1.本公开涉及光学控制装置、以及包括该光学控制装置的平视显示器装置。
背景技术:
2.近年来,开发出在设置于车辆的驾驶座前方的挡风玻璃显示速度等驾驶信息的平视显示器装置。在平视显示器装置中,为了在挡风玻璃显示驾驶信息,需要通过反射镜等反射部件反射由显示单元中形成的图像并投影到挡风玻璃上。
3.但是,在将平视显示器装置搭载在车辆的情况下,期望根据由驾驶姿势、驾驶员的交替等引起的视线位置的变更来高精度地改变反射部件的旋转角度,或者针对反射部件因车辆的振动而在旋转方向上振动而高精度地控制反射部件的旋转角度。
4.在专利文献1中,公开了如下的平视显示器装置:安装于反射部件的旋转轴的马达部采用步进马达,能够高精度地控制反射部件的旋转角度。在该平视显示器装置中,能够通过减速齿轮使步进马达的输出减速来使反射部件的旋转角度仅旋转正负2度的微小角度。
5.专利文献1:日本特开2011
‑
131651号公报
6.在如专利文献1的平视显示器装置那样使用了具有准确的定位控制功能的步进马达的情况下,能够高精度地控制反射部件的旋转角度。但是,步进马达与不具有定位控制功能的马达相比价格高,存在无法减少包含该步进马达的平视显示器装置的制造成本的问题。
7.另外,在将不具有定位控制功能的马达(例如,dc马达、超声波马达等)使用于平视显示器装置的情况下,需要在该马达设置进行定位控制的机构(例如,编码器等)。在将该机构设置于马达的情况下,存在马达本身的尺寸变大而无法小型化的问题。特别是,设置于车辆的平视显示器装置搭载于搭载空间有限的车辆的室内,因此要求毫米单位的小型化。
技术实现要素:
8.因此,本公开的目的在于提供能够以低成本高精度地控制光学部件(反射部件)的旋转角度的光学控制装置、以及包括该光学控制装置的平视显示器装置。
9.本公开的一个方式所涉及的光学控制装置是控制光学部件的旋转角度的光学控制装置,具备:保持部,保持光学部件;驱动部,设置于由保持部保持的光学部件的旋转轴,变更光学部件的旋转角度;角度检测部,设置于载置有驱动部的基板中比驱动部的外形更靠外侧的位置,检测光学部件的旋转角度;以及控制部,基于由角度检测部检测出的角度来驱动上述驱动部,并控制光学部件的旋转角度。
10.本公开的一个方式所涉及的平视显示器装置是将图像投影到规定的面以进行显示的平视显示器装置,具备:生成投影的图像的图像生成部;以及通过由保持部保持的光学部件反射由图像生成部生成的图像的、上述的光学控制装置。
11.根据本公开,能够以低成本高精度地控制光学部件的旋转角度,能够实现可能的光学控制装置、以及包括该光学控制装置的平视显示器装置。
附图说明
12.图1是本实施方式1所涉及的光学控制装置的立体图。
13.图2是包括本实施方式1所涉及的光学控制装置的平视显示器装置的示意图。
14.图3是用于对编码器的圆弧长度与直径的关系进行说明的图。
15.图4是用于对本实施方式1所涉及的光学控制装置的角度检测部进行说明的图。
16.图5是对通过伴随金属板的移动而磁气变化来检测反射部件的旋转角度的角度检测部进行说明的图。
17.图6是对通过伴随金属板的移动而电容变化来检测反射部件的旋转角度的角度检测部进行说明的图。
18.图7是对在保持部的底部设置有金属板的情况下的角度检测部进行说明的图。
19.图8是用于对本实施方式2所涉及的光学控制装置的角度检测部进行说明的图。
20.图9是表示以数字值检测反射部件的旋转角度的角度检测部的一个例子的图。
21.图10是表示以数字值检测反射部件的旋转角度的角度检测部的另一个例子的图。
具体实施方式
22.以下,参照附图并对本实施方式所涉及的光学控制装置以及包括该光学控制装置的平视显示器装置进行详细说明。此外,对于图中的相同或者相当部分,标注相同的附图标记而不重复其说明。
23.(实施方式1)
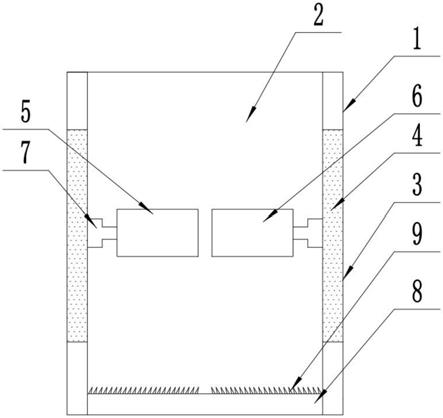
24.首先,图1是本实施方式1所涉及的光学控制装置的立体图。图2是包括本实施方式1所涉及的光学控制装置的平视显示器装置的示意图。图2所示的平视显示器装置100例如搭载在汽车等车辆,并具备:壳体1、图像生成部2以及反射部件4。
25.另外,图像生成部2例如由lcd2a和背光单元2b构成,并由lcd2a以及背光单元2b上生成投影到车辆的挡风玻璃6的图像。作为由图像生成部2生成的图像,例如有各种车辆信息以及导航信息等。此外,背光单元2b虽然未图示,但例如具备多个发光二极管、和使来自这些发光二极管的光入射到lcd2a的透镜。
26.壳体1例如由合成树脂构成,并在内部收容图像生成部2、反射部件4,在与挡风玻璃6对置的一侧设置有使图像的光l朝向挡风玻璃6出射的出射部7。该出射部7被透光性的罩8覆盖以防止灰尘进入壳体1内。
27.反射部件4例如是平面镜等光学部件,将来自图像生成部2的图像的光l朝向出射部7反射,投影到挡风玻璃6上。平视显示器装置100由此能够使车辆的乘客p与风景叠加地视觉确认图像生成部2生成的图像。
28.在平视显示器装置100中,期望根据由乘客p的驾驶姿势、驾驶员的交替等引起的视线位置的变更来高精度地改变反射部件4的旋转角度,或者针对反射部件4由于车辆的振动而在旋转方向上振动来高精度地控制反射部件4的旋转角度。
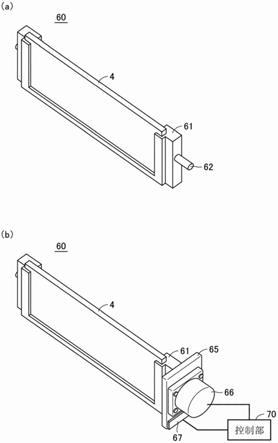
29.图1所示的光学控制装置60是控制反射部件4的旋转角度的控制装置。在图1的(a)中,仅图示出保持反射部件4的保持部61,对于变更保持部61的角度的致动器(驱动部)没有图示。在保持部61设置有用于使所保持的反射部件4旋转的旋转轴62。
30.在图1的(b)中,图示出在该旋转轴62安装了致动器66的光学控制装置60。致动器
66载置并固定于致动器保持架65(基板),夹着该致动器保持架65与保持部61的旋转轴62连接。
31.在致动器保持架65中,在比致动器66的外形更靠外侧的位置设置角度检测部67,检测反射部件4的旋转角度。控制部70基于由角度检测部67检测出的角度来驱动致动器66,并控制反射部件4的旋转角度。
32.在平视显示器装置100中,显示的项目增加,投影的面积变大,反射部件4也有大型的趋势。另一方面,平视显示器装置100的配置空间被限定,控制反射部件4的旋转角度的光学控制装置60的配置空间也要求省空间化。在使光学控制装置60小型化的情况下,保持反射部件4的保持部61的驱动机构也需要小型化,若致动器66使用步进马达,则伴随小型化而难以高精度化。
33.在本实施方式1所涉及的光学控制装置60中,通过致动器66使用dc马达、超声波马达从而实现小型化。此外,在致动器66使用dc马达的情况下,需要根据需要与齿轮组合。另外,超声波马达可以不与齿轮组合而直接以低速进行高转矩的驱动。此外,致动器66并不限于dc马达、超声波马达,也可以是ac马达等。
34.但是,在致动器66使用dc马达、超声波马达的情况下,如步进马达那样不具有定位控制的功能,因此需要另外设置编码器。在使用编码器来控制反射部件4的旋转角度的情况下,由于致动器66的小型化,编码器也需要小型化,因此存在控制反射部件4的旋转角度的精度降低的问题。
35.图3是用于对编码器的圆弧长度和直径的关系进行说明的图。在图3中,纵轴设定圆弧长度(单位mm),横轴设定编码器的圆盘直径(单位mm)。图表a表示每1度的圆弧长度的变化,图表b表示每0.5度的圆弧长度的变化。
36.例如,若将编码器的圆盘直径设为18mm(图3所示的虚线的位置),则每1度的圆弧长度约为0.36mm,每0.5度的圆弧长度约为0.18mm。因此,若通过致动器66的小型化而编码器也小型化,则编码器的圆盘直径也变小,因此每1度的圆弧长度或者每0.5度的圆弧长度变短。
37.这样,在为了检测旋转角度而使用编码器的情况下,分辨率由分割编码器的圆弧长度的精度决定。因此,若编码器的圆盘直径小径化,则为了提高分辨率而要求高的加工精度,成本变高。
38.因此,在本实施方式1所涉及的光学控制装置60中,即使在致动器66使用dc马达、超声波马达的情况下,也不使用编码器,在比致动器66的外形更靠外侧的位置设置有检测反射部件4的旋转角度的角度检测部67。
39.在光学控制装置60中,如图1的(b)所示,关于检测反射部件4的旋转角度的结构,并不是组装到监视旋转的齿轮、马达主体,而采用通过旋转的反射部件4或者保持部61的端部的变化来检测反射部件4的旋转角度的结构。因此,在光学控制装置60中,伴随致动器66的小型化,控制反射部件4的旋转角度的精度不会降低,成本也不会变高。
40.在保持部61设置导体部,角度检测部67基于伴随该导体部的移动的基于电磁的值的变化来检测反射部件4的旋转角度。具体而言,在保持部61的端部侧面或者底部设置作为导体部的金属板,通过角度检测部67检测伴随金属板的移动的磁气或者电容的变化。此外,如图1的(a)所示,如果保持部61是保持反射部件4的三个边的形状,则在保持部61的端部侧
面或者底部设置导体部,但也可以根据保持部61的形状在反射部件4的端部侧面或者底部直接设置导体部。另外,如果保持部61的材质是金属,则不需要在保持部61设置导体部。基于电磁的值包括基于电、磁、光的值。
41.以下,对角度检测部67的结构进一步进行详细说明。图4是用于对本实施方式1所涉及的光学控制装置60的角度检测部67进行说明的图。图4的(a)示出在保持部61的端部侧面设置有金属板63的图。图4的(b)示出从致动器保持架65侧观察的金属板63的图。
42.在图4的(b)中,为了容易理解设置于保持部61的金属板63的位置,用虚线示出设置于致动器保持架65的角度检测部67。在光学控制装置60中,通过与旋转轴62连接的致动器66(未图示)驱动位于y轴上的反射部件4,从而金属板63例如沿箭头方向移动。角度检测部67基于伴随金属板63的移动的磁气或者电容的变化来检测反射部件4的旋转角度。
43.图5是对通过伴随金属板63的移动而磁气变化来检测反射部件4的旋转角度的角度检测部67a进行说明的图。在图5所示的角度检测部67a中,计测根据伴随金属板63的移动的磁共振系统的吸收而变化的检测电压,并根据该计测结果通过运算检测反射部件4的旋转角度。
44.在角度检测部67a中,将驱动布线671、传感器布线672、673设置在与金属板63对置的面。由于由驱动布线671产生的磁场而在金属板63产生涡流,因此传感器布线672、673附近的磁场根据角度检测部67a与金属板63的重叠程度而变化。在角度检测部67a中,计测由于该磁场的变化而在传感器布线672、673中感应的电压的变化,并根据该计测结果通过运算检测反射部件4的旋转角度。此外,关于该方式的原理在美国专利第4737698号说明书中被详细说明。
45.图6是对通过伴随金属板63的移动而电容变化来检测反射部件4的旋转角度的角度检测部67b进行说明的图。在图6所示的角度检测部67b中,基于伴随金属板63的移动的与该金属板63之间产生的电容的变化来检测反射部件4的旋转角度。
46.在角度检测部67b中,以金属板63接地到gnd电位为前提,在与金属板63对置的面设置有电极675。角度检测部67b的电容根据该电极675与金属板63的重叠程度而变化。在角度检测部67b中,计测该电容的变化,并根据该计测结果通过运算检测反射部件4的旋转角度。此外,电极675是形成在角度检测部67b的基板的铜箔的焊盘图案,并被施加直流电压。
47.在图5和图6中,对将金属板63设置于保持部61的端部侧面的例子进行了说明,但对在保持部61的底部设置金属板的例子进行说明。图7是对在保持部61的底部设置有金属板63的情况下的角度检测部67c进行说明的图。图7的(a)示出在保持部61的底部设置有金属板63的图。图7的(b)示出从未设置致动器保持架65的一侧观察的保持部61的图。
48.在图7的(b)中,在与设置于保持部61的底部的金属板63的位置对置的位置设置有角度检测部67c,在该位置上将角度检测部67c固定于致动器保持架65。在光学控制装置60中,通过与旋转轴62连接的致动器66(未图示)驱动位于y轴上的反射部件4,从而金属板63例如沿箭头方向移动。由于伴随金属板63的移动而磁气或者电容变化,因此角度检测部67c基于该变化来检测反射部件4的旋转角度。
49.此外,设置角度检测部67c的位置并不限于致动器保持架65,只要是与保持部61的底面对置的位置,也可以是与致动器保持架65不同的基板。
50.如以上那样,本实施方式1所涉及的光学控制装置60是控制反射部件4的角度的光
学控制装置。光学控制装置60具备:保持部61、致动器66、角度检测部67、67a~67c以及控制部70。保持部61保持反射部件4。致动器66设置于在保持部61保持的反射部件4的旋转轴,变更反射部件4的旋转角度。角度检测部67、67a~67c设置于载置有致动器66的致动器保持架65中比致动器66的外形更靠外侧的位置,检测反射部件4的旋转角度。控制部70基于由角度检测部67、67a~67c检测出的角度来驱动致动器66,控制反射部件4的旋转角度。
51.由此,本实施方式1所涉及的光学控制装置60通过设置于比致动器66的外形更靠外侧的位置的角度检测部67、67a~67c检测反射部件4的旋转角度,因此能够以低成本高精度地控制反射部件4的旋转角度。
52.另外,角度检测部67a、67b也可以基于伴随设置于保持部61或者反射部件4的金属板63的移动的基于电磁的值的变化来检测反射部件4的旋转角度。由此,角度检测部67a、67b能够以简单的结构容易地检测反射部件4的旋转角度。
53.并且,角度检测部67a也可以基于检测电压来检测反射部件4的旋转角度,该检测电压根据伴随设置于保持部61的金属板63的移动的磁共振系统的吸收而变化。由此,角度检测部67a能够以简单的结构容易地检测反射部件4的旋转角度。
54.另外,角度检测部67b也可以基于与设置在保持部61的金属板63之间产生的电容的变化来检测反射部件4的旋转角度。由此,角度检测部67b能够以简单的结构容易地检测反射部件4的旋转角度。
55.并且,角度检测部67、67a、67b也可以设置于载置致动器66的致动器保持架65的相同的面。由此,能够实现将角度检测部67、67a、67b设置于致动器保持架65的光学控制装置60。
56.另外,角度检测部67c也可以设置于与保持部61或者反射部件4的底面对置的位置。由此,能够确保设置角度检测部67c的位置的自由度。
57.并且,本实施方式1所涉及的平视显示器装置100是将图像投影到规定的面以进行显示的平视显示器装置。平视显示器装置100具备:图像生成部2,生成投影的图像;以及上述光学控制装置60,通过由保持部61保持的反射部件4反射由图像生成部2生成的图像。由此,本实施方式1所涉及的平视显示器装置100能够高精度地控制反射部件4的旋转角度,因此能够以低成本稳定地显示图像。
58.(实施方式2)
59.在实施方式1所涉及的光学控制装置60中,对角度检测部67a、67b基于伴随设置于保持部61或反射部件4的金属板63的移动的基于电磁的值的变化来检测反射部件4的旋转角度的方式进行了说明。但是,检测反射部件的旋转角度的方式并不限定于此。在本实施方式2所涉及的光学控制装置中,对基于与保持部或反射部件的距离的变化来检测反射部件的旋转角度的方式进行说明。
60.图8是用于对本实施方式2所涉及的光学控制装置的角度检测部进行说明的图。此外,对于图8所示的光学控制装置中的与图4所示的光学控制装置相同的结构,标注相同的附图标记而不重复详细的说明。
61.图8示出从未设置致动器保持架65的一侧观察的保持部61的图。在图8中,以能够计测从保持部61的端部到致动器保持架65的一端的距离的方式设置角度检测部67d,在该位置上将角度检测部67d固定于致动器保持架65。在光学控制装置60中,通过与旋转轴62连
接的致动器66(未图示)驱动位于y轴上的反射部件4,从而设置于致动器保持架65的角度检测部67d与保持部61的距离变化。角度检测部67d是距离传感器,基于到保持部61的端部的距离的变化来检测反射部件4的旋转角度。
62.此外,角度检测部67d是能够使用光、超声波、电容等的变化来计测距离的距离传感器。在图8中,在能够计测与由保持部61的移动引起的距离的变化较大的保持部61的端部的距离的位置设置角度检测部67d。但是,设置角度检测部67d的位置只要能够检测由致动器66的驱动引起的保持部61的移动,则也可以设置于任何的位置。
63.如以上那样,在本实施方式2所涉及的角度检测部67d中,能够基于与保持部61或反射部件4的距离的变化来检测反射部件4的旋转角度。由此,本实施方式2所涉及的光学控制装置能够以低成本高精度地控制反射部件4的旋转角度。
64.此外,如图8所示,如果保持部61是保持反射部件4的三个边的形状,则角度检测部67d计测与保持部61的端部的距离,但根据保持部61的形状,角度检测部67d也可以计测与反射部件4的端部的距离。
65.另外,在角度检测部67d是能够使用光或超声波的变化来计测距离的距离传感器的情况下,无需在保持部61的端部侧面或者底部设置导体部。
66.(变形例1)
67.在上述的实施方式中,例如,对角度检测部67a、67b基于伴随设置于保持部61或反射部件4的金属板63的移动的基于电磁的值的变化,以模拟值检测反射部件4的旋转角度的例子进行了说明。但是,并不限于此,角度检测部也可以以数字值检测反射部件4的旋转角度。
68.具体而言,图9是表示以数字值检测反射部件4的旋转角度的角度检测部的一个例子的图。图9的(a)示出从致动器保持架65侧观察的在保持部61的端部侧面设置有反射板63a的图。图9的(b)图示出反射板63a。
69.在图9的(a)中,为了容易理解设置于保持部61的反射板63a的位置,用虚线示出设置于致动器保持架65的角度检测部67e。在光学控制装置60中,通过与旋转轴62连接的致动器66(未图示)驱动位于y轴上的反射部件4,从而反射板63a移动。
70.在反射板63a形成有条状的图案,反射光的强度逐步变化。角度检测部67e通过对来自反射板63a的反射光的强度逐步变化进行计数,从而能够以数字值检测反射部件4的旋转角度。此外,角度检测部67e具有光反射检测传感器。
71.图10是表示以数字值检测反射部件4的旋转角度的角度检测部的另一个例子的图。图10的(a)表示将图5所示的角度检测部67a变更为以数字值检测反射部件4的旋转角度的角度检测部67f。角度检测部67f在与金属板63对置的面设置驱动布线671、传感器布线677。
72.在传感器布线677中,通过缩短布线图案的周期来构成多周期性的电极,伴随金属板63的移动,在传感器布线677中感应的电压的变化成为阶段性的。因此,角度检测部67f能够以数字值检测反射部件4的旋转角度。
73.图10的(b)表示将图6所示的角度检测部67b变更为以数字值检测反射部件4的旋转角度的角度检测部67g。角度检测部67g将多个电极679在金属板63的移动方向上排列成一列而设置。
74.多个电极679通过在金属板63的移动方向上排列成一列而构成多周期性的电极,伴随金属板63的移动,多个电极679依次被充电,从而电容的变化成为阶段性的。因此,角度检测部67g能够以数字值检测反射部件4的旋转角度。
75.如以上那样,本变形例1所涉及的角度检测部67f~67g具有伴随金属板63的移动而基于电磁的值阶段性地变化的结构。由此,角度检测部67f~67g能够以数字值检测反射部件4的旋转角度。
76.(变形例2)
77.在上述的实施方式中,对将光学控制装置60使用于平视显示器装置100的结构进行了说明。但是,光学控制装置60除了平视显示器装置100以外,也同样能够使用于需要控制光学部件的旋转角度的装置。例如,作为该装置,也能够使用于进行光学平台的微调的装置、激光扫描仪装置等,特别是在汽车用途中,能够用于lidar(laser imaging detection and ranging:激光成像探测与测距)的激光的照射角度调整、前照灯的投影角度调整等的装置。
78.(变形例3)
79.在上述的实施方式中,对光学控制装置60控制反射部件4的旋转角度的结构进行了说明。但是,由于能够在保持部61保持反射部件4以外的光学部件,因此光学控制装置60也能够控制反射部件4以外的光学部件的旋转角度。作为反射部件4以外的光学部件,例如,有透镜(柱面透镜)、衍射光栅等。在光学控制装置60的光学部件使用衍射光栅的情况下,能够将该光学控制装置60利用于扫描衍射光栅来进行分光分析的装置。
80.应该认为本次公开的实施方式在全部方面是例示的,不起限制作用。本发明的范围并不是上述的说明,而由权利要求书表示,意在包括与权利要求书等同的含义以及在范围内的全部变更。
81.附图标记说明
[0082]1…
壳体;2
…
图像生成部;2b
…
背光单元;4
…
反射部件;6
…
挡风玻璃;7
…
出射部;8
…
罩;60
…
光学控制装置;61
…
保持部;62
…
旋转轴;63
…
金属板;63a
…
反射板;65
…
致动器保持架;66
…
致动器;67、67a~67g
…
角度检测部;70
…
控制部;100
…
平视显示器装置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。