1.本发明涉及无人机通信技术领域,具体为一种非确定干扰环境下的无人机鲁棒轨迹规划方法设计。
背景技术:
2.随着无人机系统迅猛发展,无人机通信技术逐渐成为学术界与工业界的研究热点。无人机提升了任务的成功率,广泛应用于军事侦察、战场评估、通信中继等领域。然而,由于无人机可利用的网络资源有限,无人机通信面临着严峻的考验。一方面,由于井喷式上升的业务,以及高度不确定性的战场环境,无人机需在极短时间内迅速作出轨迹规划,这考验着通信的时效性;另一方面,无人机作战数据传输链路在与地面控制站通信过程中极易受到外界干扰的影响,这考验着无人机的抗干扰特性。因此,在起飞前,提前对无人机做飞行轨迹规划是无人机作业的核心问题。
3.经过对现有技术检索发现,zeng y发表在2017年ieee transactions on wireless communications上的文章“energy
‑
efficient uav communication with trajectory optimization”提出了无人机的轨迹规划问题。在实际无人机通信中,无人机接收到的控制信令不仅受到来自地面控制站数据传输链路的影响,同时还受到来自地面辐射源的干扰信号影响。此外,由于现有探测设备精度的不足,往往难以得到准确的辐射源位置与功率信息。
技术实现要素:
4.本发明的目的在于针对现有技术的不足,提供一种非确定干扰环境下的无人机鲁棒轨迹规划方案,使得无人机在满足飞行速度/加速度约束及最大飞行能耗约束的前提下,降低了外界辐射源的干扰,合理的对无人机进行飞行轨迹规划,从而提升了接收信号的可靠性。
5.为实现以上发明目的,而采用的技术方案是:
6.一种非确定干扰环境下的无人机鲁棒轨迹规划方法,其特征在于,包括以下步骤:
7.s1:建立无人机轨迹规划系统模型;
8.s2:根据系统模型定义无人机鲁棒轨迹规划问题p1;
9.s3:引入基站距离向量其中第n元素表示无人机在时刻n到控制站的距离;干扰功率向量其中第n元素表示在时刻n无人机受到地面辐射源干扰的总功率;干扰距离矩阵其中第(m,n)个元素表示无人机在时刻n到第m个地面辐射源的距离。将问题p1转化为等价问题p2;
10.s4:利用s
‑
procedure算法,将问题p2转化为等价问题p3;
11.s5:将问题p3近似处理转换为凸问题p4;
12.s6:基于所述无人机轨迹规划模型p4,对优化目标进行求解,得到无人机最优飞行
轨迹。
13.s1具体为:
14.s1.1设无人机飞行高度为h、飞行时间为t,以预设的起点{x
i
,y
i
,h}(x
i
,y
i
代表起点的横纵坐标)向指定的终点{x
f
,y
f
,h}飞行(x
f
,y
f
代表终点的横纵坐标);地面有1个控制站,高度为0,水平位置为w
s
=[x
s
,y
s
](x
s
,y
s
代表控制站的横纵坐标);地面有m个辐射源,高度为0,水平位置为w
j,m
=[x
j,m
,y
j,m
](x
j,m
,y
j,m
代表地面辐射源的横纵坐标);辐射源的预估位置/功率与实际位置/功率的关系表示为:
[0015][0016][0017][0018][0019]
其中和表示第m个辐射源估计的位置及功率,δw
j,m
和δp
j,m
表示第m个辐射源位置及功率的估计误差,和ξ
m
表示第m个辐射源的误差上界,a
j,m
和ψ
j,m
表示第m个辐射源位置及功率的误差范围。
[0020]
s1.2将飞行时间t平均分成n个时刻,相邻时刻的长度δ=t/n;设无人机最小飞行速度为u
min
,最大飞行速度为u
max
,最大加速度为a
max
;在时刻n,无人机水平坐标为q[n]=[x[n],y[n]](x[n],y[n]代表位置的横纵坐标),速度为u[n]=[u
x
[n],u
y
[n]](u
x
[n],u
y
[n]为速度的横纵分量),加速度为a[n]=[a
x
[n],a
y
[n]](a
x
[n],a
y
[n]为加速度的横纵分量);无人机的飞行约束表示为:
[0021][0022]
u[n]=u[n
‑
1] a[n
‑
1]δ,n=2,3,...,n,
ꢀꢀꢀꢀ
(3b)
[0023][0024]
q[n]=q
f
,u[n]=u
f
,
ꢀꢀꢀ
(3d)
[0025][0026][0027][0028]
其中q
i
、u
i
和a
i
分别表示无人机初始时刻的位置、速度及加速度;q
f
和u
f
分别表示无人机最终的位置及速度;
[0029]
s1.3在第n个时刻,无人机到控制站和地面辐射源的距离分别表示为s1.3在第n个时刻,无人机到控制站和地面辐射源的距离分别表示为则无人机到地面控制站和地面辐射源的信道增益为:
[0030]
[0031][0032]
其中β0表示为当距离为1时的信道增益;
[0033]
s1.4无人机在飞行过程中所需总能耗为:
[0034][0035]
其中c1和c2代表无人机自身硬件相关常数,g代表重力加速度,代表无人机飞行动能消耗,j表示无人机的质量。
[0036]
s2具体为:
[0037]
无人机在第n个时刻,接收到最坏情况下的信噪比如下:
[0038][0039]
其中m为地面辐射源的数目,p0为地面控制站对无人机的上行传输功率,σ2表示加性高斯白噪声。推广到整个飞行过程,以最大化无人机接收到最坏情况下的平均信噪比为目标,该轨迹规划问题表示如下:
[0040]
p1:
[0041]
s.t.
[0042][0043]
u[n]=u[n
‑
1] a[n
‑
1]δ,n=2,3,...,n,
ꢀꢀꢀꢀꢀꢀꢀ
(8d)
[0044][0045]
q[n]=q
f
,u[n]=u
f
,
ꢀꢀꢀ
(8f)
[0046][0047][0048][0049]
其中γ为无人机的最大飞行能耗约束。
[0050]
s3具体为:
[0051]
将辐射源功率p
j,m
取以消除目标函数中δp
j,m
变量。采用冗余变量法,引入基站距离向量其中第n元素表示无人机在时刻n到控制站的距离;干扰功率向量其中第n元素表示在时刻n无人机受到地面辐射源干扰的总功率;干扰距离矩阵其中第(m,n)个元素表示无人机在时刻n到第m个地面辐
射源的距离。将问题p1转化为等价问题p2如下:
[0052]
p2:
[0053]
s.t.
[0054][0055][0056]
(8b)
‑
(8i)
ꢀꢀꢀꢀ
(9e)
[0057]
s4具体为:
[0058]
采用s
‑
procedure算法(为本领域已有算法),引用约束矩阵其中第(m,n)个元素表示无人机在时刻n关于第m个地面辐射源的约束。将半无限约束(9d)等价转化为如下约束:
[0059][0060][0061]
其中
[0062][0063]
且其中和表示第m个辐射源估计位置的横纵坐标;
[0064]
再引入n维速度向量其中第n元素表示在时刻n无人机的速度;轨迹规划p2转化为等价问题p3如下:
[0065]
p3:
[0066]
s.t.
[0067][0068][0069][0070]
(8c)
‑
(8h),(9b),(9c),(10),(11)(12f)
[0071]
s5具体为:
[0072]
在给定的第k次迭代点(i[n]
(k)
,l[n]
(k)
),将非凸函数用一阶泰勒展开得到全局下界值:
[0073][0074]
在给定的第k次迭代点u[n]
(k)
,将非凸约束(12c)、(12d)中||u[n]||2用一阶泰勒展开如下:
[0075][0076]
在给定的第k次迭代点(x[n]
(k)
,y[n]
(k)
),将非凸约束(10)中非线性项c
m
[n]用一阶泰勒展开如下:
[0077][0078]
轨迹规划p3转化为近似凸问题p4如下:
[0079]
p4:
[0080]
s.t.
[0081][0082][0083]
(8c)
‑
(8h),(9b),(9c),(11),(12b),(12e)
ꢀꢀꢀꢀꢀ
(13e)
[0084]
其中
[0085][0086]
此时,通过cvx工具箱解出轨迹的最优解。
[0087]
s6具体包括以下步骤:
[0088]
s6.1.初始化无人机的位置、速度、加速度分别为q
(0)
、u
(0)
和a
(0)
,目标函数为迭代次数k=0,设置最大迭代次数k
max
,迭代精度阈值θ1;
[0089]
s6.2.给定第k次迭代无人机的位置、速度、加速度q
(k)
、u
(k)
和a
(k)
代入轨迹规划优化模型p1进行求解,得到第k 1次迭代后无人机的位置、速度、加速度的最优解为q
(k 1)
、u
(k 1)
和a
(k 1)
;
[0090]
s6.3.判断是否满足k≥k
max
,或如果是,得到优化后的位置、速度、加速度q
(*)
、u
(*)
和a
(*)
;如果否,则更新迭代次数k=k 1,并重复步骤s6.2和s6.3。
[0091]
本发明提出一种非确定干扰环境下的无人机鲁棒轨迹规划方法,来最大化飞行过程中最坏情况下的平均信噪比,从而实现了无人机飞行轨迹的合理规划。
[0092]
本发明有益效果:本发明所述的无人机鲁棒轨迹规划方法,首先构造关于非确定干扰环境下无人机飞行轨迹的优化模型,然后基于模型特性引入冗余变量,并采用s
‑
procedure算法和连续凸优化算法迭代求解上述问题,直至算法收敛。该方法在提升无人机
接收到控制信号可靠性且满足系统飞行速度/加速度约束及最大飞行能耗约束的前提下,实现有飞行轨迹的合理规划。
附图说明
[0093]
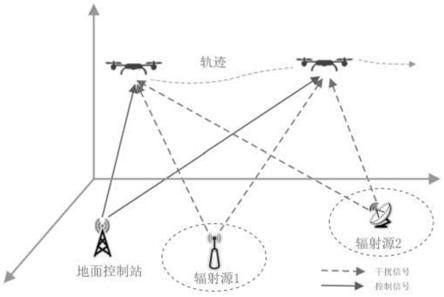
图1是本发明所述实施例的系统模型图。
[0094]
图2是本发明所述实施例采用该方法的算法流程图。
[0095]
图3是本发明所述实施例中无人机飞行轨迹图。
[0096]
图4是本发明所述实施例中无人机通信性能图。
具体实施方式
[0097]
下面结合附图详细描述本发明,本发明的目的和效果将变得更加明显。
[0098]
本实施例提供一种非确定干扰环境下的无人机鲁棒轨迹规划方法,所述方法包括以下步骤:
[0099]
s1:建立无人机轨迹规划系统模型;
[0100]
如图1所示,考虑一个三维的坐标系统。设无人机飞行高度为h、飞行时间为t,以预设的起点{x
i
,y
i
,h}(x
i
,y
i
代表起点的横纵坐标)向指定的终点{x
f
,y
f
,h}飞行(x
f
,y
f
代表终点的横纵坐标);地面有1个控制站,高度为0,水平位置为w
s
=[x
s
,y
s
](x
s
,y
s
代表控制站的横纵坐标);地面有m个辐射源,高度为0,水平位置为w
j,m
=[x
j,m
,y
j,m
](x
j,m
,y
j,m
代表地面辐射源的横纵坐标);辐射源的预估位置/功率与实际位置/功率的关系表示为:
[0101][0102][0103][0104][0105]
其中和表示第m个辐射源估计的位置及功率,δw
j,m
和δp
j,m
表示第m个辐射源位置及功率的估计误差,和ξ
m
表示第m个辐射源的误差上界,a
j,m
和ψ
j,m
表示第m个辐射源位置及功率的误差范围。
[0106]
将t平均分成n个时刻,相邻时刻的长度δ=t/n;设无人机最小飞行速度为u
min
,最大飞行速度为u
max
,最大加速度为a
max
;在时刻n,无人机水平坐标为q[n]=[x[n],y[n]](x[n],y[n]代表位置的横纵坐标),速度为u[n]=[u
x
[n],u
y
[n]](u
x
[n],u
y
[n]为速度的横纵分量),加速度为a[n]=[a
x
[n],a
y
[n]](a
x
[n],a
y
[n]为加速度的横纵分量);无人机的飞行约束表示为:
[0107][0108]
u[n]=u[n
‑
1] a[n
‑
1]δ,n=2,3,...,n,
ꢀꢀꢀꢀꢀꢀ
(3b)
[0109][0110]
q[n]=q
f
,u[n]=u
f
,
ꢀꢀꢀꢀꢀꢀ
(3d)
[0111][0112][0113][0114]
其中q
i
、u
i
和a
i
分别表示无人机初始时刻的位置、速度及加速度;q
f
和u
f
分别表示无人机最终的位置及速度;
[0115]
在第n个时刻,无人机到控制站和地面辐射源的距离分别表示为在第n个时刻,无人机到控制站和地面辐射源的距离分别表示为则无人机到地面控制站和地面辐射源的信道增益为:
[0116][0117][0118]
其中β0表示为当距离为1时的信道增益;
[0119]
无人机在飞行过程中所需总能耗为:
[0120][0121]
其中c1和c2代表无人机自身硬件相关常数,g代表重力加速度,代表无人机飞行动能消耗,j表示无人机的质量。
[0122]
s2:根据系统模型定义无人机鲁棒轨迹规划问题p1;
[0123]
无人机在第n个时刻,接收到最坏情况下的信噪比如下:
[0124][0125]
其中m为地面辐射源的数目,p0为地面控制站对无人机的上行传输功率,σ2表示加性高斯白噪声。推广到整个飞行过程,以最大化无人机接收到最坏情况下的平均信噪比为目标,该轨迹规划问题表示如下:
[0126]
p1:
[0127]
s.t.
[0128][0129]
u[n]=u[n
‑
1] a[n
‑
1]δ,n=2,3,...,n,
ꢀꢀꢀꢀ
(8d)
[0130][0131]
q[n]=q
f
,u[n]=u
f
,
ꢀꢀꢀꢀꢀꢀꢀ
(8f)
[0132][0133][0134][0135]
其中γ为无人机的最大飞行能耗约束。
[0136]
s3:将辐射源功率p
j,m
取以消除目标函数中δp
j,m
变量。引入基站距离向量其中第n元素表示无人机在时刻n到控制站的距离;干扰功率向量其中第n元素表示在时刻n无人机受到地面辐射源干扰的总功率;干扰距离矩阵其中第(m,n)个元素表示无人机在时刻n到第m个地面辐射源的距离。将问题p1转化为等价问题p2如下:
[0137]
p2:
[0138]
s.t.
[0139][0140][0141]
(8b)
‑
(8i)
ꢀꢀꢀꢀꢀ
(9e)
[0142]
s4:利用s
‑
procedure算法,将问题p2转化为等价问题p3;
[0143]
采用s
‑
procedure算法,引用约束矩阵其中第(m,n)个元素表示无人机在时刻n关于第m个地面辐射源的约束。将半无限约束(9d)等价转化为如下约束:
[0144][0145][0146]
其中
[0147][0148]
且其中和表示第m个辐射源估计位置的横纵坐标;
[0149]
再引入n维速度向量其中第n元素表示在时刻n无人机的速度;轨迹规划p2转化为等价问题p3如下:
[0150]
p3:
[0151]
s.t.
[0152][0153][0154][0155]
(8c)
‑
(8h),(9b),(9c),(10),(11)
ꢀꢀꢀꢀ
(12f)
[0156]
s5:将问题p3近似处理转换为凸问题p4;
[0157]
在给定的第k次迭代点(i[n]
(k)
,l[n]
(k)
),将非凸函数用一阶泰勒展开得到全局下界值:
[0158][0159]
在给定的第k次迭代点u[n]
(k)
,将非凸约束(12c)、(12d)中||u[n]||2用一阶泰勒展开如下:
[0160][0161]
在给定的第k次迭代点(x[n]
(k)
,y[n]
(k)
),将非凸约束(10)中非线性项c
m
[n]用一阶泰勒展开如下:
[0162][0163]
轨迹规划p3转化为近似凸问题p4如下:
[0164]
p4:
[0165]
s.t.
[0166][0167][0168]
(8c)
‑
(8h),(9b),(9c),(11),(12b),(12e)
ꢀꢀꢀꢀ
(13e)
[0169]
其中
[0170][0171]
此时,通过cvx工具箱解出轨迹的最优解。
[0172]
s6:基于所述无人机轨迹规划模型p4,对优化目标进行求解,得到无人机最优飞行轨迹。如图2所示,具体步骤为:
[0173]
s6.1.初始化无人机的位置、速度、加速度分别为q
(0)
、u
(0)
和a
(0)
,目标函数为迭代次数k=0,设置最大迭代次数k
max
,迭代精度阈值θ1;
[0174]
s6.2.给定第k次迭代无人机的位置、速度、加速度q
(k)
、u
(k)
和a
(k)
代入轨迹规划优化模型p1进行求解,得到第k 1次迭代后无人机的位置、速度、加速度的最优解为q
(k 1)
、u
(k 1)
和a
(k 1)
;
[0175]
s6.3.判断是否满足k≥k
max
,或如果是,得到优化后的位置、速度、加速度q
(*)
、u
(*)
和a
(*)
;如果否,则更新迭代次数k=k 1,并重复步骤s6.2和s6.3。
[0176]
图3将本发明方案与基准轨迹规划方案性能进行比较,通过matlab对所设计方案的仿真。参数具体设置为:飞行高度h=100m,起点坐标为q
i
=(100,100)m,终点为q
f
=(800,800)m;地面控制单元坐标和功率分别为(0,0,0)m和p0=10w;3个辐射源以的功率分布于坐标为的地面上;辐射源功率的误差为ξ
m
=0.02w;飞行总时间t=30s。其他参数如表1所示:
[0177]
表1仿真参数
[0178][0179]
图3给出了无人机的飞行轨迹图,其中横纵坐标表示为无人机的飞行坐标。由图可以知道:对于相同的网络场景,本发明方法提出的无人机轨迹规划路径能巧妙地远离辐射源,并与辐射源距离大于基准轨迹规划方案。
[0180]
图4给出了无人机飞行过程中的平均最坏情况下的信噪比,其中横坐标为无人机的飞行能耗上限,纵坐标为平均最坏情况下的信噪比。可以看出,对于相同的网络场景,本发明方法的系统性能优于基准轨迹规划方案的性能。
[0181]
通过前面的性能仿真比较,本发明的方法不仅能满足系统飞行速度/加速度约束及最大飞行能耗限制,而且能提升网络的通信性能,以实现飞行轨迹的合理规划。可以预见本发明方法能很好地适应未来基于无人机的移动通信技术,使无人机的性能得到提升。
[0182]
本发明不仅局限于上述具体实施方式,本领域一般技术人员根据本发明公开的内容,可以采用其它多种具体实施方案实施本发明。因此,凡是采用本发明的设计结构和思路,做一些简单的变化或更改的设计,都落入本发明保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。