1.本发明相关于一种可动态控制最小工作周期的方法和相关半桥式升压电路,尤其涉及一种依据负载的运作阶段来动态控制最小工作周期的方法和相关半桥式升压电路。
背景技术:
2.马达是一种将电能转换为动能的电子装置,常见应用包括直流马达、交流马达及步进马达等。在许多马达应用范例中,脉宽调变(pulse width modulation)技术常被用来调整流经马达的电流大小,以此达到节省电能及控制转速的目的。脉宽调变技术主要是藉由功率开关的高频切换来调整电源供应器于一周期性方波中输送能量至负载的时间比,而此输送能量的时间相对于周期长度的比值又通称为工作周期(duty cycle,也称“占空比”)。半桥式自举(bootstrap)电路常用来驱动马达,其包括一启动电容、一上臂开关和一下臂开关。上臂开关和下臂开关以图腾柱式(totem pole)耦接于一总线电压和一接地电压之间,两开关之间的中间点作为输出端。当上臂开关断开而下臂开关导通时,直流电源可对启动电容充电;当上臂开关导通而下臂开关断开时,启动电容内存能量可将上臂开关维持在导通状态,进而将总线电压传送至输出端以提供一输出电压。
3.为了确保启动电容内存有足够的电荷以导通上臂开关,一般会采用最小工作周期(minimum duty,md)机制来限制下臂开关的最少导通时间。现有技术半桥式升压电路会采用固定值的最小工作周期曲线来控制下臂开关,当输出功率越高时等同限制了马达的最大输出功率。因此,需要一种可动态控制最小工作周期的半桥式升压电路。
技术实现要素:
4.本发明提供一种可动态控制最小工作周期的方法,其包括在一充电周期内,通过断开一上臂开关并导通一下臂开关来让一直流电压对一电容充电;在接续该充电周期的一放电周期内,通过导通该上臂开关并断开该下臂开关来让该电容内存能量对该上臂开关的寄生电容充电以将该上臂开关维持在导通,并让一总线电压通过导通的该上臂开关传送到一输出端以驱动一马达;依据该输出端的状态来调整该上臂开关在该放电周期内的导通时间;以及依据一动态最小工作周期曲线来限制该下臂开关在该充电周期内的导通时间。其中,当该马达的转速不大于一第一转速时,该动态最小工作周期曲线的值不大于一最大值;当该马达的转速等于该第一转速时,该动态最小工作周期曲线的值等于该最大值;且当该马达的转速大于该第一转速时,该动态最小工作周期曲线的值不大于该最大值。
5.本发明提供一种可动态控制最小工作周期的半桥式升压电路,其包括一输出端、一上臂开关、一下臂开关、一电容,以及一控制电路。该输出端用来提供一输出电压以驱动一马达。该上臂开关用来选择性地导通一总线电压和该输出端之间的信号路径,而该下臂开关用来选择性地导通该输出端和一接地电压之间的信号路径。该电容的第一端选择性地耦接至一直流电压,而其第二端耦接至该输出端。该控制电路用来在一充电周期断开该上臂开关并导通该下臂开关以将该输出端耦接至该接地电压,并让该直流电压对该电容充
电;在接续该充电周期的一放电周期内导通该上臂开关并断开该下臂开关以将该输出端耦接至该总线电压,并让该电容内存能量对该上臂开关的寄生电容充电以将该上臂开关维持在导通;依据该输出端的状态来调整该上臂开关在该放电周期内的导通时间;以及依据一动态最小工作周期曲线来限制该下臂开关在该充电周期内的导通时间。其中,当该马达的转速不大于一第一转速时,该动态最小工作周期曲线的值不大于一最大值;当该马达的转速等于该第一转速时,该动态最小工作周期曲线的值等于该最大值;当该马达的转速大于该第一转速且不大于一第二速度时,该动态最小工作周期曲线的值不大于该最大值;当该马达的转速大于该第二转速时,该最小工作周期曲线的值为0;且该第一转速小于该第二转速。
附图说明
6.图1为本发明实施例中可动态控制最小工作周期的半桥式升压电路的示意图。
7.图2示出了本发明实施例半桥式升压电路中相关控制电路运作的信号图。
8.图3示出了本发明实施例半桥式升压电路所驱动的马达其运作特性图。
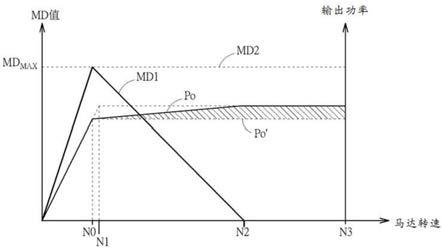
9.图4示出了本发明实施例半桥式升压电路的动态控制最小工作周期运作的示意图。
10.附图标注
11.10:功率装置
12.20:驱动输出电路
13.30:控制电路
14.100:半桥式升压电路
15.hsw:上臂开关
16.lsw:下臂开关
17.sw1
‑
sw4:开关
18.r1、r2:电阻
19.c
gsh
、c
gsl
、c1、c2:电容
20.c
ph
、c
pl
:寄生电容
21.d
bt
:启动二极管
22.n
out
:输出端
23.gnd:接地电压
24.v
dc
:直流电压
25.v
bus
:总线电压
26.v
out
:输出电压
27.v
sw
:切换信号
28.md1、md2:最小工作周期曲线
29.po、po’:马达输出功率曲线
30.tr:马达力矩曲线
具体实施方式
31.图1为本发明实施例中可动态控制最小工作周期(minimum duty)的半桥式升压电路100的示意图。半桥式升压电路100中包括一功率装置10、一驱动输出电路20,以及一控制电路30,可于一输出端n
out
提供一输出电压v
out
以驱动一负载(未示出于图1)。
32.功率装置10包括一上臂开关hsw、一下臂开关lsw、电阻r1和r2,以及电容c
gsh
和c
gsl
。上臂开关hsw的第一端耦接至一总线电压v
bus
,第二端耦接至输出端n
out
,而控制端通过电阻r1耦接至驱动输出电路20以接收控制信号vgh。下臂开关lsw的第一端耦接至输出端n
out
,第二端耦接至接地电压gnd,而控制端通过电阻r2耦接至驱动输出电路20以接收控制信号vgl。c
ph
代表上臂开关hsw的控制端和第二端之间的寄生电容,而c
pl
代表下臂开关lsw的控制端和第二端之间的寄生电容。电容c
gsh
并联于上臂开关hsw的寄生电容c
ph
,而电容c
gsl
并联于下臂开关lsw的寄生电容c
pl
,分别用来防止上臂开关hsw和下臂开关lsw的误动作与调整开关速度。
33.驱动输出电路20包括开关sw1
‑
sw4、电容c1
‑
c2,以及一启动二极管d
bt
。启动二极管d
bt
的阳极耦接至一直流电压v
dc
,而阴极通过电容c1耦接至输出端n
out
。开关sw1的第一端耦接至启动二极管d
bt
的阴极,第二端耦接至功率装置10中的电阻r1,而控制端耦接至控制电路30。开关sw2的第一端耦接至开关sw1的第二端,第二端耦接至输出端n
out
,而控制端耦接至控制电路30。开关sw3的第一端耦接至直流电压v
dc
,第二端耦接至功率装置10中的电阻r2,而控制端耦接至控制电路30。开关sw4的第一端耦接至开关sw3的第二端,第二端耦接至接地电压gnd,而控制端耦接至控制电路30。电容c1为启动电容,其第一端通过启动二极管d
bt
耦接至直流电压v
dc
,而第二端耦接至输出端n
out
。电容c2的第一端耦接至直流电压v
dc
,而第二端耦接至接地电压gnd。
34.控制电路30可依据输出端n
out
的状态来控制开关sw1
‑
sw4以提供控制信号vgh和vgl,进而选择性地导通或断开上臂开关hsw和下臂开关lsw,使得半桥式升压电路100能交替地在充电周期在放电周期内运作。
35.在半桥式升压电路100的每一充电周期内,控制电路30会控制驱动输出电路20的开关sw1
‑
sw4以输出具失能电位的控制信号vgh和具使能电位的控制信号vgl,进而断开上臂开关hsw并导通下臂开关lsw。在这种情况下,输出端n
out
会通过导通的开关sw2被耦接至接地电压gnd,而直流电压v
dc
会通过正向偏压的启动二极管d
bt
来对电容c1充电。换句话说,每一充电周期内电容c1所能储存的能量取决于下臂开关lsw的导通时间。
36.在半桥式升压电路100的每一放电周期内,控制电路30会控制驱动输出电路20的开关sw1
‑
sw4以输出具使能电位的控制信号vgh和具失能电位的控制信号vgl,进而导通上臂开关hsw并断开下臂开关lsw。在这种情况下,输出端n
out
会通过导通的上臂开关hsw被耦接至总线电压v
bus
,同时启动二极管d
bt
会因反向偏压而断开。此时,电容c1在充电周期内所储存的能量可对上臂开关hsw的寄生电容c
ph
充电以将上臂开关hsw维持在导通状态,而总线电压v
bus
可通过导通的上臂开关hsw传送到输出端n
out
以提供输出电压v
out
。换句话说,输出电压v
out
的值取决于每一放电周期内上臂开关hsw的导通时间。
37.马达运作所需的电压通常为正弦波,因此在马达驱动的应用中,本发明半桥式升压电路100会提供不同频率和峰值的正弦波输出电压v
out
,让马达内部产生磁场吸引磁铁,进而控制马达速度。如相关领域的技术人员皆知,马达实际转动方向会包括正转与反转,针
对不同应用(例如直流马达、交流马达及步进马达等)可通过相对应方式(例如改变输入电压极性、电压线序或信号命令等)来改变马达方向。为了简化说明,下列仅以单一马达转向来作说明,本发明也可以相同概念应用在另一马达转向。
38.图2示出了本发明半桥式升压电路中相关控制电路30运作的信号图。控制电路30会依据输出电压v
out
和切换信号v
sw
的频率来控制上臂开关hsw和下臂开关lsw的开启时间和断开时间。切换信号v
sw
为具固定频率和峰值的脉冲信号,而输出电压v
out
的频率和峰值相关于半桥式升压电路100的输出功率(在马达驱动的应用中相关于马达转速)。为了确保输出电压v
out
的波形完整性,切换信号v
sw
的频率通常大于输出电压v
out
的频率至少5倍。为了说明目的,图2所示的输出电压v
out
其频率逐渐增加,而输出电压v
out
和切换信号v
sw
具有相同峰值。
39.当切换信号v
sw
的电平大于输出电压v
out
的电平时,控制电路30会控制驱动输出电路20以断开上臂开关hsw并导通下臂开关lsw;当切换信号v
sw
的电平小于输出电压v
out
的电平时,控制电路30会控制驱动输出电路20以导通上臂开关hsw并断开下臂开关lsw。如图2所示,输出电压v
out
的峰值越大,上臂开关hsw的导通时间越长。反之输出电压v
out
的峰值越低,下臂开关lsw的导通时间越长。另一方面,输出电压v
out
的频率越低,上臂开关hsw的导通时间越长,且开关切换次数越多。
40.为了确保在放电周期时电容c1内存有足够的电荷以将上臂开关hsw维持在导通状态,本发明控制电路30会依据一动态最小工作周期曲线来限制在充电周期时下臂开关lsw的最少导通时间,也就是确保电容c1在充电周期能储存足够能量。更详细地说,若控制信号vgl具使能电位的时间不小于动态最小工作周期曲线的导通时间,则可提供最大化的功率输出。
41.图3示出了本发明半桥式升压电路100所驱动的马达其运作特性图。横轴为马达转速、左方纵轴为力矩(torque)、右方纵轴为输出功率,tr代表马达的力矩随转速变化的曲线,po代表马达的输出功率随转速变化的曲线,其中输出功率po的值约略等于马达转速和力矩的乘积。在转折速度n1之前的区域称为定扭力区(constant torque),而在转折速度n1之后的区域称为定功率区(constant power)。当马达转速在定扭力区时,力矩tr会维持在一固定值的最大扭力tr
max
。当马达转速进入定功率区后(也就是马达的速度到达转折速度n1后),力矩tr的值会随着马达转速增加而减少,而输出功率po的值会维持在一固定值的最大输出功率p
max
。转折速度n1的值相关于总线电压v
bus
,总线电压v
bus
越大,转折速度n1越大。
42.图4示出了本发明半桥式升压电路100的动态控制最小工作周期运作的示意图。横轴为马达转速,左方纵轴为md值、右方纵轴为输出功率,md1代表本发明半桥式升压电路100所采用的动态最小工作周期曲线的其中一个实施例,md2代表现有技术所采用的固定最小工作周期曲线,po代表以本发明半桥式升压电路100马达来驱动的马达其输出功率随转速变化的曲线,po’代表以现有技术驱动的马达其输出功率随转速变化的曲线。如图3和图4所示,当本发明半桥式升压电路100应用在马达驱动时,在马达不同运作阶段需要的md值不同,因此本发明半桥式升压电路100中的控制电路30会采用动态最小工作周期曲线md1,其中动态最小工作周期曲线md1的最大值为md
max
。
43.当马达转速小于转折速度n1时,因输出功率尚未到达定功率区的限制,相对应输出电压v
out
的峰值会小于切换信号v
sw
的峰值,因此下臂开关lsw的导通时间较长,电容c1会
有足够时间来充电,此时最小工作周期曲线md1的值可为小于最大值md
max
的任意值。当马达转速介于0和n0之间时,最小工作周期曲线md1对马达输出功率的限制尚未出现效果,此时马达的输出功率po会随着其转速而增加。当马达转速接近转折速度n1而达到n0时,最小工作周期曲线md1的值已足以限制马达的输出功率po,此时马达的输出功率po会提前达到定功率区的限制,其中n0和n1之间的差距由最小工作周期曲线md1的设定值来决定。在图4所示的实施例中,当马达转速小于转折速度n1时,最小工作周期曲线md1的值随着马达转速增加而呈线性增加。在其它实施例中,当马达转速小于转折速度n1时,最小工作周期曲线md1的值可随着马达转速增加而以多项式、指数、步进方式或其它比例而增加。
44.当马达转速等于转折速度n1时,其输出功率会到达定功率区的限制,相对应输出电压v
out
的峰值约等于切换信号v
sw
的峰值,因此下臂开关lsw的导通时间会变短。为了避免在较短充电时间下电容c1无法充以足够的电荷来在下个周期导通上臂开关hsw,此时最小工作周期曲线md1会设为最大值md
max
。由于转折速度n1的值相关于总线电压v
bus
的值,一般设计时会在以最低总线电压v
bus
来提供最高输出功率的最严苛条件来决定转折速度n1,再采用最大值md
max
以确保下臂开关lsw有足够开启时间,进而使电容c1有足够充电时间。
45.如前所述,输出电压v
out
和切换信号v
sw
的电平和频率取决于马达转速,当马达转速介于n1和n2之间使得输出电压v
out
和切换信号v
sw
具相同峰值时,当马达转速越高,输出电压v
out
的频率越大,而下臂开关lsw所需切换的次数越小,此时最小工作周期曲线md1的值可设成随着马达转速增加而降低。在图4所示的实施例中,当马达转速介于n1和n2之间时,最小工作周期曲线md1的值随着马达转速增加而呈线性减少。在其它实施例中,当马达转速介于n1和n2之间时,最小工作周期曲线md1的值可随着马达转速增加而以多项式、指数、步进方式或其它比例而减少。
46.当马达转速介于0和n1和介于n1和n2之间时,最小工作周期曲线md1的上升斜率和下降斜率可依据总线电压v
bus
的值、电容c1的值、上/下臂开关的特性、驱动输出电路20的漏电流,及/或pwm切换方式来决定。总线电压v
bus
的值正比于转折速度n1,本发明可依据不同应用下总线电压v
bus
的值来决定最小工作周期曲线md1曲线。电容c1内可储存的最高容量相关于其摆放位置、环境温度和运作空间,本发明可依据电容c1的储存容量来决定最小工作周期曲线md1曲线。上/下臂开关在运作时会周期性地对其寄生电容进行充电与放电,本发明可依据不同应用下开关种类与并联电容数量所造成的寄生电容来决定最小工作周期曲线md1曲线。由于驱动输出电路20的漏电流会消耗电容c1的内存能量,本发明可依据驱动输出电路20的漏电流来决定最小工作周期曲线md1曲线。在pwm架构下,开关切换次数越高造成的切换损失越大,而不同调变会在峰值产生不同的耗能需求,最直接差异为切换次数,因此本发明可依据pwm切换方式来决定最小工作周期曲线md1曲线。
47.当马达转速到达n2时,下臂开关lsw所需切换的次数已经少到能让电容c1所储存的电荷足够满足上臂驱动的需求,此时最小工作周期曲线md1曲线的值会设至0。
48.如图4所示,现有技术采用固定值的最小工作周期曲线md2,在驱动马达时会大幅限制其最大输出功率(如曲线po’所示)。相较之下,本发明采用动态最小工作周期曲线md1,其值可依据马达的不同运作阶段来设定,因此可提高马达的最大输出功率(如曲线po所示),其中马达输出功率的提升幅度可由曲线po和po’之间的斜线区域表示。
49.在本发明实施例中,上臂开关hsw、下臂开关lsw,和开关sw1
‑
sw4可为金属氧化物
半导体场效晶体管(metal
‑
oxide
‑
semiconductor field
‑
effect transistor,mosfet)、双极性接面型晶体管(bipolar junction transistor,bjt),或其它具类似功能的组件。对n型晶体管来说,使能电位为高电位,而失能电位为低电位;对p型晶体管来说,使能电位为低电位,而失能电位为高电位。然而,上述开关的种类并不限定本发明的范畴。
50.综上所述,本发明半桥式升压电路会采用动态最小工作周期曲线来限制下臂开关的最少导通时间,以确保启动电容内存有足够的电荷以导通上臂开关。此外,依据负载的不同运作阶段,本发明可动态地设定最小工作周期曲线的值,以有效提高负载的最大输出功率。
51.以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本发明的涵盖范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

