1.本发明属于航天器自主导航领域,涉及一种航天器惯性/恒星星光矢量/太阳多普勒速度组合导航方法,适用于航天器高精度自主定位和定姿。
背景技术:
2.近年来,惯性/天文组合导航系统以其自主性强,误差不随时间积累,隐蔽性好等特点,在航空航天及国防军事领域得到了广泛应用。传统的惯性/天文组合导航常采用惯导解算得到的姿态与天文导航解算的姿态做差来修正惯导的姿态误差。但该种方法仅能修正姿态误差,对位置和速度误差的修正作用较小。而速度误差是影响惯性/天文组合导航的重要因素,因此研究一种能同时修正速度和姿态的组合导航方法具有十分重要的意义。太阳多普勒速度是通过观测航天器与太阳的相对运动引起的多普勒频移量,来获得航天器相对太阳的径向速度。该种方法可以有效提高航天器速度精度,进而提升位置精度。因此本发明提出一种惯性/恒星星光矢量/太阳多普勒速度组合导航方法,来同时对系统位置,速度和姿态进行修正,提升航天器导航精度。
技术实现要素:
3.本发明要解决的技术问题是:克服传统惯性/天文组合导航仅能修正姿态,无法修正位置和速度的问题,为航天器提供一种航天器惯性/恒星星光矢量/太阳多普勒速度组合导航方法,以恒星星光矢量修正姿态误差,以太阳多普勒速度修正速度误差,为航天器提供高精度的位置,速度和姿态信息。
4.本发明解决其技术问题所采用的技术方案为:以平台失准角,速度误差,位置误差,陀螺漂移和加计偏置为系统状态量,以恒星星光矢量,太阳多普勒速度为量测,利用ukf对系统状态量进行估计。
5.包括以下步骤:
6.步骤1:以航天器的平台失准角,速度误差,位置误差,陀螺漂移和加计偏置为状态量,建立航天器的状态方程;
[0007][0008]
其中状态量为[φ
e φ
n φ
u
]
t
表示东向,北向和天向的数学平台失准角,分别为在东向,北向和天向的速度误差,[δlδλδh]
t
表示在经度,纬度和高度方向的位置误差,[ε
e
,ε
n
,ε
u
]
t
为分别在东北天向的陀螺漂移,为东北天向的加计偏置,为t时刻x(t)的导数,f(t)为系统状态转移函数,w(t)为系统过程噪声。
[0009]
步骤2:利用星敏感器获得恒星星光矢量和光谱仪获得的太阳多普勒速度,将二者作为系统量测量,根据量测量与状态量间的关系,建立基于恒星星光矢量和太阳多普勒速
度的量测方程;
[0010]
星敏感器可以拍摄得到星图,进而得到恒星在星敏感器坐标系(s系)下的星光矢量信息(s
s
),经过星图识别和星图匹配等处理过程,可得该颗恒星在惯性系下的星光矢量信息(s
i
),由s
i
和s
c
之间的关系,可以得到星敏感器坐标系相对于惯性坐标系的转移矩阵之间的关系,可以得到星敏感器坐标系相对于惯性坐标系的转移矩阵中含航天器位置,速度和姿态信息。具体过程如下:
[0011]
星敏感器提供的星敏感器坐标系下的星光方向矢量为[x
c y
c
],结合敏感器的焦距信息(f),可以计算得到恒星方向矢量在像平面的三维位置坐标s
s
:
[0012][0013]
s
s
和s
i
之间的关系可以表示为:
[0014][0015]
其中为星敏感器安装矩阵,为导航系(即n系)相对本体系(即b系)的旋转矩阵,含航天器姿态信息,为地球系(即e系)相对n系的旋转矩阵,含航天器位置信息,为i系相对e系的旋转矩阵;
[0016]
因此基于恒星星光矢量的系统量测方程可以表示为:
[0017]
z
1,k
=h1(x
k
) v
1,k
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0018]
式中,h1(
·
)表示基于恒星星光矢量的量测方程,v
1,k
表示恒星星光矢量的量测误差。
[0019]
基于太阳多普勒速度的天文导航方法是通过观测航天器与太阳的相对运动引起的多普勒频移量,可以获得航天器相对于太阳的径向速度。设f
e
是估计的恒星发出的光谱频率,通过长期天文观测获得,f
r
为航天器接收到的光谱频率,则航天器相对太阳的径向速度可以表示为:
[0020]
v
r
=c
·
(f
r
‑
f
e
)/f
e
ꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0021]
其中c为光速。通过观测一个光源仅能获得航天器相对此光源的径向速度,通过观测三个或三个以上的导航天体可以获得航天器的速度矢量。将径向速度作为量测量z
v
,多普勒速度的量测方程可以被写作:
[0022][0023]
进一步简化式(6)可以表示为:
[0024]
z
v
=h2(x
k
) υ
m
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0025]
式中v
se
为航天器相对地球的速度矢量,v
e
表示地球相对太阳的速度矢量,r
ss
表示航天器相对太阳的位置矢量,h2(
·
)表示基于太阳多普勒速度的量测方程,υ
m
是多普勒速度量测噪声。
[0026]
综上,基于恒星星光矢量和太阳多普勒速度的惯性/恒星星光矢量/太阳多普勒速度的组合导航系统量测方程可以写作:
[0027][0028]
步骤3:由于步骤1得出的状态方程和步骤2的量测方程都为非线性,因此采用ukf作为滤波方法来估计航天器的位置,速度和姿态信息。
[0029]
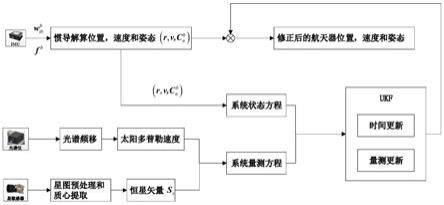
本发明的原理是:以平台失准角,航天器速度误差,位置误差,陀螺漂移和加计偏置为系统状态量,根据惯导解算原理建立系统状态方程;以恒星星光矢量和太阳多普勒速度为量测,建立系统量测模型,由于系统状态方程和量测方程均为非线性方程,因此利用无迹卡尔曼滤波(ukf)对系统状态量进行估计。
[0030]
本发明与现有技术相比的优点在于:
[0031]
(1)传统惯性/天文组合导航仅能利用天文信息进行姿态修正,无法直接对航天器位置和速度进行修正,而速度误差是影响惯性/天文组合导航精度的重要因素,本发明方法提出利用太阳多普勒速度量测辅助修正速度信息,通过引入多普勒速度量测,实现对速度的修正,弥补传统惯性/天文组合导航无法修正速度的缺点。
[0032]
(2)本发明的方法利用恒星星光矢量获得高精度的姿态信息,利用多普勒速度获得速度信息,实现同时修正航天器位置,速度和姿态的目的。
附图说明
[0033]
图1为本发明中航天器惯性/恒星星光矢量/太阳多普勒速度组合导航方法流程图。
具体实施方式
[0034]
下面结合附图及实施例对本发明进行详细的说明,应当理解,此处所描述的具体实施例仅仅用以解释本发明,不用于限定本发明。
[0035]
图1给出了航天器惯性/恒星星光矢量/太阳多普勒速度组合导航方法流程图。具体实施过程:
[0036]
1.以航天器的平台失准角,速度误差,位置误差,陀螺漂移和加计偏置为状态量,建立航天器的状态方程;
[0037]
系统状态方程可以表示为:
[0038][0039]
其中状态量为[φ
e
φ
n
φ
u
]
t
表示东向,北向和天向的数学平台失准角,分别为在东向,北向和天向的速度误差,[δl δλ δh]
t
表示在经度,纬度和高度方向的位置误差,[ε
e
,ε
n
,ε
u
]
t
为分别在东北天向的陀螺漂移,为东北天向的加计偏置,为t时刻x(t)的导数,f(t)为系统状态转移函数,w(t)为系统过程噪声。
[0040]
(1)平台失准角方程
[0041][0042]
其中[φ
e φ
n φ
u
]
t
表示东向,北向和天向的数学平台失准角,[v
e v
n δv
u
]
t
表示东向,北向和天向的速度,为分别在东向,北向和天向的速度误差,l和λ分别表示当地经纬度,[δl δλ δh]
t
表示在经度,纬度和高度方向的位置误差,h为距离当地水平面的高度,[ε
e ε
n ε
u
]
t
为东北天向的陀螺漂移,ω
ie
为地球自转角速度,e为克拉索夫斯基椭圆度,r
n
=r
e
(1 e sin2l),r
m
=r
e
(1
‑
2e 3e sin2l)分别为沿子午圈和卯酉圈的主曲率半径。
[0043]
(2)速度误差方程
[0044][0045]
其中,f
e
,f
n
,f
u
分别为东北天方向上的比力,分别为东北天向的加计常值偏置。
[0046]
(3)位置误差方程
[0047][0048]
(4)惯性器件误差方程
[0049][0050]
2.利用星敏感器获得恒星星光矢量和光谱仪获得的太阳多普勒速度,将二者作为系统量测量,根据量测量与状态量间的关系,建立基于恒星星光矢量和太阳多普勒速度的
量测方程;
[0051]
星敏感器可以拍摄得到星图,进而得到恒星在星敏感器坐标系(s系)下的星光矢量信息(s
s
),经过星图识别和星图匹配等处理过程,可得该颗恒星在惯性系下的星光矢量信息(s
i
),由s
i
和s
c
之间的关系,可以得到星敏感器坐标系相对于惯性坐标系的转移矩阵之间的关系,可以得到星敏感器坐标系相对于惯性坐标系的转移矩阵中含航天器位置,速度和姿态信息。具体过程如下:
[0052]
星敏感器提供的星敏感器坐标系下的星光方向矢量为[x
c y
c
],结合敏感器的焦距信息(f),可以计算得到恒星方向矢量在像平面的三维位置坐标s
s
:
[0053][0054]
s
s
和s
i
之间的关系可以表示为:
[0055][0056]
其中为星敏感器安装矩阵,为导航系(即n系)相对本体系(即b系)的旋转矩阵,含航天器姿态信息,为地球系(即e系)相对n系的旋转矩阵,含航天器位置信息,为i系相对e系的旋转矩阵;
[0057]
因此基于恒星星光矢量的系统量测方程可以表示为:
[0058]
z
1,k
=h1(x
k
) v
1,k
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0059]
式中,h1(
·
)表示基于恒星星光矢量的量测方程,v
1,k
表示恒星星光矢量的量测噪声。
[0060]
以太阳多普勒速度为量测的天文导航方法,是通过观测航天器与太阳的相对运动引起的多普勒频移测量,可以获得航天器相对于太阳的径向速度。设f
e
是估计的太阳发出的光谱频率,通过长期天文观测获得,f
r
为航天器接收到的光谱频率,则航天器相对太阳的径向速度可以表示为:
[0061]
v
r
=c
·
(f
r
‑
f
e
)/f
e
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0062]
其中c为光速。通过观测一个光源仅能获得航天器相对此光源的径向速度,通过观测三个或三个以上的导航天体可以获得航天器的速度矢量。将径向速度作为量测量z
v
,多普勒速度的量测方程可以被写作:
[0063][0064]
进一步简化式(18)可以表示为:
[0065]
z
v
=h2(x
k
) υ
m
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(19)
[0066]
式中,v
se
为航天器相对地球的速度矢量,v
e
表示地球相对太阳的速度矢量,r
ss
为航天器相对太阳的位置矢量,h2(
·
)表示基于太阳多普勒速度的量测方程,υ
m
是多普勒速度量测噪声。
[0067]
综上,基于恒星星光矢量和太阳多普勒速度的惯性/恒星星光矢量/太阳多普勒速度的组合导航系统量测方程可以写作:
[0068][0069]
3.由于步骤1得出的状态方程和步骤2的量测方程都为非线性,因此采用ukf作为滤波方法来估计航天器的位置,速度和姿态信息。
[0070]
如上所述,基于恒星星光矢量和太阳多普勒速度的惯性/恒星星光矢量/太阳多普勒速度组合导航方法的状态方程和量测方程都是非线性的,传统卡尔曼滤波方法仅能针对线性系统进行处理,对非线性系统的处理能力有限,因此本发明采用无迹卡尔曼滤波(unscented kalman filter,ukf)来对系统状态量进行估计,解算航天器的位置、速度和姿态,并修正航天器的姿态误差和惯性器件误差。
[0071]
它的主要步骤为:在附近选取一系列样本点,使这些样本点的均值和协方差分别为和p(k|k),设为n
×
1向量,则可以推导出2n 1个样本点和它对应的权重:
[0072][0073]
式中,n是状态量x的维数,τ是刻度参数,当状态量噪声服从高斯分布时,通常选取n τ=3;表示的第i维列向量,w
i
是权值,代表的是第i个sigma点。标准ukf算法如下。
[0074]
①
初始化
[0075][0076]
②
计算采样点
[0077][0078]
③
时间更新
[0079]
χ
i,k|k
‑1=f(χ
i,k
‑1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(24)
[0080][0081][0082]
z
i,k|k
‑1=h(χ
k|k
‑1,k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(27)
[0083][0084]
④
量测更新
[0085][0086][0087]
k
k
=p
xy,k
p
yy,k
‑1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(31)
[0088][0089]
p
k
=p
k|k
‑1‑
k
k
p
yy,k
k
kt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(33)
[0090]
式中,q
k
表示过程噪声误差方差阵,r
k
表示量测噪声误差方差阵。
[0091]
本发明所提惯性/恒星星光矢量/太阳多普勒速度组合导航中,以惯导为主导航系统,利用恒星星光矢量提供姿态信息,利用太阳多普勒速度提供速度信息,实现对航天器位置,速度和姿态的同时修正,弥补传统惯性/天文组合导航无法直接修正位置和速度的缺点。
[0092]
本发明说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
[0093]
提供以上实施例仅是为了描述本发明的目的,而并非要限制本发明的范围。本发明的范围由所附权利要求限定。不脱离本发明的精神和原理而做出的各种等同替换和修改,均应涵盖在本发明的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。