相机10上还包括其他接口,例如,用于将图像传输给其他设备的通信接口,用于允许用户控制图像捕获功能和/或观看图像的用户接口等等。
58.相机10还包括用于为相机10供电的电池19。
59.相机10的组件之间可以经由总线(图未标)彼此通信。
60.相机壳装置30包括基座31及面盖33。面盖33与基座31转动连接。基座31可拆卸地安装于骑行设备1000的车架1010上,用于承载相机10。面盖33用于保护相机10。
61.具体地,基座31包括主体311及卡扣313。主体311上设有容纳空间3111,用于容纳相机10。面盖33能够盖设于基座31并覆盖容纳空间3111。卡扣313的第一端通过枢轴与主体311转动连接。卡扣313的第二端与主体311卡扣连接,以防止收容于容纳空间3111内的相机10从基座31上脱离。当卡扣313的第二端与主体311分离时,主体311形成与容纳空间3111连通的开口(图未标),相机10可从开口滑入容纳空间3111。
62.由于主体311与卡扣313采用卡扣连接,方便将相机10组装于基座31上,或将相机10从基座31上拆卸下来。另外,卡扣313与主体311共同将相机10圈围住,有利于保护相机10,以及减小相机10在图像俘获过程中的震动而提高相机10捕获图像的质量。可以理解,基座31上还可以设置与相机10接触的减震结构,以减小相机10所受到的震动。
63.可以理解,基座31与面盖33可以不通过枢轴转动连接,基座31与面盖33可以通过
其他方式连接于一起,例如,基座31与面盖33可以卡扣连接等。
64.可以理解,基座31可以省略卡扣313,相机10可通过其他方式固定于基座31上,例如,在一些实施方式中,相机10的壳体11上设有第一卡持部,容纳空间3111的内壁上设有第二卡持部,第一卡持部与第二卡持部卡持连接,第一卡持部与第二卡持部其中之一为弹性凸起,第一卡持部与第二卡持部中的另外一个为与弹性凸起卡持配合的卡持孔,当相机10安装于预设位置时,弹性凸起卡持于卡持孔中。
65.主体311包括第一表面3113(如图3所示)、第二表面3114(如图3所示)与侧面3115(如图2所示)。第一表面3113与第二表面3114相对设置,容纳空间3111为贯通第一表面3113与第二表面3114的通孔或通槽。侧面3115的一端与第一表面3113连接,侧面3115的另一端与第二表面3114连接。当面盖33盖合于基座31上时,第一表面3113朝向面盖33设置。可以理解,容纳空间3111也可以为贯通第一表面3113但未贯通第二表面3114的凹槽。第一表面3113上还设有第一卡合部315,用于与面盖33卡合。
66.面盖33与主体311转动连接,以使面盖33可开合地盖设于主体311上。当用户有操作容纳于容纳空间3111中的相机10需求时,用户可直接相对基座31翻转面盖33进行操作,如此,提高了相机壳装置30与摄像设备100的使用便利性。
67.面盖33上设有镂空区域333。镂空区域333的位置对应相机10收容于容纳空间3111时镜头12所对应的位置,以在相机10收容于容纳空间时,方便用户操控相机10的镜头12等器件。面盖33为非透光材料制成。面盖33包括相对设置的第三表面3331与第四表面3333,在面盖33盖合于基座31上时,第三表面3331朝向第一表面3113设置。光能够穿过镂空区域333进入位于容纳空间3111的相机10的相机镜头12。可以理解,在一些实施方式中,面盖33可以省略镂空区域333,面盖33可以由透光材料制成。
68.面盖33还包括设于第三表面3331上的第二卡合部335。面盖33盖合于基座31上时,第二卡合部335与第一卡合部315卡合于一起,减少了面盖33脱离基座31的可能性。
69.本实施方式中,第一卡合部315为凹设于第一表面3113上的卡合孔,第二卡合部335为凸设于第三表面3331上的卡扣。
70.可以理解,本技术对第一卡合部315设置于基座31上的位置不作限定,本技术对第二卡合部335设置于面盖33上的位置不作限定,第一卡合部315与第二卡合部335中的一个为卡合孔,第一卡合部315与第二卡合部335中的另一个为与卡合孔相配合的卡扣即可。
71.相机壳装置30还包括辅处理器51、第一电连接端52、第一警示灯53及第二电连接端55。
72.辅处理器51固定收容于基座31的主体311内。辅处理器51用于在相机10承载于基座31时与相机10电连接。第一电连接端52设于第一表面3113上,第一电连接端52与辅处理器51电连接。第二电连接端55设于面盖33的第三表面3331上,第一警示灯53设于面盖33的第四表面3333上。第二电连接端55与第一警示灯53电连接。当面盖33盖合于基座31时,第二电连接端55与第一电连接端52电连接。本实施方式中,第一电连接端52为弹簧针连接器(又称pogo pin连接器)中的公座,第二电连接端55为弹簧针连接器中的母座。可以理解,本技术不限定第一电连接端52的电连接器类型,本技术不限定第二电连接端55的电连接器类型,第一电连接端52与第二电连接端55通过物理接触后实现电连接即可。
73.辅处理器51能够根据所接收到的相机10发送过来的警示信号控制第一警示灯53
发出提醒光信号向骑行设备1000的周边路人和/或车辆进行警示,减少碰撞等事故的发生,提高用户骑乘骑行设备1000时的骑乘安全性。另外,由于第一电连接端52设于基座31,第一警示灯53与第二电连接端55设于面盖33,有利于扩大第一警示灯53的发光面积及增加元件排布于相机壳装置30的灵活性。
74.尽管在图4中辅处理器51作为单个实体示出,但这仅用于说明目的。辅处理器51可以包括在相机壳装置30中提供信息处理能力的一个或多个处理器(逻辑电路)。辅处理器51可以为辅处理器51提供一个或多个计算功能。辅处理器51可以将命令信号操作/发送到辅处理器51的一个或多个部件以操作辅处理器51。
75.辅处理器51可以包括存储器,诸如随机存取存储设备(ram)、闪存、或另一合适类型的存储设备,诸如非暂态计算机可读存储器。辅处理器51的存储器可以包括可以由辅处理器51的一个或多个处理器访问的可执行指令和数据。
76.例如,在一些实现方式中,辅处理器51可以包括一个或多个动态随机存取存储器(dram)模块,诸如双倍数据速率同步动态随机存取存储器(ddr sdram包括数字信号处理器(dsp)。在一些实现方式中,辅处理器51可以包括专用集成电路(asic)。
77.本实施方式中,容纳空间3111的内壁上凸设有接口317(如图3所示)。接口317在卡扣313的第二端与主体311卡扣连接时与卡扣313相对设置。当相机10滑入容纳空间3111并到达预设位置时,接口317与相机10上的接口17实现对接,从而实现辅处理器51与主处理器16之间的电连接。由于容纳空间3111的内壁上凸设的接口317与相机10上的接口17直接电连接,而未将走线暴露于相机壳装置30外,简化了摄像设备100的走线结构。相机10滑至基座31上的预设位置后,相机10与相机壳装置30之间无需进一步插线进行电连接,简化了相机10组装于相机壳装置30上的组装步骤,提高了摄像设备100的组装效率。
78.本实施方式中,第一警示灯53环绕相机10设置,第一警示灯53沿第四表面3333的周缘设置形成环形结构。辅处理器51根据警示信号控制第一警示灯53发出提醒光信号。提醒光信号为第一警示灯53发光或闪烁。请参阅图5,第一警示灯53包括多个灯单元531。辅处理器51可根据警示信号控制多个灯单元531中的至少部分进行发光或闪烁,以使第一警示灯53发出提醒光信号。
79.若辅处理器51接收到第一减速警示信号,辅处理器51则控制第一警示灯53发出第一减速提醒光信号。第一减速提醒光信号可以为第一警示灯53中的全部灯单元531发光或闪烁,第一减速警示信号也可以为多个灯单元531中的部分发光或闪烁。第一减速提醒光信号用于提醒骑行设备1000的后方路人和/或车辆骑行设备1000正在减速。
80.在一实施方式中,若辅处理器51接收到主处理器16发出的第二减速警示信号,辅处理器51则控制第一警示灯53发出第二减速提醒光信号,以提醒骑行设备1000后方的路人和/或车辆骑行设备1000正在进行一般减速。若辅处理器51接收到主处理器16发出的第三减速警示信号,辅处理器51则控制第一警示灯53发出第三减速提醒光信号,以提醒骑行设备1000后方的路人及/或车辆骑行设备1000正在进行紧急减速。其中,第一警示灯53在发出第二减速提醒光信号时的亮度要小于第一警示灯53在发出第三减速提醒光信号时的亮度,以在骑行设备1000进行紧急减速时更能警醒骑行设备1000后方的路人及/或车辆。
81.为实现第二减速提醒光信号时的亮度小于第一警示灯53在发出第三减速提醒光信号的亮度,可以使第一警示灯53在发出第二减速提醒光信号时全部灯单元531以第一亮
度发光,第一警示灯53在发出第三减速提醒光信号时全部灯单元531以第二亮度发光,其中,第一亮度小于第二亮度。
82.可以理解,为实现第二减速提醒光信号的亮度小于第三减速提醒光信号的亮度,还可以使第三减速提醒光信号时灯单元531的发光数量小于第一警示灯53在发出第三减速提醒光信号时灯单元531的发光数量。
83.可以理解,本技术不限定第一警示灯53在发出第二减速提醒光信号时的亮度小于第一警示灯53在发出第三减速提醒光信号的亮度,在一些实施方式中,第二减速提醒光信号的颜色(例如为黄色)不同于第三减速提醒光信号的颜色(例如为红色)等等。在一些实施方式中,第一警示灯53在发出第二减速提醒光信号时的闪烁频率小于第一警示灯53在发出第三减速提醒光信号的闪烁频率。
84.若辅处理器51接收到第一转向警示信号,则辅处理器51控制第一警示灯53发出第一转向提醒光信号,以提醒骑行设备1000后方的人员及/或车辆骑行设备1000正在进行第一转向。若辅处理器51接收到第二转向警示信号,则辅处理器51控制第一警示灯53发出第二转向提醒光信号,以提醒骑行设备i000后方的人员及/或车辆骑行设备1000正在进行第二转向。第一警示灯53发出第一转向提醒光信号时,部分灯单元531发光组成的图案为与第一转向相对应的转向箭头(例如左转向箭头)。第一警示灯53发出第二转向提醒光信号时,部分灯单元531发光组成的图案为与第二转向相对应的转向箭头(例如左转向箭头)。可以理解,本技术对第一警示灯53发出第一转向提醒光信号时形成的图案不作限定,本技术对第一警示灯53发出第二转向提醒光信号时形成的图案不作限定,例如,可以为方形等图案。
85.在一实施方式中,若辅处理器51接收到一般转向警示信号,则辅处理器51控制第一警示灯53发出一般转向提醒光信号。若辅处理器51接收到急转向警示信号,则辅处理器51控制第一警示灯53发出急转向提醒光信号。第一警示灯53发出一般转向提醒光信号的亮度要小于第一警示灯53发出急转向提醒光信号的亮度,和/或,第一警示灯53发出一般转向提醒光信号的闪烁频率要小于第一警示灯53发出急转向提醒光信号的闪烁频率。相机壳装置30能够在骑行设备1000在进行一般转向与急转向时发出不同亮度的提醒光信号,从而能够更好地提醒骑行设备1000的周边路人和/或车辆。
86.较为具体地,若辅处理器51接收到一般第一转向警示信号,则辅处理器51控制第一警示灯53发出一般第一转向提醒光信号。若辅处理器51接收到一般第二转向警示信号,则辅处理器51控制第一警示灯53发出一般第二转向提醒光信号。若辅处理器51接收到第一急转向警示信号,则辅处理器51控制第一警示灯53发出第一急转向提醒光信号。若辅处理器51接收到第二急转向警示信号,则辅处理器51控制第一警示灯53发出第二急转向提醒光信号。
87.可以理解,本技术不限定第一警示灯53发出一般转向提醒光信号的亮度要小于第一警示灯53发出急转向提醒光信号的亮度,在一些实施方式中,第一警示灯53发出一般转向提醒光信号的颜色(例如为黄色)不同于第一警示灯53发出急转向提醒光信号的颜色(例如为红色)等等。
88.当用户在环境亮度较低的环境骑乘骑行设备时,例如夜晚或在隧道内时,若缺乏灯光警示,很容易与路人和/或车辆发生碰撞造成安全事故。本实施方式中,相机壳装置30还包括设于主体311的侧面3115的光线传感器56(如图2与图4所示)。光线传感器56与辅处
理器51电连接,光线传感器56用于检测相机壳装置30所处环境的环境亮度值并反馈给辅处理器51。辅处理器51将环境亮度值与预设环境亮度阈值进行比较。若环境亮度值小于预设环境亮度阈值时,辅处理器51确定相机壳装置30所处环境为低亮度环境,辅处理器51向第一警示灯53发送第一开启信号,第一警示灯53根据第一开启信号发光和/或闪烁。光线传感器56检测到骑行设备1000在低亮度环境行驶时,第一警示灯53会自动发光警示,提醒路人和/或车辆,提高了用户在低亮度环境中骑乘骑行设备1000的安全性。本实施方式中,第一警示灯53根据警示信号发光的亮度要大于第一警示灯53根据第一开启信号开启时发光的亮度,和/或,第一警示灯53根据警示信号闪烁的频率要大于第一警示灯53根据第一开启信号开启时闪烁的频率,以更好地在低亮度环境警醒路人及/或车辆。警示信号包括第一减速警示信号、第二减速警示信号、第三减速警示信号、第一急转向警示信号、第二急转向警示信号。若环境亮度值不小于预设环境亮度阈值时,辅处理器51确定相机壳装置30所处环境为高亮度环境。
89.可以理解,光线传感器56设置于摄像设备100上的位置不作限定,例如可以设置在相机10上。
90.可以理解,在其他实施方式中,第一警示灯53根据警示信号发光的亮度也可以不大于第一警示灯53根据第一开启信号开启时发光的亮度,第一警示灯53根据警示信号闪烁的频率也可以不大于第一警示灯53根据第一开启信号开启时闪烁的频率。
91.本实施方式中,相机壳装置30还包括设于基座31底部的第二警示灯57(如图2与图4所示),第二警示灯57与辅处理器51通信连接。在光线传感器56检测到的环境亮度低于预设亮度阈值时,辅处理器51向第二警示灯57发送第二开启信号以控制第二警示灯57发光,以提醒骑行设备1000的周边的路人和/或车辆行驶安全范围,降低骑行设备1000与周边的路人和/或车辆发生刮擦、碰撞等事故的可能性。
92.主体311还包括位于主体311底部的底面3116。底面3116与侧面3115固定连接。底面3116连接于第一表面3113与第二表面3114之间。第二警示灯57设于底面3116上。第二警示灯57包括第一镭射灯模组571与第二镭射灯模组573。第一镭射灯模组571与第二镭射灯模组573间隔设置。第一镭射灯模组571与第二镭射灯模组573设置于底面3116,进而不会对相机10的采集后方影像时造成干涉影响。第一镭射灯模组571与第二镭射灯模组573之间的距离范围为[40,80]mm,即第一镭射灯模组571与第二镭射灯模组573之间的距离范围为不小于40mm且不大于80mm,减小第一镭射灯模组571与第二镭射灯模组573两者发生干涉的可能性。
[0093]
第一镭射灯模组571的出光面的法线相对参考方向的反向(例如图2中的x
‑
方向)倾斜角度范围为[0
°
,15
°
],第二镭射灯模组573的出光面的法线相对参考方向的正向(例如图2中的x 方向)倾斜角度范围为[0
°
,15
°
],进一步减小第一镭射灯模组571与第二镭射灯模组573两者发生干涉的可能性。本实施方式中,相机10的接口17与接口317沿参考方向插接于一起,第一镭射灯模组571与第二镭射灯模组573沿参考方向间隔设置。可以理解,本技术不限定相机10的接口17与接口317沿参考方向插接于一起。可以理解,本技术不限定第二警示灯57为镭射灯,本技术不限定第一镭射灯模组571与第二镭射灯模组573之间的距离范围,本技术不限定第一镭射灯模组571的出光面的法线相对参考方向的反向(例如图中的x
‑
方向)倾斜角度范围,第二镭射灯模组573的出光面的法线相对参考方向的正向(例如图中
的x
‑
方向)倾斜角度范围。
[0094]
主体311还包括位于主体311顶部的顶面3118。底面3116与顶面3118相对设置。侧面3115连接于底面3116与顶面3118之间。主体311于顶面3118上凸设固定扣3119,用于与车架1010固定连接。
[0095]
相机10通常包括非骑行模式与骑行模式等工作模式。相机10未安装在骑行设备1000上时,由于抖动不多或抖动强度不强,相机10可采用非骑行模式进行工作。相机10安装在骑行设备1000上时,由于骑行设备1000处于运动状态,抖动多且抖动强度比较大,相机10通常采用骑行模式进行工作,以能够采集到高质量影像。相机壳装置30还包括近距离无线通信芯片(例如nfc芯片)58,近距离无线通信芯片58设于卡扣313的第二端。相机10包括与主处理器16电连接的感应装置21,感应装置21用于感应近距离无线通信芯片58。
[0096]
当相机10滑入容纳空间3111并到达预设位置,且卡扣313的第二端与主体311卡扣连接时,相机10与近距离无线通信芯片58的距离小于预设距离阈值。若相机10与近距离无线通信芯片58的距离小于预设距离阈值,相机10的感应装置21会产生指示信号,意味着相机10已装入相机壳装置30的预设位置。所述指示信号用于指示相机10进入骑行模式。感应装置21将指示信号反馈至主处理器16。主处理器16根据指示信号控制相机10从非骑行模式进入骑行模式。由于相机10与近距离无线通信芯片58的距离小于预设距离阈值时,相机10可自行进入骑行模式进行拍摄,而无需用户手动操作,提高了摄像设备100的使用便捷性。
[0097]
相机壳装置30还包括固定收容于主体内的电源59,电源59与辅处理器51电连接。电源59用于为第一警示灯53、辅处理器51、第二警示灯57、相机10等器件进行供电。电源59可以是可充电电池或不可充电电池。电源59的规格为18650规格和21700规格中的一种。
[0098]
相机壳装置30还包括设于侧面3115上的电源开关61,用于开启电源59。可以理解,本技术对电源开关61设于相机壳装置30的位置不作限定,例如,电源开关61也可以设于顶面3118或第二表面3114等。
[0099]
相机壳装置30还包括设于侧面3115上的电源指示灯62,电源指示灯62与电源59电连接,电源指示灯62用于指示电源59的状态。可以理解,本技术对电源指示灯62设于相机壳装置30的位置不作限定,例如,电源指示灯62也可以设于顶面3118或第二表面3114等。
[0100]
相机壳装置30还包括设于侧面3115上的充电端子63,用于为电源59充电。可以理解,本技术对充电端子63设于相机壳装置30的位置不作限定,例如,电源开关61也可以设于顶面3118或第二表面3114等。
[0101]
本技术第一实施方式提供的相机壳装置30、摄像设备100与后视系统,由于相机壳装置30能够根据所接收到的相机10发送过来的警示信号控制第一警示灯53发光警示,减少碰撞等事故的发生,提高用户骑乘骑行设备1000时的骑乘安全性。
[0102]
请参阅图6a,本技术第二实施方式提供的摄像设备100与第一实施方式提供的摄像设备的结构的区别在于,相机壳装置30与相机10一体设置,即相机10嵌设于相机壳装置30内。由于相机壳装置30与相机10一体设置,简化了摄像设备100的结构。
[0103]
相机壳装置30上设有第一警示灯53,相机10包括镜头12。请结合参阅图6b,图6b为摄像设备的第一警示灯53、相机10在投影面上的正投影的位置示意图,第一警示灯53于投影面上的正投影为53a,第一警示灯53包括多个灯单元,灯单元于投影面上的正投影为531a,镜头12的光轴o于投影面上的正投影为o’。投影面垂直镜头12的光轴。正投影o’与正
投影531a之间的距离的范围为大于15mm,正投影o’与正投影531a之间的距离的优先范围为15mm且小于30mm。换而言之,镜头12的光轴在投影面上的正投影与灯单元在投影面上的正投影之间的距离的范围为大于15mm,投影面垂直镜头12的光轴。镜头12的光轴在投影面上的正投影(如图6b所示的o’)与灯单元在投影面的正投影之间的距离的范围优选为大于15mm且小于相机壳装置最长边缘的十分之九。第一警示灯53开启时,减少第一警示灯53的灯光范围与镜头12的成像视角发生重叠的可能性,第一警示灯53对镜头12成像造成的干涉,提高相机10与摄像设备100的成像质量。
[0104]
本实施方式中,摄像设备100大致呈长方体状。相机壳装置30包括连接设置的第一边缘301与第二边缘303,第一警示灯53沿第一边缘301与第二边缘303设置形成环形结构。第一边缘301与第二边缘303亦为摄像设备100的边缘。第一边缘301的长度为m,第二边缘303的长度为n,其中m大于n,即第一边缘301为摄像设备100的最长边缘。可以理解,m也可以与n相等。
[0105]
第一边缘301沿第一方向(如图6a所示的x方向)延伸,第二边缘303沿与第一方向相垂直的第二方向(如图6a所示的y方向)延伸,镜头12的光轴o与第三方向平行,第三方向与第一方向相垂直,第三方向与第一方向相垂直。
[0106]
沿第二边缘303设置的每个灯单元于投影面上的正投影531a与第一轴线b1(如图6b所示)之间的距离l2范围为大于15mm且小于第一边缘301长度的五分之四(m*4/5),第一轴线b1与第二方向平行。沿第一边缘301设置的每个灯单元于投影面上的正投影531a与第二轴线b2(如图6b所示)之间的距离l3的范围为大于15mm且小于所述第一边缘301的长度的五分之四(m*4/5)。如此,第一警示灯53开启时,进一步减少第一警示灯53的灯光范围与镜头12的成像视角发生重叠的可能性,第一警示灯53对镜头12成像造成的干涉,提高摄像设备100的成像质量减小。
[0107]
相机10的主处理器16与第一警示灯53电连接。主处理器16用于根据相机10的位置传感器14检测到的运动数据向第一警示灯53发送警示信号,以使第一警示灯53发出提醒光信号提醒路人或周边车辆。
[0108]
若在第一预设时间阈值范围内的加速度变化值超过第一变化阈值时,主处理器16则向第一警示灯53发送第一减速警示信号。第一警示灯53根据第一减速警示信号发出第一减速提醒光信号。
[0109]
在一实施方式中,若在第一预设时间阈值范围内加速度变化值超过第一变化阈值而小于第二变化阈值时,主处理器16向第一警示灯53发送第二减速警示信号。第一警示灯53根据第二减速警示信号发出第二减速提醒光信号。若在第一预设时间阈值范围内加速度变化值超过第二变化阈值时,主处理器16向第一警示灯53发送第三减速警示信号。第一警示灯53根据第三减速警示信号发出第三减速提醒光信号。
[0110]
主处理器16还用于根据位置传感器14检测到的运动数据向第一警示灯53发送转向警示信号,以控制第一警示灯53发出转向提醒光信号。
[0111]
转向警示信号包括第一转向警示信号与第二转向警示信号。转向提醒光信号包括第一转向提醒光信号与第二转向提醒光信号。主处理器16根据加速度数据获取第二预设时间阈值范围内的角度变化值。若第二预设时间阈值范围内的角度变化值大于第一角度阈值时,并主处理器16根据姿态数据中的倾斜方向确定骑行设备的转向。其中,转向包括第一转
向(例如左转向)与第二转向(例如右转向)。当主处理器16确定转向为第一转向时向第一警示灯53发送第一转向警示信号。第一警示灯53根据第一转向警示信号发出第一转向提醒光信号。当主处理器16确定转向为第二转向时向第一警示灯53发送第二转向警示信号。第一警示灯53根据第二转向警示信号发出第二转向提醒光信号。
[0112]
在一实施方式中,转向警示信号还包括一般转向警示信号与急转向警示信号。转向提醒光信号包括一般转向提醒光信号与急转向提醒光信号。位置传感器14在第二预设时间阈值范围内检测到的角度变化大于第二角度阈值并小于第三角度阈值时,主处理器16可确定骑行设备在进行一般转向。主处理器16向第一警示灯53发送一般转向警示信号,第一警示灯53根据一般转向警示信号发出一般转向提醒光信号。位置传感器14在第二预设时间阈值内检测到角度变化大于第三角度阈值,并第三角度阈值大于第二角度阈值,主处理器16确定骑行设备1000在进行急转向。主处理器16向第一警示灯53发送急转向警示信号,第一警示灯53发出急转向提醒光信号。第一警示灯53能够在骑行设备在进行一般转向与急转向时发出不同的提醒光信号,从而能够更好地提醒骑行设备的周边路人和/或车辆。
[0113]
较为具体地,一般转向警示信号包括一般第一转向警示信号与一般第二转向警示信号。急转向警示信号包括第一急转向警示信号与第二急转向警示信号。一般转向提醒光信号包括一般第一转向提醒光信号与一般第二转向提醒光信号。急转向提醒光信号包括第一急转向提醒光信号与第二急转向提醒光信号。位置传感器14在第二预设时间阈值范围内检测到的角度变化大于第二角度阈值并小于第三角度阈值时,主处理器16可确定骑行设备在进行一般转向,并主处理器16根据姿态数据中的倾斜方向确定骑行设备的进行一般转向时的转向。当主处理器16确定骑行设备进行一般转向时的转向为第一转向时向第一警示灯53发送一般第一转向警示信号。第一警示灯53根据一般第一转向警示信号发出一般第一转向提醒光信号。当主处理器16确定骑行设备进行一般转向时的转向为第二转向时向第一警示灯53发送一般第二转向警示信号。第一警示灯53根据一般第二转向警示信号发出一般第二转向提醒光信号。
[0114]
位置传感器14在第二预设时间阈值内检测到角度变化大于第三角度阈值,主处理器16可确定骑行设备在进行急转向,并主处理器16根据姿态数据中的倾斜方向确定骑行设备的进行急转向时的转向。当主处理器16确定骑行设备进行急转向时的转向为第一转向时向第一警示灯53发送第一急转向警示信号。第一警示灯53根据第一急转向警示信号发出第一急转向提醒光信号。当主处理器16确定骑行设备进行急转向时的转向为第二转向时向第一警示灯53发送第二急转向警示信号。第一警示灯53根据第二急转向警示信号发出第二急转向提醒光信号。
[0115]
可以理解,不限定第一警示灯53在相机壳装置30上的排布方式,第一警示灯53可以不为环形结构,例如,如图8所示,第一警示灯53大致可以呈矩形,第一警示灯53位于相机10的下方。第一警示灯53的数量也可以为两个或多个。
[0116]
摄像设备100还包括设于相机壳装置30上的光线传感器56,光线传感器56与主处理器16电连接。光线传感器56用于感测摄像设备100所处环境的环境亮度,主处理器16在确定光线传感器56检测到的环境亮度低于预设亮度阈值的情况下,主处理器16向第一警示灯53发送第一开启信号以开启第一警示灯53。
[0117]
第一警示灯53根据所述警示信号发光的亮度要大于第一警示灯53根据所述第一
开启信号开启时发光的亮度,和/或,第一警示灯53根据所述警示信号发出提醒光信号时闪烁的频率要大于第一警示灯53根据所述第一开启信号开启时闪烁的频率。
[0118]
摄像设备100还包括设于相机壳装置30的底部上的第二警示灯57,所述第二警示灯57与主处理器16电连接,在光线传感器56检测到的环境亮度低于预设亮度阈值时,主处理器16向第二警示灯57发送第二开启信号以控制第二警示灯57发光。
[0119]
第二警示灯57包括第一镭射灯模组571与第二镭射灯模组573,第一镭射灯模组571与第二镭射灯模组573的距离范围为大于40mm且小于80mm。
[0120]
第一镭射灯模组571的出光面的法线相对参考方向的反向倾斜的角度范围为大于0
°
且小于15
°
,第二镭射灯模组573的出光面的法线相对参考方向的正向倾斜的角度范围为大于0
°
且小于15
°
。第一镭射灯模组571与第二镭射灯模组573沿参考方向间隔设置。
[0121]
摄像设备100还包括电源59,电源59与主处理器16电连接。电源59用于为第一警示灯53、第二警示灯57、光线传感器56、相机10等器件进行供电。电源59可以是可充电电池或不可充电电池。电源59的规格为18650规格和21700规格中的一种。
[0122]
可以理解,第一警示灯53的设置位置不限定在相机壳装置30,第一警示灯53也可以设置在相机10上,在一些实施方式中,摄像设备100包括第一警示灯53与镜头12,第一警示灯53包括多个灯单元,镜头12的光轴在投影面上的正投影与灯单元在投影面上的正投影之间的距离的范围为大于15mm,投影面垂直镜头12的光轴,摄像设备100能够摄取图像即可。
[0123]
可以理解,光线传感器56不限定设置于相机壳装置,光线传感器56也可以设置于相机10上。
[0124]
请参阅图9,本技术第三实施方式提供一种应用于骑行设备1000上的摄像设备100。本实施方式中,骑行设备1000为自行车。骑行设备1000包括车架1010、车座1030及车把手1050。车座1030与车把手1050均设于车架1010上。摄像设备100用于安装于骑行设备1000的车把手1050上,以采集骑行设备1000的前方影像。骑行设备1000的前方,是指用户骑行时眼睛所朝向方向。
[0125]
可以理解,本技术不限定摄像设备100安装于车把手1050上,摄像设备100也可安装于骑行设备1000的其他位置上,该位置能够提供足够的安装位置和足够的前视空间,例如,摄像设备100安装于车架1010上,摄像设备100能够摄取前方影像即可。
[0126]
请参阅图10、图11a与图12,摄像设备100包括可拆卸地连接设置的相机10及相机壳装置30。相机10通过相机壳装置30可拆卸地安装于车把手1050上。由于摄像设备100由分体设置的相机10与相机壳装置30组成,当相机10与相机壳装置30中的一个受损或因其他原因需更换时,可直接替换新的器件,方便使用。
[0127]
请结合参阅图13,相机10包括壳体11,并且壳体11可以承载(附接至、支撑、保持和/或以其它方式承载)镜头12、图像传感器13与主处理器16。
[0128]
镜头12可以包括(一个或多个)仪器、(一个或多个)工具、和/或媒介,该(一个或多个)仪器/(一个或多个)工具/媒介对穿过它们的光起作用。例如,镜头12可以包括透镜、反射镜、棱镜和/或其它镜头中的一者或多者。镜头12可以影响穿过镜头12的光的方向、偏离和/或路径。镜头12可以被配置为将镜头12的视场内的至少部分光引导至图像传感器13。
[0129]
图像传感器13可以包括将接收的光转换成输出信号的(一个或多个)传感器。输出
信号可以包括电信号。例如,图像传感器13可以包括电荷耦合器件传感器、有源像素传感器、互补金属氧化物半导体传感器、n型金属氧化物半导体传感器和/或其它图像传感器中的一者或多者。图像传感器13可以生成输出信号,该输出信号传递限定一个或多个图像(例如,视频的视频帧)的信息。例如,图像传感器13可以被配置为基于在捕获持续时间期间入射到该图像传感器13上的光来生成图像输出信号。图像输出信号可以传递限定具有光学视场的图像信息。
[0130]
位置传感器14用于检测相机10的运动数据并反馈给主处理器16。运动数据包括以下任意一种或者多种的组合:加速度数据、速度数据、姿态数据等等。位置传感器14可以包括将经历的位置/运动转换成输出信号的(一个或多个)传感器。输出信号可以包括电信号。例如,位置传感器14可以指一组位置传感器,该一组位置传感器14可以包括加速度传感器、陀螺仪传感器、速度传感器、重力传感器、姿态传感器、陀螺仪传感器与重力传感器相集成的六轴传感器、重力加速度、陀螺仪与磁力计相集成的九轴传感器和/或其它位置传感器。
[0131]
尽管在图13中主处理器16作为单个实体示出,但这仅用于说明目的。主处理器16可以包括在相机10中提供信息处理能力的一个或多个处理器(逻辑电路)。主处理器16可以为相机10提供一个或多个计算功能。主处理器16可以将命令信号操作/发送到相机10的一个或多个部件以操作相机10。例如,主处理器16可以促进相机10在捕获(一个或多个)图像和/或(一个或多个)视频时的操作、促进镜头12的操作(例如,改变镜头12如何引导光)、和/或促进图像传感器13的操作(例如,改变接收到的光被如何转换成限定图像/视频的信息、和/或捕获后如何对图像/视频进行后处理)。主处理器16可以从图像传感器13和/或位置传感器14获得信息,和/或促进将信息从图像传感器13和/或位置传感器14传输到另一设备/部件。
[0132]
主处理器16可以包括存储器,诸如随机存取存储设备(ram)、闪存、或另一合适类型的存储设备,诸如非暂态计算机可读存储器。主处理器16的存储器可以包括可以由主处理器16的一个或多个处理器访问的可执行指令和数据。
[0133]
例如,主处理器16可以包括一个或多个动态随机存取存储器(dram)模块,诸如双倍数据速率同步动态随机存取存储器(ddr sdram)。在一些实现方式中,主处理器16可以包括数字信号处理器(dsp)。在一些实现方式中,主处理器16可以包括专用集成电路(asic)。例如,主处理器16可以包括定制图像信号处理器。
[0134]
相机10还包括与主处理器16电连接的接口17,接口17用于与相机壳装置30电连接。可以理解,相机10上还包括其他接口,例如,用于将图像传输给其他设备的通信接口,用于允许用户控制图像捕获功能和/或观看图像的用户接口等等。
[0135]
相机10还包括用于为相机10供电的电池19。
[0136]
相机10的组件之间可以经由总线(图未标)彼此通信。
[0137]
相机壳装置30包括基座31及盖设于基座31上的面盖33。基座31可拆卸地安装于骑行设备1000的车架1010上,用于承载相机10。面盖33用于保护相机10。
[0138]
具体地,基座31包括主体311及卡扣313。主体311上设有容纳空间3111,用于容纳相机10。卡扣313的第一端通过枢轴与主体311转动连接。卡扣313的第二端与主体311卡扣连接,用于封闭容纳空间3111的一端,以防止收容于容纳空间3111内的相机10从基座31上脱离。当卡扣313的第二端与主体311分离时,主体311形成与容纳空间3111连通的开口(图
未标),相机10可从开口滑入容纳空间3111。
[0139]
由于主体311与卡扣313采用卡扣连接,方便将相机10组装于基座31上,或将相机10从基座31上拆卸下来。另外,卡扣313与主体311共同将相机10圈围住,有利于保护相机10,以及减小相机10在图像捕获过程中的震动而提高相机10俘获图像的质量。可以理解,基座31上还可以设置与相机10接触的减震结构,以减小相机10所受到的震动。
[0140]
可以理解,基座31可以省略卡扣313,相机10可通过其他方式固定于基座31上,例如,在实施方式中,相机10的壳体11上设有第一卡持部,容纳空间3111的内壁上设有第二卡持部,第一卡持部与第二卡持部卡持连接,第一卡持部与第二卡持部其中之一为弹性凸起,第一卡持部与第二卡持部中的另外一个为与弹性凸起卡持配合的卡持孔,当相机10安装于预设位置时,弹性凸起卡持于卡持孔中。
[0141]
主体311包括第一表面3113(如图12所示)、第二表面3114(如图12所示)与侧面3115(如图10所示)。第一表面3113与第二表面3114相对设置,容纳空间3111为贯通第一表面3113与第二表面3114的通孔或通槽。侧面3115的一端与第一表面3113连接,侧面3115的另一端与第二表面3114连接。当面盖33盖合于基座31上时,第一表面3113朝向面盖33设置。可以理解,容纳空间3111也可以为贯通第一表面3113但未贯通第二表面3114的凹槽。第一表面3113上还设有第一卡合部315(如图12所示),用于与面盖33卡合。
[0142]
面盖33与主体311转动连接,以使面盖33可开合地盖设于主体311上。当用户有操作容纳于容纳空间3111中的相机10需求时,用户可直接相对基座31翻转面盖33进行操作,如此,提高了相机壳装置30与摄像设备100的使用便利性。
[0143]
面盖33上设有镂空区域333。镂空区域333的位置对应相机10收容于容纳空间3111时镜头12所对应的位置,以在相机10收容于容纳空间时,方便用户操控相机10的镜头12等器件。面盖33为非透光材料制成。面盖33包括相对设置的第三表面3331(如图12所示)与第四表面3333(如图12所示),在面盖33盖合于基座31上时,第三表面3331朝向第一表面3113设置。光能够穿过镂空区域333进入位于容纳空间3111的相机10的相机镜头12。可以理解,在一些实施方式中,面盖33可以省略镂空区域333,面盖33可以由透光材料制成。
[0144]
面盖33还包括设于第三表面3331上的第二卡合部335(如图12所示)。面盖33盖合于基座31上时,第二卡合部335与第一卡合部315卡合于一起,减少了面盖33脱离基座31的可能性。
[0145]
本实施方式中,第一卡合部315为凹设于第一表面3113上的卡合孔,第二卡合部335为凸设于第三表面3331上的卡扣。
[0146]
可以理解,本技术对第一卡合部315设置于基座31上的位置不作限定,本技术对第二卡合部335设置于面盖33上的位置不作限定,第一卡合部315与第二卡合部335中的一个为卡合孔,第一卡合部315与第二卡合部335中的另一个为与卡合孔相配合的卡扣即可。
[0147]
相机壳装置30还包括辅处理器51、前照明灯54及光线传感器56。辅处理器51固定收容于基座31的主体311内。辅处理器51用于在相机10承载于基座31时与相机10电连接。
[0148]
尽管在图13中辅处理器51作为单个实体示出,但这仅用于说明目的。辅处理器51可以包括在相机壳装置30中提供信息处理能力的一个或多个处理器(逻辑电路)。辅处理器51可以为辅处理器51提供一个或多个计算功能。辅处理器51可以将命令信号操作/发送到辅处理器51的一个或多个部件以操作辅处理器51。
[0149]
辅处理器51可以包括存储器,诸如随机存取存储设备(ram)、闪存、或另一合适类型的存储设备,诸如非暂态计算机可读存储器。辅处理器51的存储器可以包括可以由辅处理器51的一个或多个处理器访问的可执行指令和数据。
[0150]
例如,辅处理器51可以包括一个或多个动态随机存取存储器(dram)模块,诸如双倍数据速率同步动态随机存取存储器(ddr sdram)。在一些实现方式中,辅处理器51可以包括数字信号处理器(dsp)。在一些实现方式中,辅处理器51可以包括专用集成电路(asic)。
[0151]
本实施方式中,前照明灯54设于主体311上,用于为用户提供照明,提高用户骑乘骑行设备的安全性。容纳空间3111与前照明灯54沿第一方向(例如图10、图11a、图12所示的x方向)排列,容纳空间3111靠近前照明灯54一端的内壁上凸设有接口317(如图12所示)。当相机10滑入容纳空间3111并到达预设位置时,接口317位于相机10与前照明灯54之间,相机10与前照明灯54沿第一方向(例如图10、图11a、图12所示的x方向)排列。本实施方式中,主体311上设置凹槽结构320(如图10所示),容纳空间3111与凹槽结构320沿第一方向间隔设置于主体311上,前照明灯54固定收容于凹槽结构320中。
[0152]
当相机10滑入容纳空间3111并到达预设位置时,接口317与相机10上的接口17实现对接,从而实现辅处理器51与主处理器16之间的电连接。由于容纳空间3111的内壁上凸设的接口317与相机10上的接口17直接电连接,而未将走线暴露于相机壳装置30外,简化了摄像设备100的走线结构。相机10滑至基座31上的预设位置后,相机10与相机壳装置30之间无需进一步插线进行电连接,简化了相机10组装于相机壳装置30上的组装步骤,提高了摄像设备100的组装效率。
[0153]
容纳空间3111的内壁包括底壁321、顶壁323与侧壁325,底壁321与顶壁323沿垂直第方向的第二方向(如图12所示的y方向)相对设置,侧壁325的一端与底壁321连接,侧壁325的另一端与顶壁323连接,侧壁325与容纳空间3111的开口相对设置。侧壁325设于容纳空间3111靠近前照明灯54的一端。第三方向与第一方向相垂直,第三方向与第二方向相垂直。
[0154]
设容纳空间3111沿垂直第一方向的第二方向(例如图12所示的y方向)的高度为h,底壁321与顶壁323之间的距离为h。从图11a所示的摄像设备100的前视图来看,前照明灯54大致呈矩形,将该矩形的对角线的交点视为前照明灯54的中心q。凹槽结构320对应前照明灯54呈矩形。请结合图11b,前照明灯54的中心q大致位于参考面f1(如图11a与图11b所示)上,其中,参考面f1垂直第二方向,参考面f1与容纳空间3111的底壁321的距离为h/2。换而言之,参考面f1与相机10贴紧底壁321的一面的距离为h/2。镜头12的光轴o不位于参考面f1上。
[0155]
可以理解,由于制造工艺等因素可能造成一定的误差,请参阅图11c,前照明灯54的中心q可以不位于参考面f1上,前照明灯54的中心q于参考面f1上的正投影(沿第二方向的正投影)为第一正投影q’,前照明灯54的中心q第一正投影q’之间的距离c1的范围为不大于2cm(厘米),前照明灯54的中心q与第一正投影q’之间的距离c1的优选范围为不大于5mm。换而言之,前照明灯54的中心q与参考面f1之间的距离不大于5mm。前照明灯54包括但不限定一个灯珠。相机10容纳于容纳空间3111时,参考面f1穿过相机10。
[0156]
可以理解,前照明灯54的形状不作限定,凹槽结构320对应前照明灯54的形状,例如,前照明灯54大致呈圆形时前照明灯54的中心q则为圆心。
[0157]
请继续参阅图11b,镜头12的光轴o于参考面f1上的正投影(沿第二方向的正投影)为第二正投影o’。前照明灯54的中心q与第二正投影o’之间的沿第一方向的距离c2的范围为大于15mm且小于50mm,且前照明灯54的中心q与第二正投影o’沿第一方向的距离c2的最优范围为大于15mm且小于30mm,以在前照明灯54开启时,减少前照明灯54的灯光范围与镜头12的成像视角发生重叠的可能性,减少前照明灯54对镜头12成像造成的干涉,提高相机10与摄像设备100的成像质量。
[0158]
可以理解,在前照明灯54的中心q不位于参考面f1上时,请参阅图11c,前照明灯54的中心q于参考面f1上的第一正投影为q’,镜头12的光轴o于参考面f1上的第二正投影为o’,q’与o’之间的距离c2的范围为大于15mm且小于50mm,q’与o’之间的距离c2的优选范围为大于15mm且小于30mm。换而言之,前照明灯54的中心q与虚拟面f2之间的距离范围为大于15mm且小于50mm,镜头12的光轴o位于虚拟面f2上,虚拟面f2与第一方向垂直。前照明灯54的中心q与虚拟面f2之间的距离范围优选为大于15mm且小于30mm。
[0159]
本实施方式中,相机壳装置30还包括设于主体311的侧面3115的光线传感器56(如图13所示)。光线传感器56与辅处理器51通信连接,光线传感器56用于检测相机壳装置30所处环境的环境亮度值并反馈给辅处理器51。辅处理器51将环境亮度值与预设环境亮度阈值进行比较。若环境亮度值小于预设环境亮度阈值时,辅处理器51确定相机壳装置30所处环境为低亮度环境,辅处理器51向前照明灯54发送开启信号,前照明灯54根据开启信号发光。光线传感器56检测到骑行设备1000在低亮度环境行驶时,前照明灯54会自动发光进行照明,给用户带来极大的便利性,提高了用户在低亮度环境中骑乘骑行设备1000的安全性。
[0160]
相机10通常包括非骑行模式与骑行模式等工作模式。相机10未安装在骑行设备1000上时,由于抖动不多或抖动强度不强,相机10可采用非骑行模式进行工作。相机10安装在骑行设备1000上时,由于骑行设备1000处于运动状态,抖动多且抖动强度比较大,相机10通常采用骑行模式进行工作,以能够采集到高质量影像。相机壳装置30还包括近距离无线通信芯片(例如nfc芯片)58,近距离无线通信芯片58设于卡扣313的第二端。相机10包括与主处理器16电连接的感应装置21,感应装置21用于感应近距离无线通信芯片58。
[0161]
当相机10滑入容纳空间3111并到达预设位置,且卡扣313的第二端与主体311卡扣连接时,相机10与近距离无线通信芯片58的距离小于预设距离阈值。若相机10与近距离无线通信芯片58的距离小于预设距离阈值,相机10的感应装置21会产生指示信号,意味着相机10已装入相机壳装置30的预设位置。所述指示信号用于指示相机10进入骑行模式。感应装置21将指示信号反馈至主处理器16。主处理器16根据指示信号控制相机10从非骑行模式进入骑行模式。由于相机10与近距离无线通信芯片58的距离小于预设距离阈值时,相机10可自行进入骑行模式进行拍摄,而无需用户手动操作,提高了摄像设备100的使用便捷性。
[0162]
相机壳装置30还包括固定收容于主体内的电源59,电源59与辅处理器51电连接。电源59固定收容于主体311内的,电源59与辅处理器51电连接。电源59用于为前照明灯54等器件进行供电。电源59可以是可充电电池或不可充电电池。电源59的电池容量是2000mah以上,即电源59的电池容量大于或等于2000mah。电源59的规格为18650规格和21700规格中的一种。为了提供电源59的续航能力,前照明灯54的亮度不能太大,前照明灯54通过配置设置相应的照明亮度80到750流明。前照明灯54的照明亮度优选范围为300
‑
500流明。
[0163]
相机壳装置30还包括设于侧面3115上的电源开关61,用于开启电源59。
[0164]
相机壳装置30还包括设于侧面3115上的电源指示灯62,电源指示灯62与电源59电连接,电源指示灯63用于指示电源59的状态。
[0165]
相机壳装置30还包括设于侧面3115上的充电端子63,用于为电源59充电。可以理解,本技术对充电端子63设于相机壳装置30的位置不作限定,例如,电源开关61也可以设于顶面3118或第二表面3114等。可以理解,面盖33可以省略。
[0166]
请参阅图14,本技术第四实施方式提供的摄像设备100与第一实施方式提供的摄像设备的结构的区别在于,相机壳装置与相机一体设置,即相机嵌设于相机壳装置内。由于相机壳装置与相机一体设置,简化了摄像设备100的结构。
[0167]
光线传感器56与主处理器16通信连接,光线传感器56用于检测摄像设备100所处环境的环境亮度值并反馈给主处理器16。主处理器16将环境亮度值与预设环境亮度阈值进行比较。若环境亮度值小于预设环境亮度阈值时,主处理器16确定摄像设备100所处环境为低亮度环境,主处理器16向前照明灯54发送开启信号,前照明灯54根据开启信号发光。光线传感器56检测到骑行设备在低亮度环境行驶时,前照明灯54会自动发光进行照明,给用户带来极大的便利性,提高了用户在低亮度环境中骑乘骑行设备的安全性。
[0168]
对于位置传感器14的功能与第一实施方式描述的相似,在此不作赘述。
[0169]
相机10包括相机镜头,前照明灯54的中心与虚拟面之间的距离的范围为大于15mm且小于50mm,相机10与前照明灯54沿第一方向排列设置,镜头的光轴位于虚拟面上,虚拟面与第一方向相垂直。前照明灯54的中心与虚拟面之间的距离的范围优选为大于15mm且小于30mm。
[0170]
相机10包括沿垂直第一方向的第二方向相对设置的底壁与顶壁,前照明灯54的中心与参考面之间的距离不大于2cm,参考面与第二方向垂直,参考面与底壁之间的距离为底壁与顶壁之间距离的二分之一。前照明灯54的中心与参考面之间的距离不大于5mm。
[0171]
摄像设备100还包括电源59,电源59与前照明灯54电连接,电源用于为前照明灯54及相机10供电。电源59的规格为18650规格和21700规格中的一种。
[0172]
电源59的电池容量是2000mah以上,前照明灯54的照明亮度范围为80
‑
750流明,前照明灯54的照明亮度范围优选为300
‑
500流明。
[0173]
以上所揭露的仅为本技术较佳实施例而已,当然不能以此来限定本技术之权利范围,因此依本技术权利要求所作的等同变化,仍属本技术所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。