1.本实用新型涉及园林工具领域,具体是一种用于自动行走设备的磁性充电对接结构。
背景技术:
2.割草机器人一般设置有相配合的基站,割草机器人进入基站后可进行充电。目前常用的基站上设置有凸起的充电插头,割草机器人机身上设置有相配合的插口,插头与插口对接后即可进行充电。现有充电结构插头与插口之间接触不紧密,充电插头长度较长且多为锥形结构,长时间暴露在外部具有一定危险性且容易损坏。
技术实现要素:
3.针对上述技术问题,本实用新型公开了一种用于自动行走设备的磁性充电对接结构及充电对接方法,可以保证自行走设备在充电时连接头与连接座稳定连接且不容易断开,同时没有突出于基站外部的插头,安全性更强。
4.为了实现上述技术目的,本实用新型采用如下技术方案:一种用于自动行走设备的磁性充电对接结构包括:
5.基站,用于自行走设备的停靠和充电,基站上设置有连接座;
6.自行走设备,包括连接头用于与基站上连接座对接进行充电;
7.所述连接头与连接座至少部分使用导电材料制成;
8.所述连接头通过弹性件连接于自行走设备侧部或者端部上的腔室内,所述连接头上设置有铁磁物质,所述基站上设置有第一电磁铁,所述第一电磁铁通电后,吸附连接头与连接座接触连接,并完成自行走设备内储电设备与充电电源之间的电性连接。
9.作为本方案的一种改进,所述基站内设置有控制电源用于控制第一电磁铁的通电和断电。
10.作为本方案的一种改进,所述基站上设置有限位座,所述限位座为突出于基站表面的凸起,自行走设备行走至与限位座接触时,限位座限制自行走设备继续移动。
11.作为本方案的一种改进,所述限位座上设置有感应元件,在自行走设备上设置触发器,当触发器位于感应元件的触发范围内时,感应元件发出信号,指示自行走设备到达充电位置,所述感应元件与基站上控制单元电性连接,所述基站上的控制单元根据感应元件发出的信号控制第一电磁铁的通电和断电。
12.作为本方案的一种改进,所述自行走设备上设置有第二电磁铁,所述第一电磁铁和第二电磁铁同一时刻下只有一个通电,第二电磁铁通电时,连接头在第二电磁铁吸附下固定于自行走设备上的腔室内。
13.作为本方案的一种改进,所述基站内和自行走设备内均设置有控制单元分别对第一电磁铁和第二电磁铁进行通电和断电的控制。
14.作为本方案的一种改进,基站和自行走设备内的控制单元均包含无线通信模块,
可以进行数据交换。
15.作为本方案的一种改进,所述基站和自行走设备上均设置有感应元件和触发器,所述自行走设备行走至基站上充电位置时,基站和自行走设备上的感应元件均被触发器触发。
16.作为本方案的一种改进,所述腔室开口处设置有可开启的活动门。
17.一种基于上述用于自动行走设备的磁性充电对接结构实施的充电对接方法,其特征在于,包括如下步骤:
18.1、当自行走设备不处于充电位置时,第二电磁铁通电,第一电磁铁断电,连接头在第二电磁铁的吸附下固定于自行走设备上的腔室内;
19.2、当自行走设备处于充电位置时,即自行走设备上触发器处于限位座中感应元件触发范围内时,第二电磁铁断电,同时第一电磁铁通电,连接头被第一电磁铁吸附同时与连接座接触对接;
20.3、当自行走设备电量充满时,第一电磁铁断电,连接头在弹性件作用下收回至自行走设备上的腔室内
21.作为本方案的一种改进,所述自行走设备腔室开口处设置有活动门,活动门在步骤1时关闭;在步骤2中,当自行走设备处于充电位置时,活动门开启;在步骤3结束时活动门关闭。
22.有益效果:
23.本实用新型在公开了一种利用磁性元件实现对接功能的充电对接结构,利用此结构可以保证自行走设备上连接头与基站上连接座之间稳定连接,避免传统的对接方式中,插头与插座之间容易有间隙,长时间使用容易接触不良的缺陷。
24.同时,基于所公开的充电对接结构,还公开一种充电对接方法,利用感应元件和触发器判断自行走设备是否处于充电站内充电位置,通过对第一电磁铁和第二电磁铁的通断电控制,实现连接座与连接头的对接和松脱,更好的完成自行走设备的充电对接过程。
25.本实用新型的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本实用新型而了解。
附图说明
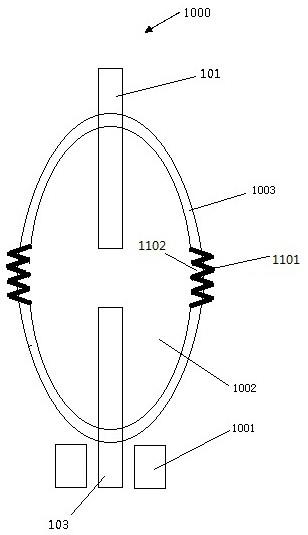
26.图1为本实用新型结构示意图;
27.a为磁性对接头;
28.图2为a处放大图;
29.图3为连接头与连接座连接状态下结构示意图;
30.b为连接状态下的连接头与连接座;
31.图4为b处放大图;
32.图5为活动门关闭状态结构示意图;
33.图6为活动门开启状态结构示意图;
34.其中,1、车体;2、基站;3、充电座;4、控制电路板;5、电池;6、充电电路板;7、连接座;8、第一电磁铁;9、连接线;10、限位座;11、触发器;12、连接头;13、铁磁块;14、弹性件;15、第二电磁铁;16、活动门;17、电机;18、轨道。
具体实施方式
35.下面通过具体实施例对本实用新型所公开的技术方案进行说明,以下实施例中自行走设备具体为割草机器人。
36.实施例1
37.如图1所示是本实用新型所述方案的一种具体实施方式,本实施方式中,割草机器人包括车体1,车体1上设置有行走单元和切割单元,行走单元用于带动车体1移动,切割单元用于切割草体,车体1内部设置有控制电路板4,车体1上电气元件通过连接线9与控制电路板4连接,控制电路板4还连接有电池5。车体1侧部或者端部设置有磁性对接头,用于与基站2上的连接座7连接进行充电。
38.由图1可知,地面上设置有基站2,基站2上设置有充电座3,充电座3内设置有充电电路板6,充电座3侧部设置有连接座7用于与自行走设备上的连接头12进行连接,连接座7与充电电路板6通过连接线9电连接,充电电路板6可以实现对充电电路的控制,实现电路通断等功能。连接座7周围还设置有第一电磁铁8,所述第一电磁铁8与充电电路板6电性连接,通过充电电路板6可控制第一电磁铁8的通断电。基站2上还设置有限位座10,所述限位座10用于限定自行走设备位置。
39.如图1所示为限位座10的一种实施方式,所述限位座10为设置在基站2上的凸起,当自行走设备行走至基站2上时,轮体触碰到限位座10时,限位座10可以限制自行走设备继续移动。同时限位座10还可以起到位置指示的作用,自行走设备在到达限位座10限定位置下,可以更好完成充电对接过程。
40.如图2所示为车体1上磁性对接头的具体结构,由图可知,车体1上设置有凹槽,凹槽内设置有连接头12,所述连接头12通过弹性件14连接于凹槽内,连接头12在弹性件14作用下具有向车体1内侧运行的趋势。连接头12与控制电路板4电性连接。车体1上凹槽内还设置有第二电磁铁15,连接头12一周对应第一电磁铁8和第二电磁铁15位置设置有铁磁块13,在第一电磁铁8和第二电磁铁15通电时,铁磁块13连带连接头12可以被第一电磁铁8和第二电磁铁15吸附。如图3和4所示,当连接头12被第一电磁铁8吸附时,可以实现连接头12与连接座7的对接,自行走设备可以进行充电。
41.为了更好的控制连接头12与连接座7的对接,限位座10上可以设置相应的元件,用于判定自行走设备是否到达指定位置。具体的方式可以是在限位座10上设置感应元件,如图2所示,在车体1上设置触发器11,当触发器11位于感应元件的触发范围内时,感应元件发出信号,指示车体1到达充电位置。车体1控制电路板4与基站2充电电路板6可以通过设置无线通信连接的方式,实现数据交互,使车体1控制电路板4与基站2充电电路板6可以同时获取车体1是否到达基站2位置的信息。在基站2和车体1没有建立无线通信连接的情况下,可以在限位座10和车体1上互相设置感应元件和触发器11,车体1控制电路板4和基站2充电电路板6可以分别获取车体1是否到达基站2位置的信息。
42.感应元件和触发器11可以是霍尔传感器和磁铁、红外发射器和接收器、无线射频识别(rfid)等,其他可以实现同样效果的传感器和触发器11,均包括在本技术所公开的技术方方案内。
43.第一电磁铁8和第二电磁铁15的具体控制方法如下:
44.1、当车体1不处于充电位置时,第二电磁铁15通电,第一电磁铁8断电,连接头12在
第二电磁铁15的吸附下固定于车体1上凹槽内;
45.2、当车体1处于充电位置时,即车体1上触发器11处于限位座10中感应元件触发范围内时,第二电磁铁15断电,同时第一电磁铁8通电,连接头12被第一电磁铁8吸附同时与连接座7接触对接;
46.3、当自行走电量充满时,第一电磁铁8断电,连接头12在弹性件14作用下收回至车体1凹槽内。
47.连接座7和连接头12可以是导电材料制成,连接头12可以是具有一定弹性的片体结构,便于更好的与连接座7接触导电。为了保证连接座7与连接头12可以准确连接,在连接座7和连接头12上可以对应设置有对准机构,例如对应设置的定位孔和定位凸起,定位孔和定位凸起可以是锥形结构,具有一定的自对准和导向功能。
48.实施例2
49.本实施例在实施例1的基础上,在车体1上增加了可开启和关闭的活动门16,如图2和5所示,在车体1上凹槽开口处设置有活动门16,所述活动门16通过轨道18活动连接于车体1侧部,活动门16通过致动器带动实现开启和关闭。活动门16具体的开启和关闭方式可以是滑动或者转动。当采用滑动的方式时,活动门16可以通过齿条齿轮啮合、皮带传动等方式与致动器连接,致动器可以是电机17;当采用转动方式时,活动门16与车体1通过铰接方式连接,活动门16转轴轴线处传动连接致动器,致动器可以是电机17,电机17输出端转动机壳带动活动门16旋转。除了上述方式外,其他机械领域中公知的可开启盖体、可开启门等方式均可以在此进行应用。
50.活动门16的设置可以对连接头12起到保护作用,当采用活动门16方案时,具体的充电对接控制步骤如下:
51.1、当车体1不处于充电位置时,如图5所示,活动门16关闭,此时,第二电磁铁15通电,第一电磁铁8断电,连接头12在第二电磁铁15的吸附下固定于车体1上凹槽内;
52.2、当车体1处于充电位置时,即车体1上触发器11处于限位座10中感应元件触发范围内时,如图6所示,活动门16开启,连接头12可以从活动门16打开的区域内至少部分移动至外部,此时,第二电磁铁15断电,同时第一电磁铁8通电,连接头12被第一电磁铁8吸附同时与连接座7接触对接;
53.3、当自行走电量充满时,第一电磁铁8断电,连接头12在弹性件14作用下收回至车体1凹槽内,活动门16再次关闭。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。