1.本发明属于隔离开关技术领域,具体涉及一种城市轨道交通用三工位隔离开关及其使用方法。
背景技术:
2.随着国家对大中城市的发展,轨道交通已成为人流密集型运输设备,近几年更趋于发车早、收车晚,留给检修的时间越来越少,这就对日常检修效率提出了更高要求。现如今的供电线路通常由隔离开关和接地开关组成,两种产品之间只能进行电气互锁,安全级别较低;另一种现有的三工位隔离开关一般为进线位、隔离位及接地位三个位置,整合了隔离开关和接地开关两者的功能,并由一把刀来完成,从而防止主回路带电合地刀,三工位隔离开关的三工位由上到下依次是进线位、隔离位及接地位,但现有的隔离开关在用久之后容易出现三工位隔离开关隔离位漂移或不能很准确的停留在隔离位,造成输配电行业供电不准确,进而造成事故扩大化的技术问题。
技术实现要素:
3.本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种城市轨道交通用三工位隔离开关,其设计新颖合理,通过采用集成式一体化设计来控制牵引变电所与地铁接触网之间连接线路的接通、断电和接地,通过设置电气闭锁机构在隔离刀组件转动至所需工作位置后,所需工作位置对应的行程开关切断电源实现电气闭锁,主轴停止转动,避免隔离刀组件到位后发生漂移,角度位置可靠稳定,使用效果好;通过设置限位机构实现隔离开关的机械互锁,通过设置检测器便于工作人员得知该隔离开关的工作状态,整体安装紧凑,占用空间小,机械互锁性能优越,不仅免去了检修前的验电、挂地线等准备阶段以及工作完成后的整理阶段,节约了时间成本,提高了工作效率,而且提高了操作人员和设备安全,有效防止误操作,便于推广使用。
4.为解决上述技术问题,本发明采用的技术方案是:一种城市轨道交通用三工位隔离开关,其特征在于:进线位,用于选通第一牵引变电所给出线位供电的正常供电线路;
5.接地位,用于选通出线位接地的线路;
6.隔离位,用于选通与第一牵引变电所相邻的第二牵引变电所给出线位供电的跨区供电线路,所述隔离位是指进线位和接地位之间的空腔;
7.隔离刀组件;
8.操作机构,用于带动隔离刀组件转动使所述出线位与进线位或接地位连接导通,或用于带动所述隔离刀组件转动使所述隔离刀组件位于所述隔离位;
9.限位机构,用于限制所述出线位与进线位连接导通时隔离刀组件转动位置的进线位限位器、用于限制所述出线位与接地位连接导通时隔离刀组件转动位置的接地位限位器,以及用于限制所述隔离刀组件处于隔离位时所述隔离刀组件转动位置的隔离位限位器;
10.电气闭锁机构,用于在所述隔离刀组件转动至进线位、接地位或隔离位时操作所述操作机构制动;
11.检测器,用于检测进线位和接地位的导通信号,以及隔离位的隔离信号;
12.架体,用于安装进线位、接地位、隔离位、出线位、操作机构、隔离刀组件、限位机构、电气闭锁机构和检测器;所述架体包括平行布设的前竖向安装板和后竖向安装板,所述进线位、接地位、出线位、隔离刀组件均安装于前竖向安装板和后竖向安装板之间。
13.上述的一种城市轨道交通用三工位隔离开关,其特征在于:所述进线位和所述接地位对称设置在所述出线位的两侧,所述进线位包括两个进线板安装杆和套设在两个进线板安装杆上的进线板,所述进线板与所述隔离刀组件配合的端部设置有进线板接触触头;
14.所述接地位包括两个接地板安装杆和套设在两个接地板安装杆上的接地板,所述接地板与所述隔离刀组件配合的端部设置有接地板接触触头;
15.所述出线位包括两个出线板安装杆和套设在两个出线板安装杆上的出线板,所述出线板与所述隔离刀组件配合的端部设置有多个出线板接触触头。
16.上述的一种城市轨道交通用三工位隔离开关,其特征在于:所述进线板安装杆、接地板安装杆和出线板安装杆的结构相同,所述进线板安装杆、接地板安装杆和出线板安装杆均包括依次连接的前连接螺栓、前绝缘子、支撑杆、后绝缘子、后连接螺栓,所述支撑杆上套设有支撑套,所述前连接螺栓与前竖向安装板连接,所述后连接螺栓与后竖向安装板连接;
17.所述进线板的数量为两个,两个所述进线板中一个进线板位于进线板安装杆的支撑套与进线板安装杆的前绝缘子之间,另一个进线板位于进线板安装杆的支撑套与进线板安装杆的后绝缘子之间;
18.所述接地板的数量为两个,两个所述接地板中一个接地板位于接地板安装杆的支撑套与接地板安装杆的前绝缘子之间,另一个进线板位于接地板安装杆的支撑套与接地板安装杆的后绝缘子之间;
19.所述出线板的数量为两个,两个所述出线板中一个出线板位于出线板安装杆的支撑套与出线板安装杆的前绝缘子之间,另一个出线板位于出线板安装杆的支撑套与出线板安装杆的后绝缘子之间。
20.上述的一种城市轨道交通用三工位隔离开关,其特征在于:所述隔离刀组件包括前隔离刀压板、第一隔离刀板、第二隔离刀板、第三隔离刀板、第四隔离刀板和后隔离刀压板,以及设置在前隔离刀压板和第一隔离刀板之间、第二隔离刀板与第三隔离刀板之间、第四隔离刀板与后隔离刀压板之间的弹簧板,定位连接杆依次穿过前隔离刀压板、前隔离刀压板与第一隔离刀板之间的弹簧板、第一隔离刀板、第二隔离刀板、第二隔离刀板与第三隔离刀板之间的弹簧板、第三隔离刀板、第四隔离刀板、第四隔离刀板与后隔离刀压板之间的弹簧板,以及后隔离刀压板将所述隔离刀组件连接为一体;
21.所述前隔离刀压板和后隔离刀压板的一端与出线板铰接,且所述第一隔离刀板、第二隔离刀板、第三隔离刀板和第四隔离刀板的一端均与出线板相贴合。
22.上述的一种城市轨道交通用三工位隔离开关,其特征在于:所述操作机构包括蜗轮蜗杆减速机和与蜗轮蜗杆减速机的输出轴传动连接的主轴,以及用于带动蜗轮蜗杆减速机的输出轴转动的电动驱动器和手动驱动器,所述主轴上设置有两个铰接耳,两个所述铰
接耳之间铰接有用于带动所述隔离刀组件转动的绝缘拉杆;
23.所述电动驱动器包括电机,所述电机的输出轴与蜗轮蜗杆减速机的蜗杆的一端传动连接;
24.所述手动驱动器包括安装箱、设置在安装箱内且伸出安装箱的输入轴和套设在输入轴上的输入锥齿轮,以及套设在蜗轮蜗杆减速机的蜗杆的另一端且与输入锥齿轮啮合的输出锥齿轮。
25.上述的一种城市轨道交通用三工位隔离开关,其特征在于:所述前竖向安装板的内侧面上设置有限位板,所述进线位限位器和所述接地位限位器对称设置在限位板上且分别位于主轴的两侧,所述主轴上套设有与所述进线位限位器和所述接地位限位器配合的限位块,所述进线位限位器包括设置在限位板上且位于主轴左侧的进线位限位螺栓,所述接地位限位器包括设置在限位板上且位于主轴右侧的接地位限位螺栓。
26.上述的一种城市轨道交通用三工位隔离开关,其特征在于:所述隔离位限位器包括套设在主轴上且与主轴同步转动的限位盘,以及与限位盘配合且用于限制限位盘转动的弹性限位件,所述限位盘的圆周侧面上开设有卡槽;
27.所述弹性限位件包括限位杆和套设在限位杆上的限位套,以及套设在限位杆上且位于限位杆和限位套之间的弹簧,所述限位杆的两端均伸出限位套,所述限位杆的一端与限位盘上的卡槽卡接配合,所述限位杆的另一端通过连接杆与电磁铁的铁芯的一端连接,所述电磁铁的铁芯的另一端连接有手动拉环;
28.所述前竖向安装板的外侧面设置有由于检测限位杆位置的限位行程开关,所述连接杆上套设有与限位行程开关配合的行程开关撞块。
29.上述的一种城市轨道交通用三工位隔离开关,其特征在于:所述电气闭锁机构包括设置在后竖向安装板的外侧面上的行程开关组件,以及套设在主轴上且与所述行程开关组件配合的凸轮组件;
30.所述行程开关组件包括依次设置在后竖向安装板的外侧面上且用于检测所述接地位导通信号的接地位行程开关、用于检测进线位导通信号的进线位行程开关,以及均用于检测所述隔离位隔离信号的第一隔离位行程开关和第二隔离位行程开关;
31.所述凸轮组件包括依次套设在主轴上且与接地位行程开关配合的接地位检测凸轮、与进线位行程开关配合的进线位检测凸轮、与第一隔离位行程开关配合的第一隔离位检测凸轮,以及与第二隔离位行程开关配合的第二隔离位检测凸轮。
32.上述的一种城市轨道交通用三工位隔离开关,其特征在于:所述检测器包括用于检测所述隔离刀组件与进线位连接导通或所述隔离刀组件与接地位连接导通的第一检测器,以及用于检测所述隔离刀隔离位组件位于隔离位的第二检测器;
33.所述第一检测器包括第一检测箱、设置在第一检测箱内的第一绝缘支架、设置在第一绝缘支架内且与第一绝缘支架转动配合的第一旋转轴,均设置在第一绝缘支架上的进线位静触片和接地位静触片,以及套设在第一旋转轴上且用于与所述进线位静触片或所述接地位静触片导通的第一动触片,所述第一旋转轴的两端均伸出第一检测箱,所述第一旋转轴的一端套设有第一连接拐臂,所述第一连接拐臂上铰接有第一连接杆,所述第一连接杆远离第一连接拐臂的端部与两个铰接耳中的一个铰接耳铰接;
34.所述第二检测器包括第二检测箱、设置在第二检测箱内的第二绝缘支架、设置在
第二绝缘支架内且与第二绝缘支架转动配合的第二旋转轴、设置在第二绝缘支架上的隔离位静触片,以及套设在第二旋转轴上且用于与所述隔离位静触片连接导通的第二动触片,所述第二旋转轴的两端均伸出第二检测箱,所述第二旋转轴的一端套设有第二连接拐臂,所述第二连接拐臂上铰接有第二连接杆,所述第二连接杆远离第二连接拐臂的端部与两个铰接耳中的另一个铰接耳铰接。
35.同时,本发明还公开了一种方法步骤简单、设计合理且使用效果好的城市轨道交通用三工位隔离开关的使用方法,其特征在于,该方法包括以下步骤:
36.步骤一、隔离开关工作类型的分类:所述隔离开关工作类型包括第一牵引变电所给出线位供电、出线位接地和第二牵引变电所给出线位供电;
37.当选择第一牵引变电所给出线位供电时,执行步骤二;
38.当选择出线位接地时,执行步骤三;
39.当选择第二牵引变电所给出线位供电时,执行步骤四;
40.步骤二、第一牵引变电所给出线位供电:第一牵引变电所给出线位供电的具体过程如下:
41.步骤201、根据检测器输出的信号判断隔离刀组件处于接地位或隔离位,当所述隔离刀组件处于接地位时,执行步骤202;当所述隔离刀组件处于隔离位时,执行步骤203;
42.步骤202、所述隔离刀组件由接地位转动至进线位的具体过程如下:
43.步骤2021、操作电机的输出轴顺时针转动,电机的输出轴顺时针转动带动蜗轮蜗杆减速机的输出轴顺时针转动,蜗轮蜗杆减速机的输出轴顺时针转动带动主轴顺时针转动,主轴顺时针转动带动铰接耳、限位盘和第二隔离位检测凸轮顺时针同步转动;
44.步骤2022、铰接耳顺时针转动带动绝缘拉杆和第二检测器的第二连接杆顺时针同步转动,在绝缘拉杆顺时针转动的过程中,隔离刀组件的一端始终与出线板连接导通,所述隔离刀组件的另一端随着绝缘拉杆的转动顺时针转动,直至限位杆的一端卡装至限位盘的卡槽内,限位盘停止转动,此时,所述隔离刀组件与出线板之间的夹角为180
°
,所述隔离刀组件的另一端位于隔离位,实现第二牵引变电所给出线位供电;其中,在限位杆的一端卡装至卡槽内的同时,第二隔离位检测凸轮与第二隔离位行程开关碰撞使第二隔离位行程开关接通,第二隔离位行程开关接通使电机断电,进而使主轴停止转动;
45.步骤2023、在第二连接杆顺时针转动的过程中,第二连接杆顺时针转动带动第二连接拐臂顺时针转动,第二连接拐臂顺时针转动带动第二旋转轴顺时针转动,直至主轴停止转动,主轴停止转动时,第二旋转轴上的第二动触片与第二绝缘支架上的隔离位静触片连接导通,第二检测器检测到所述隔离刀组件位于隔离位;
46.步骤2024、操作电磁铁得电,电磁铁得电使电磁铁的铁芯向左移动,所述电磁铁的铁芯向左移动带动连接杆和限位杆同步向左移动,使限位杆的一端脱离限位盘上的卡槽,连接杆向左移动带动行程开关撞块向左移动,行程开关撞块向左移动与限位行程开关接触,使限位行程开关接通,限位行程开关接通2s~3s后,使电磁铁失电;其中,电磁铁的铁芯向左移动是指电磁铁的铁芯向远离限位行程开关的方向移动;
47.步骤2025、在限位行程开关接通2s~3s内,再次操作电机的输出轴顺时针转动,电机的输出轴顺时针转动带动蜗轮蜗杆减速机的输出轴顺时针转动,蜗轮蜗杆减速机的输出轴顺时针转动带动主轴顺时针转动,主轴顺时针转动带动铰接耳、限位块和进线位检测凸
轮顺时针同步转动;
48.步骤2026、铰接耳顺时针转动带动绝缘拉杆和第一检测器的第一连接杆顺时针同步转动,在绝缘拉杆顺时针转动的过程中,隔离刀组件的一端始终与出线板连接导通,所述隔离刀组件的另一端随着绝缘拉杆的转动顺时针转动,直至限位块与设置在限位板上的进线位限位螺栓抵接,主轴停止转动,此时,所述隔离刀组件的另一端与进线板连接导通,实现第一牵引变电所给出线位供电;其中,在限位块与设置在限位板上的进线位限位螺栓抵接的同时,进线位检测凸轮与进线位行程开关碰撞使进线位行程开关接通,进线位行程开关接通使电机断电,进而使主轴停止转动;
49.步骤2027、在第一连接杆顺时针转动的过程中,第一连接杆顺时针转动带动第一连接拐臂顺时针转动,第一连接拐臂顺时针转动带动第一旋转轴顺时针转动,直至主轴停止转动,主轴停止转动时,第一旋转轴上的第一动触片与第一绝缘支架上的进线位静触片连接导通,第一检测器检测到所述隔离刀组件的另一端与进线板连接导通,第一牵引变电所给出线位供电;
50.步骤203、重复步骤2024至步骤2027,使所述隔离刀组件由隔离位转动至进线位,实现第一牵引变电所给出线位供电;
51.步骤三、出线位接地:出线位接地的具体过程如下:
52.步骤301、根据检测器输出的信号判断隔离刀组件处于进线位或隔离位,当所述隔离刀组件处于进线位时,执行步骤302;当所述隔离刀组件处于隔离位时,执行步骤303;
53.步骤302、所述隔离刀组件由进线位转动至接地位的具体过程如下:
54.步骤3021、操作电机的输出轴逆时针转动,电机的输出轴逆时针转动带动蜗轮蜗杆减速机的输出轴逆时针转动,蜗轮蜗杆减速机的输出轴逆时针转动带动主轴逆时针转动,主轴逆时针转动带动铰接耳、限位盘和第一隔离位检测凸轮逆时针同步转动;
55.步骤3022、铰接耳逆时针转动带动绝缘拉杆和第二检测器的第二连接杆逆时针同步转动,在绝缘拉杆逆时针转动的过程中,隔离刀组件的一端始终与出线板连接导通,所述隔离刀组件的另一端随着绝缘拉杆的转动逆时针转动,直至限位杆的一端卡装至限位盘的卡槽内,限位盘停止转动,此时,所述隔离刀组件与出线板之间的夹角为180
°
,所述隔离刀组件的另一端位于隔离位,实现第二牵引变电所给出线位供电;其中,在限位杆的一端卡装至卡槽内的同时,第一隔离位检测凸轮与第一隔离位行程开关碰撞使第一隔离位行程开关接通,第一隔离位行程开关接通使电机断电,进而使主轴停止转动;
56.步骤3023、在第二连接杆逆时针转动的过程中,第二连接杆逆时针转动带动第二连接拐臂逆时针转动,第二连接拐臂逆时针转动带动第二旋转轴逆时针转动,直至主轴停止转动,主轴停止转动时,第二旋转轴上的第二动触片与第二绝缘支架上的隔离位静触片连接导通,第二检测器检测到所述隔离刀组件位于隔离位;
57.步骤3024、操作电磁铁得电,电磁铁得电使电磁铁的铁芯向左移动,所述电磁铁的铁芯向左移动带动连接杆和限位杆同步向左移动,使限位杆的一端脱离限位盘上的卡槽,连接杆向左移动带动行程开关撞块向左移动,行程开关撞块向左移动与限位行程开关接触,使限位行程开关接通,限位行程开关接通2s~3s后,使电磁铁失电;
58.步骤3025、在限位行程开关接通2s~3s内,再次操作电机的输出轴逆时针转动,电机的输出轴逆时针转动带动蜗轮蜗杆减速机的输出轴逆时针转动,蜗轮蜗杆减速机的输出
轴逆时针转动带动主轴逆时针转动,主轴逆时针转动带动铰接耳、限位块和进线位检测凸轮逆时针同步转动;
59.步骤3026、铰接耳逆时针转动带动绝缘拉杆和第一检测器的第一连接杆逆时针同步转动,在绝缘拉杆逆时针转动的过程中,隔离刀组件的一端始终与出线板连接导通,所述隔离刀组件的另一端随着绝缘拉杆的转动逆时针转动,直至限位块与设置在限位板上的接地位限位螺栓抵接,主轴停止转动,此时,所述隔离刀组件的另一端与接地板连接导通,实现出线位接地;其中,在限位块与设置在限位板上的接地位限位螺栓抵接的同时,接地位检测凸轮与接地位行程开关碰撞使接地位行程开关接通,接地位行程开关接通使电机断电,进而使主轴停止转动;
60.步骤3027、在第一连接杆逆时针转动的过程中,第一连接杆逆时针转动带动第一连接拐臂逆时针转动,第一连接拐臂逆时针转动带动第一旋转轴逆时针转动,直至主轴停止转动,主轴停止转动时,第一旋转轴上的第一动触片与第一绝缘支架上的接地位静触片连接导通,第一检测器检测到所述隔离刀组件的另一端与接地板连接导通,出线位接地;
61.步骤303、重复步骤3024至步骤3027,使所述隔离刀组件由隔离位转动至接地位,实现出线位接地;
62.步骤四、第二牵引变电所给出线位供电:第二牵引变电所给出线位供电的具体过程如下:
63.步骤401、根据检测器输出的信号判断隔离刀组件处于进线位或接地位,当所述隔离刀组件处于进线位时,执行步骤402;当所述隔离刀组件处于接地位时,执行步骤403;
64.步骤402、重复步骤3021至步骤3023,使所述隔离刀组件由进线位转动至隔离位,实现第二牵引变电所给出线位供电;
65.步骤403、重复步骤2021至步骤2023,使所述隔离刀组件由接地位转动至隔离位,实现第二牵引变电所给出线位供电。
66.本发明与现有技术相比具有以下优点:
67.1、本发明采用的三工位隔离开关,设计合理,通过采用集成式一体化设计来控制牵引变电所与地铁接触网之间连接线路的接通、断电和接地,通过设置限位机构实现隔离开关的机械互锁,通过设置检测器便于工作人员得知该隔离开关的工作状态,整体安装紧凑,占用空间小,机械互锁性能优越,不仅免去了检修前的验电、挂地线等准备阶段以及工作完成后的整理阶段,节约了时间成本,提高了工作效率,而且提高了操作人员和设备安全,有效防止误操作。
68.2、本发明采用三工位工作模式,设置有隔离位、进线位和接地位,一目了然,断点可见,实用性强,便于推广使用。
69.3、本发明通过设置操作机构带动隔离刀组件转动,操作机构包括用于驱动隔离刀组件转动的电动驱动器和手动驱动器,在调试或电气故障时,可以通过手动驱动器操作隔离刀组件动作,且电动驱动器正常使用时,当手动驱动器操作隔离刀组件动作时,电动驱动器断电,防止电动驱动器的电机误动作造成人员伤害,安全性好。
70.4、本发明通过设置电气闭锁机构在隔离刀组件转动至所需工作位置后,所需工作位置对应的行程开关切断电源实现电气闭锁,主轴停止转动,避免隔离刀组件到位后发生漂移,角度位置可靠稳定,使用效果好。
71.5、本发明通过设置进线位限位器在出线位与进线位连接导通时对隔离刀组件的转动位置进行限制,通过设置接地位限位器在出线位与接地位连接导通时对隔离刀组件的转动位置进行限制,避免隔离刀组件转动不到位,保证该隔离开关的使用可靠性。
72.6、本发明通过设置隔离位限位器在隔离刀组件转动至隔离位后,隔离位限位器的限位杆直接卡装在限位盘的卡槽内,使主轴停止转动,能够有效避免隔离刀在隔离位发生漂移,可靠稳定,使用效果好。
73.综上所述,本发明设计新颖合理,通过采用集成式一体化设计来控制牵引变电所与地铁接触网之间连接线路的接通、断电和接地,通过设置电气闭锁机构在隔离刀组件转动至所需工作位置后,所需工作位置对应的行程开关切断电源实现电气闭锁,主轴停止转动,避免隔离刀组件到位后发生漂移,角度位置可靠稳定,使用效果好;通过设置限位机构实现隔离开关的机械互锁,通过设置检测器便于工作人员得知该隔离开关的工作状态,整体安装紧凑,占用空间小,机械互锁性能优越,不仅免去了检修前的验电、挂地线等准备阶段以及工作完成后的整理阶段,节约了时间成本,提高了工作效率,而且提高了操作人员和设备安全,有效防止误操作,便于推广使用。
74.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
75.图1为本发明隔离开关的结构示意图。
76.图2为图1的俯视图。
77.图3为本发明进线位的结构示意图。
78.图4为本发明隔离刀组件的结构示意图。
79.图5为本发明操作机构的结构示意图。
80.图6为本发明前竖向安装板、主轴、限位板、限位块、进线位限位螺栓和接地位限位螺栓的连接结构示意图。
81.图7为本发明主轴和隔离位限位器的连接结构示意图。
82.图8为图1中的a处放大图。
83.图9为本发明第一检测器去掉第一检测箱后的结构示意图。
84.图10为图9的俯视图。
85.图11为图10的b
‑
b剖视图。
86.图12为本发明第二检测器去掉第二检测箱后的结构示意图。
87.图13为图12的俯视图。
88.图14为图13的c
‑
c剖视图。
89.附图标记说明:
90.1—前竖向安装板;2—后竖向安装板;3—进线板安装杆;
91.4—进线板;5—进线板接触触头;6—接地板安装杆;
92.7—接地板;8—接地板接触触头;9—出线板安装杆;
93.10—出线板;11—出线板接触触头;12—前连接螺栓;
94.13—前绝缘子;14—后绝缘子;15—后连接螺栓;
95.16—支撑套;17—前隔离刀压板;18—第一隔离刀板;
96.19—第二隔离刀板;20—第三隔离刀板;21—第四隔离刀板;
97.22—后隔离刀压板;23—弹簧板;24—定位连接杆;
98.25—蜗轮蜗杆减速机;26—主轴;27—铰接耳;
99.28—绝缘拉杆;29—电机;30—安装箱;
100.31—输入轴;32—输入锥齿轮;33—输出锥齿轮;
101.34—限位板;35—限位块;36—进线位限位螺栓;
102.37—接地位限位螺栓;38—限位盘;39—限位杆;
103.40—限位套;41—弹簧;42—连接杆;
104.43—电磁铁;44—手动拉环;45—限位行程开关;
105.46—行程开关撞块;47—卡槽;48—接地位行程开关;
106.49—进线位行程开关;50—第一隔离位行程开关;
107.51—第二隔离位行程开关;52—第二隔离位行程开关;
108.53—进线位检测凸轮;54—第一隔离位检测凸轮;
109.55—第二隔离位检测凸轮;56—第一检测箱;
110.57—第一绝缘支架;58—第一旋转轴;
111.59
‑
1—第一进线位静触片;59
‑
2—第二进线位静触片;
112.60
‑
1—第一接地位静触片;60
‑
2—第二接地位静触片;
113.61—第一动触片;62—第一连接拐臂;63—铁芯;
114.64—第二检测箱;65—第二绝缘支架;66—第二旋转轴;
115.67—第二动触片;68—第二连接拐臂;69—第二连接杆;
116.70
‑
1—第一隔离位静触片;70
‑
2—第二隔离位静触片;
117.71—绝缘板;72—安全开关;73—保护盖;
118.74—操作机构连接板;75—限位盘固定件;76—限位件安装板;
119.77—检测器连接板。
具体实施方式
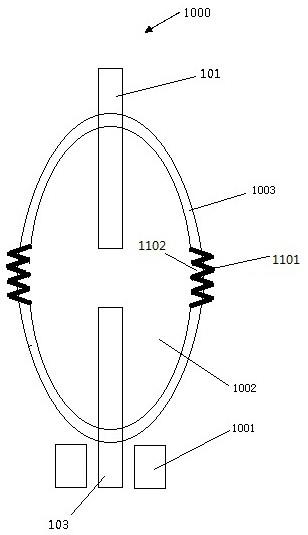
120.如图1所示,本发明所述的一种城市轨道交通用三工位隔离开关,包括
121.进线位,用于选通第一牵引变电所给出线位供电的正常供电线路;
122.接地位,用于选通出线位接地的线路;
123.隔离位,用于选通与第一牵引变电所相邻的第二牵引变电所给出线位供电的跨区供电线路,所述隔离位是指进线位和接地位之间的空腔;
124.隔离刀组件;
125.操作机构,用于带动隔离刀组件转动使所述出线位与进线位或接地位连接导通,或用于带动所述隔离刀组件转动使所述隔离刀组件位于所述隔离位;
126.限位机构,用于限制所述出线位与进线位连接导通时隔离刀组件转动位置的进线位限位器、用于限制所述出线位与接地位连接导通时隔离刀组件转动位置的接地位限位器,以及用于限制所述隔离刀组件处于隔离位时所述隔离刀组件转动位置的隔离位限位器;
127.电气闭锁机构,用于在所述隔离刀组件转动至进线位、接地位或隔离位时操作所
述操作机构制动;
128.检测器,用于检测进线位和接地位的导通信号,以及隔离位的隔离信号;
129.架体,用于安装进线位、接地位、隔离位、出线位、操作机构、隔离刀组件、限位机构、电气闭锁机构和检测器;所述架体包括平行布设的前竖向安装板1和后竖向安装板2,所述进线位、接地位、出线位、隔离刀组件均安装于前竖向安装板1和后竖向安装板2之间。
130.本实施例中,需要说明的是,牵引变电所为地铁接触网供电,将地铁接触网划分为多个区间,则牵引变电所的数量为多个,多个所述牵引变电所的数量与地铁接触网的区间数量相等且一一对应,每个牵引变电所具有两个输出端,每个所述输出端均与隔离开关的进线位连接,隔离开关的出线位分为两路,一路与该牵引变电所对应的地铁接触网连接,另一路通过跨区供电设备与该牵引变电所的另一个隔离开关的出线位连接;当多个牵引变电所中任意一个牵引变电所出线故障无法对与其对应的地铁接触网区间供电时,使该牵引变电所的两个输出端连接的两个隔离开关均位于隔离位置,并打开两个隔离开关的出线位之间的跨区供电设备,便于与该牵引变电所相邻的两个牵引变电所对该牵引变电所对应的地铁接触网区间供电。
131.本实施例中,在实际应用中,该三工位隔离开关还可以用于牵引供电系统接触轨的供电模式中。
132.如图1所示,本实施例中,所述进线位与第一牵引变电所的输出端连接,当所述隔离刀组件连接于进线板4和出线板10之间时,第一牵引变电所给地铁接触网供电;当所述隔离刀组件的另一端位于所述隔离位时,地铁接触网与第一牵引变电所断开,第二牵引变电所给地铁接触网供电;当所述隔离刀组件连接于接地板7和出线板10之间时,地铁接触网接地,对于对该隔离开关等电气设备进行检修。
133.本实施例中,本发明设计合理,通过采用集成式一体化设计来控制牵引变电所与地铁接触网之间连接线路的接通、断电和接地,通过设置限位机构实现隔离开关的机械互锁,通过设置检测器便于工作人员得知该隔离开关的工作状态,整体安装紧凑,占用空间小,机械互锁性能优越,不仅免去了检修前的验电、挂地线等准备阶段以及工作完成后的整理阶段,节约了时间成本,提高了工作效率,而且提高了操作人员和设备安全,有效防止误操作。
134.本实施例中,本发明采用三工位工作模式,设置有隔离位、进线位和接地位,一目了然,断点可见,实用性强,便于推广使用。
135.本实施例中,通过设置电气闭锁机构在隔离刀组件转动至所需工作位置后,所需工作位置对应的行程开关切断电源实现电气闭锁,使主轴停止转动,避免隔离刀组件到位后发生漂移,角度位置可靠稳定,使用效果好。
136.本实施例中,通过设置隔离位限位器在隔离刀组件转动至隔离位后,接地位限位器的限位杆直接卡装在限位盘38的卡槽内,使主轴停止转动,能够有效避免隔离刀在隔离位发生漂移,可靠稳定,使用效果好。
137.本实施例中,通过设置操作机构带动隔离刀组件转动,操作机构包括用于驱动隔离刀组件转动的电动驱动器和手动驱动器,在调试或电气故障时,可以通过手动驱动器操作隔离刀组件动作,且电动驱动器正常使用时,当手动驱动器操作隔离刀组件动作时,电动驱动器断电,防止电动驱动器的电机误动作造成人员伤害,安全性好。
138.本实施例中,前竖向安装板1和后竖向安装板2表面采用电泳漆处理,电泳漆具有较高的表面抗腐蚀能力,提高前竖向安装板1和后竖向安装板2的抗腐蚀能力。
139.如图1所示,本实施例中,所述进线位和所述接地位对称设置在所述出线位的两侧,所述进线位包括两个进线板安装杆3和套设在两个进线板安装杆3上的进线板4,所述进线板4与所述隔离刀组件配合的端部设置有进线板接触触头5;
140.所述接地位包括两个接地板安装杆6和套设在两个接地板安装杆6上的接地板7,所述接地板7与所述隔离刀组件配合的端部设置有接地板接触触头8;
141.所述出线位包括两个出线板安装杆9和套设在两个出线板安装杆9上的出线板10,所述出线板10与所述隔离刀组件配合的端部设置有多个出线板接触触头11。
142.本实施例中,需要说明的是,进线板4和接地板7均呈直角梯形,进线板接触触头5设置在进线板4的倾斜面上,接地板接触触头8设置在接地板7的倾斜面上,倾斜接触可以增大接触面积,提高该隔离开关的通流能力,延长该隔离开关的使用寿命;出线板10为矩形出线板,多个出线板接触触头11分别位于出线板10与隔离刀组件铰接的端部的左侧面、顶面和地面,便于加大隔离刀组件转动至不同位置处与出线板接触触头11的接触面积,保证该隔离开关的使用可靠性。
143.本实施例中,实际使用时,进线板4、接地板7和出线板10均采用t2导电用铜材,进线板4、接地板7和出线板10的表面均采用整体镀银处理;进线板接触触头5和进线板4,接地板接触触头8和接地板7,以及出线板接触触头11和出线板10均采用可拆卸连接,能够降低后期运营为成本。
144.如图1和图3所示,本实施例中,所述进线板安装杆3、接地板安装杆6和出线板安装杆9的结构相同,所述进线板安装杆3、接地板安装杆6和出线板安装杆9均包括依次连接的前连接螺栓12、前绝缘子13、支撑杆、后绝缘子14、后连接螺栓15,所述支撑杆上套设有支撑套16,所述前连接螺栓12与前竖向安装板1连接,所述后连接螺栓15与后竖向安装板2连接;
145.所述进线板4的数量为两个,两个所述进线板4中一个进线板4位于进线板安装杆3的支撑套16与进线板安装杆3的前绝缘子13之间,另一个进线板4位于进线板安装杆3的支撑套16与进线板安装杆3的后绝缘子14之间;
146.所述接地板7的数量为两个,两个所述接地板7中一个接地板7位于接地板安装杆6的支撑套16与接地板安装杆6的前绝缘子13之间,另一个进线板4位于接地板安装杆6的支撑套16与接地板安装杆6的后绝缘子14之间;
147.所述出线板10的数量为两个,两个所述出线板10中一个出线板10位于出线板安装杆9的支撑套16与出线板安装杆9的前绝缘子13之间,另一个出线板10位于出线板安装杆9的支撑套16与出线板安装杆9的后绝缘子14之间。
148.本实施例中,实际使用时,前连接螺栓12与前竖向安装板1的连接处,以及后连接螺栓15与后竖向安装板2的连接处均设置有绝缘板71,所述绝缘板71设置在前竖向安装板1和后竖向安装板2的内侧面,避免该隔离开关使用过程中前连接螺栓12和后连接螺栓15发生松动,导致该隔离开关对地放电,形成短路,提高该隔离开关的使用安全性。
149.本实施例中,采用前绝缘子13和后绝缘子14使进线板4、接地板7、出线板10与前竖向安装板1和后竖向安装板2之间绝缘。
150.本实施例中,实际使用时,进线板4、接地板7和出线板10表面均采用镀银处理,银
是较好的导电材料,能够更好地提高该隔离开关的通流能力。
151.本实施例中,通过设置两个进线板4、两个接地板7和两个出线板10提高该隔离开关的载流能力。
152.如图1、图2和图4所示,本实施例中,所述隔离刀组件包括前隔离刀压板17、第一隔离刀板18、第二隔离刀板19、第三隔离刀板20、第四隔离刀板21和后隔离刀压板22,以及设置在前隔离刀压板17和第一隔离刀板18之间、第二隔离刀板19与第三隔离刀板20之间、第四隔离刀板21与后隔离刀压板22之间的弹簧板23,定位连接杆24依次穿过前隔离刀压板17、前隔离刀压板17与第一隔离刀板18之间的弹簧板23、第一隔离刀板18、第二隔离刀板19、第二隔离刀板19与第三隔离刀板20之间的弹簧板23、第三隔离刀板20、第四隔离刀板21、第四隔离刀板21与后隔离刀压板22之间的弹簧板23,以及后隔离刀压板22将所述隔离刀组件连接为一体;
153.所述前隔离刀压板17和后隔离刀压板22的一端与出线板10铰接,且所述第一隔离刀板18、第二隔离刀板19、第三隔离刀板20和第四隔离刀板21的一端均与出线板10相贴合。
154.本实施例中,需要说明的是,所述隔离刀组件采用弹簧板压接方式,使隔离刀与进线板接触触头5、接地板接触触头8和出线板接触触头11的接触部分受力均匀,接触性能良好,提升载流能力,同时安装的体积较小,能够提高该隔离开关整体的绝缘性能。
155.本实施例中,所述第一隔离刀板18、第二隔离刀板19、第三隔离刀板20、第四隔离刀板21和弹簧板23的两端均设置有多个条形缝隙,使所述隔离刀组件受力均衡,且保证该隔离开关接触良好。
156.本实施例中,所述第一隔离刀板18、第二隔离刀板19、第三隔离刀板20和第四隔离刀板21均采用t2导电用铜材,所述第一隔离刀板18、第二隔离刀板19、第三隔离刀板20和第四隔离刀板21的表面整体镀银。
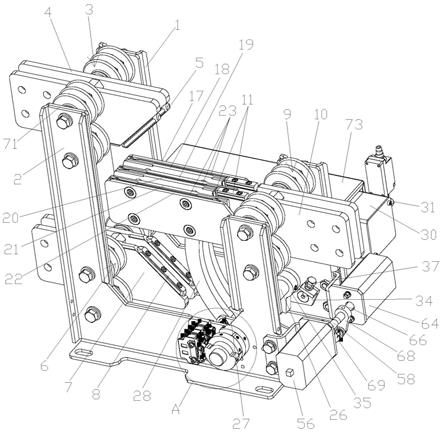
157.如图1、图2和图5所示,本实施例中,所述操作机构包括蜗轮蜗杆减速机25和与蜗轮蜗杆减速机25的输出轴传动连接的主轴26,以及用于带动蜗轮蜗杆减速机25的输出轴转动的电动驱动器和手动驱动器,所述主轴26上设置有两个铰接耳27,两个所述铰接耳27之间铰接有用于带动所述隔离刀组件转动的绝缘拉杆28;
158.所述电动驱动器包括电机29,所述电机29的输出轴与蜗轮蜗杆减速机25的蜗杆的一端传动连接;
159.所述手动驱动器包括安装箱30、设置在安装箱30内且伸出安装箱30的输入轴31和套设在输入轴31上的输入锥齿轮32,以及套设在蜗轮蜗杆减速机25的蜗杆的另一端且与输入锥齿轮32啮合的输出锥齿轮33。
160.本实施例中,需要说明的是,输入轴31的一端伸出安装箱30的前侧板,输入轴31伸出安装箱30的一端能够可拆卸连接用于带动输入轴31转动的手动把手,安装箱30的前侧板上设置有用于检测所述手动把手套设在输入轴31上的安全开关72,输入轴31与安全开关72的触头之间设置有间隙,当手动把手套设在输入轴31上,手动把手与安全开关72的触头发生碰撞使安全开关72接通,安全开关72接通使电机29断电,防止电机29误动作造成人员伤害,安全性好。
161.本实施例中,安全开关72优选为d4v
‑
8111z行程开关,电机29优的型号为hdz
‑
32050c,蜗轮蜗杆减速机25的型号为wj40
‑
20
‑
191031sx。
162.本实施例中,主轴26采用化学镀镍处理,使主轴26在具有良好的抗腐蚀性能的同时,表面也具有较高的硬度,耐磨性能好。
163.本实施例中,实际使用时,蜗轮蜗杆减速机25和电机29的外侧设置有保护盖73,所述保护盖73通过操作机构连接板74与前竖向安装板1连接为一体。
164.如图1、图2和图6所示,本实施例中,所述前竖向安装板1的内侧面上设置有限位板34,所述进线位限位器和所述接地位限位器对称设置在限位板34上且分别位于主轴26的两侧,所述主轴26上套设有与所述进线位限位器和所述接地位限位器配合的限位块35,所述进线位限位器包括设置在限位板34上且位于主轴26左侧的进线位限位螺栓36,所述接地位限位器包括设置在限位板34上且位于主轴26右侧的接地位限位螺栓37。
165.本实施例中,实际使用时,当限位块35与进线位限位螺栓36抵接时,隔离刀组件的另一端与进线板4连接导通,当限位块35与接地位限位螺栓37抵接时,隔离刀组件的另一端与接地板7连接导通。
166.如图1、图2和图7所示,本实施例中,所述隔离位限位器包括套设在主轴26上且与主轴26同步转动的限位盘38,以及与限位盘38配合且用于限制限位盘38转动的弹性限位件,所述限位盘38的圆周侧面上开设有卡槽47;
167.所述弹性限位件包括限位杆39和套设在限位杆39上的限位套40,以及套设在限位杆39上且位于限位杆39和限位套40之间的弹簧41,所述限位杆39的两端均伸出限位套40,所述限位杆39的一端与限位盘38上的卡槽47卡接配合,所述限位杆39的另一端通过连接杆42与电磁铁43的铁芯63的一端连接,所述电磁铁43的铁芯63的另一端连接有手动拉环44;
168.所述前竖向安装板1的外侧面设置有由于检测限位杆39位置的限位行程开关45,所述连接杆42上套设有与限位行程开关45配合的行程开关撞块46。
169.本实施例中,实际使用时,当电磁铁43出线故障上,可以手动拉动手动拉环44使限位杆39的一端脱离卡槽47,松开手动拉环44时,限位杆39能够在弹簧41的弹性作用力下回弹至卡槽47内。
170.本实施例中,需要说明的是,当限位杆39的一端卡装在卡槽47内时,行程开关撞块46不与限位行程开关45接触,限位行程开关45断开;当限位杆39的一端需要向左移动脱离卡槽47时,电磁铁43的铁芯63向左移动带动连接杆42和限位杆39移动,使限位杆39的一端脱离卡槽47,连接杆42向左移动带动行程开关撞块46向左移动,使行程开关撞块46碰撞使限位行程开关45接通,在限位行程开关45接通2s~3s后,限位行程开关45控制电磁铁43断电。
171.本实施例中,实际使用时,限位盘38通过限位盘固定件75固定在主轴26上,且限位盘38与主轴26同步转动。
172.本实施例中,所述电磁铁43和限位行程开关45均安装在限位件安装板76上,限位件安装板76与前竖向安装板1固定连接。
173.如图1、图2和图8所示,本实施例中,所述电气闭锁机构包括设置在后竖向安装板2的外侧面上的行程开关组件,以及套设在主轴26上且与所述行程开关组件配合的凸轮组件;
174.所述行程开关组件包括依次设置在后竖向安装板2的外侧面上且用于检测所述接地位导通信号的接地位行程开关48、用于检测进线位导通信号的进线位行程开关49,以及
均用于检测所述隔离位隔离信号的第一隔离位行程开关50和第二隔离位行程开关51;
175.所述凸轮组件包括依次套设在主轴26上且与接地位行程开关48配合的接地位检测凸轮52、与进线位行程开关49配合的进线位检测凸轮53、与第一隔离位行程开关50配合的第一隔离位检测凸轮54,以及与第二隔离位行程开关51配合的第二隔离位检测凸轮55。
176.本实施例中,当隔离刀组件的另一端与接地板7连接导通时,接地位检测凸轮52与接地位行程开关48碰撞,使接地位行程开关48接通,接地位行程开关48接通使电机29断电;当隔离刀组件的另一端与进线板4连接导通时,进线位检测凸轮53与进线位行程开关49碰撞,使进线位行程开关49接通,进线位行程开关49接通使电机29断电;当隔离刀组件的另一端由接地位转动至隔离位时,第二隔离位检测凸轮55与第二隔离位行程开关51碰撞,使第二隔离位行程开关51接通,第二隔离位行程开关51接通使电机29断电;当隔离刀组件的另一端由进线位转动至隔离位时,第一隔离位检测凸轮54与第一隔离位行程开关50碰撞,使第一隔离位行程开关50接通,第一隔离位行程开关50接通使电机29断电。
177.本实施例中,实际使用时,接地位行程开关48、进线位行程开关49、第一隔离位行程开关50和第二隔离位行程开关51均采用lxw22
‑
11b。
178.如图1、图2、图9、图10、图11、图12、图13和图14所示,本实施例中,所述检测器包括用于检测所述隔离刀组件与进线位连接导通或所述隔离刀组件与接地位连接导通的第一检测器,以及用于检测所述隔离刀隔离位组件位于隔离位的第二检测器;
179.所述第一检测器包括第一检测箱56、设置在第一检测箱56内的第一绝缘支架57、设置在第一绝缘支架57内且与第一绝缘支架57转动配合的第一旋转轴58,均设置在第一绝缘支架57上的进线位静触片和接地位静触片,以及套设在第一旋转轴58上且用于与所述进线位静触片或所述接地位静触片导通的第一动触片61,所述第一旋转轴58的两端均伸出第一检测箱56,所述第一旋转轴58的一端套设有第一连接拐臂62,所述第一连接拐臂62上铰接有第一连接杆,所述第一连接杆远离第一连接拐臂62的端部与两个铰接耳27中的一个铰接耳27铰接;
180.所述第二检测器包括第二检测箱64、设置在第二检测箱64内的第二绝缘支架65、设置在第二绝缘支架65内且与第二绝缘支架65转动配合的第二旋转轴66、设置在第二绝缘支架65上的隔离位静触片,以及套设在第二旋转轴66上且用于与所述隔离位静触片连接导通的第二动触片67,所述第二旋转轴66的两端均伸出第二检测箱64,所述第二旋转轴66的一端套设有第二连接拐臂68,所述第二连接拐臂68上铰接有第二连接杆69,所述第二连接杆69远离第二连接拐臂68的端部与两个铰接耳27中的另一个铰接耳27铰接。
181.本实施例中,需要说明的是,所述进线位静触片包括对称设置在第一绝缘支架57对角方向的第一进线位静触片59
‑
1和第一进线位静触片59
‑
2,所述接地位静触片包括对称设置在第一绝缘支架57对角方向的第一接地位静触片60
‑
1和第一接地位静触片60
‑
2,所述第一动触片61的数量为两个,两个第一动触片61对称设置在第一旋转轴58的两侧,且第一旋转轴58转动带动两个第一动触片61分别与第一进线位静触片59
‑
1和第一进线位静触片59
‑
2连接导通,或第一旋转轴58转动带动两个第一动触片61分别与第一接地位静触片60
‑
1和第一接地位静触片60
‑
2连接导通。
182.本实施例中,需要说明的是,所述隔离位静触片包括对称设置在第二绝缘支架65对角方向的第一隔离位静触片70
‑
1和第二隔离位静触片70
‑
2,所述第二动触片67的数量为
两个,两个所述第二动触片67对称设置在第二旋转轴66的两侧,第二旋转轴66转动带动两个第二动触片67分别与第一隔离位静触片70
‑
1和第二隔离位静触片70
‑
2连接导通。
183.一种城市轨道交通用三工位隔离开关的使用方法,包括以下步骤:
184.步骤一、隔离开关工作类型的分类:对隔离开关工作类型进行分类,隔离开关工作类型包括第一牵引变电所给出线位供电、出线位接地和第二牵引变电所给出线位供电;
185.当选择第一牵引变电所给出线位供电时,执行步骤二;
186.当选择出线位接地时,执行步骤三;
187.当选择第二牵引变电所给出线位供电时,执行步骤四;
188.步骤二、第一牵引变电所给出线位供电:第一牵引变电所给出线位供电的具体过程如下:
189.步骤201、根据检测器输出的信号判断隔离刀组件处于接地位或隔离位,当所述隔离刀组件处于接地位时,执行步骤202;当所述隔离刀组件处于隔离位时,执行步骤203;
190.步骤202、所述隔离刀组件由接地位转动至进线位的具体过程如下:
191.步骤2021、操作电机29的输出轴顺时针转动,电机29的输出轴顺时针转动带动蜗轮蜗杆减速机25的输出轴顺时针转动,蜗轮蜗杆减速机25的输出轴顺时针转动带动主轴26顺时针转动,主轴26顺时针转动带动铰接耳27、限位盘38和第二隔离位检测凸轮55顺时针同步转动;
192.步骤2022、铰接耳27顺时针转动带动绝缘拉杆28和第二检测器的第二连接杆69顺时针同步转动,在绝缘拉杆28顺时针转动的过程中,隔离刀组件的一端始终与出线板10连接导通,所述隔离刀组件的另一端随着绝缘拉杆28的转动顺时针转动,直至限位杆39的一端卡装至限位盘38的卡槽47内,限位盘38停止转动,此时,所述隔离刀组件与出线板10之间的夹角为180
°
,所述隔离刀组件的另一端位于隔离位,实现第二牵引变电所给出线位供电;其中,在限位杆39的一端卡装至卡槽47内的同时,第二隔离位检测凸轮55与第二隔离位行程开关51碰撞使第二隔离位行程开关51接通,第二隔离位行程开关51接通使电机29断电,进而使主轴26停止转动;
193.步骤2023、在第二连接杆69顺时针转动的过程中,第二连接杆69顺时针转动带动第二连接拐臂68顺时针转动,第二连接拐臂68顺时针转动带动第二旋转轴66顺时针转动,直至主轴26停止转动,主轴26停止转动时,第二旋转轴66上的第二动触片67与第二绝缘支架65上的隔离位静触片连接导通,第二检测器检测到所述隔离刀组件位于隔离位;
194.步骤2024、操作电磁铁43得电,电磁铁43得电使电磁铁43的铁芯向左移动,所述电磁铁43的铁芯向左移动带动连接杆42和限位杆39同步向左移动,使限位杆39的一端脱离限位盘38上的卡槽47,连接杆42向左移动带动行程开关撞块46向左移动,行程开关撞块46向左移动与限位行程开关45接触,使限位行程开关45接通,限位行程开关45接通2s~3s后,使电磁铁43失电;其中,电磁铁43的铁芯向左移动是指电磁铁43的铁芯向远离限位行程开关45的方向移动;
195.步骤2025、在限位行程开关45接通2s~3s内,再次操作电机29的输出轴顺时针转动,电机29的输出轴顺时针转动带动蜗轮蜗杆减速机25的输出轴顺时针转动,蜗轮蜗杆减速机25的输出轴顺时针转动带动主轴26顺时针转动,主轴26顺时针转动带动铰接耳27、限位块35和进线位检测凸轮53顺时针同步转动;
196.步骤2026、铰接耳27顺时针转动带动绝缘拉杆28和第一检测器的第一连接杆顺时针同步转动,在绝缘拉杆28顺时针转动的过程中,隔离刀组件的一端始终与出线板10连接导通,所述隔离刀组件的另一端随着绝缘拉杆28的转动顺时针转动,直至限位块35与设置在限位板34上的进线位限位螺栓36抵接,主轴26停止转动,此时,所述隔离刀组件的另一端与进线板4连接导通,实现第一牵引变电所给出线位供电;其中,在限位块35与设置在限位板34上的进线位限位螺栓36抵接的同时,进线位检测凸轮53与进线位行程开关49碰撞使进线位行程开关49接通,进线位行程开关49接通使电机29断电,进而使主轴26停止转动;
197.步骤2027、在第一连接杆顺时针转动的过程中,第一连接杆顺时针转动带动第一连接拐臂62顺时针转动,第一连接拐臂62顺时针转动带动第一旋转轴58顺时针转动,直至主轴26停止转动,主轴26停止转动时,第一旋转轴58上的第一动触片61与第一绝缘支架57上的进线位静触片连接导通,第一检测器检测到所述隔离刀组件的另一端与进线板4连接导通,第一牵引变电所给出线位供电;
198.步骤203、隔离刀组件从隔离位转动至进线位的过程与步骤2024至步骤2027的过程一致,使所述隔离刀组件由隔离位转动至进线位,实现第一牵引变电所给出线位供电;
199.步骤三、出线位接地:出线位接地的具体过程如下:
200.步骤301、根据检测器输出的信号判断隔离刀组件处于进线位或隔离位,当所述隔离刀组件处于进线位时,执行步骤302;当所述隔离刀组件处于隔离位时,执行步骤303;
201.步骤302、所述隔离刀组件由进线位转动至接地位的具体过程如下:
202.步骤3021、操作电机29的输出轴逆时针转动,电机29的输出轴逆时针转动带动蜗轮蜗杆减速机25的输出轴逆时针转动,蜗轮蜗杆减速机25的输出轴逆时针转动带动主轴26逆时针转动,主轴26逆时针转动带动铰接耳27、限位盘38和第一隔离位检测凸轮54逆时针同步转动;
203.步骤3022、铰接耳27逆时针转动带动绝缘拉杆28和第二检测器的第二连接杆69逆时针同步转动,在绝缘拉杆28逆时针转动的过程中,隔离刀组件的一端始终与出线板10连接导通,所述隔离刀组件的另一端随着绝缘拉杆28的转动逆时针转动,直至限位杆39的一端卡装至限位盘38的卡槽47内,限位盘38停止转动,此时,所述隔离刀组件与出线板10之间的夹角为180
°
,所述隔离刀组件的另一端位于隔离位,实现第二牵引变电所给出线位供电;其中,在限位杆39的一端卡装至卡槽47内的同时,第一隔离位检测凸轮54与第一隔离位行程开关50碰撞使第一隔离位行程开关50接通,第一隔离位行程开关50接通使电机29断电,进而使主轴26停止转动;
204.步骤3023、在第二连接杆69逆时针转动的过程中,第二连接杆69逆时针转动带动第二连接拐臂68逆时针转动,第二连接拐臂68逆时针转动带动第二旋转轴66逆时针转动,直至主轴26停止转动,主轴26停止转动时,第二旋转轴66上的第二动触片67与第二绝缘支架65上的隔离位静触片连接导通,第二检测器检测到所述隔离刀组件位于隔离位;
205.步骤3024、操作电磁铁43得电,电磁铁43得电使电磁铁43的铁芯向左移动,所述电磁铁43的铁芯向左移动带动连接杆42和限位杆39同步向左移动,使限位杆39的一端脱离限位盘38上的卡槽47,连接杆42向左移动带动行程开关撞块46向左移动,行程开关撞块46向左移动与限位行程开关45接触,使限位行程开关45接通,限位行程开关45接通2s~3s后,使电磁铁43失电;
206.步骤3025、在限位行程开关45接通2s~3s内,再次操作电机29的输出轴逆时针转动,电机29的输出轴逆时针转动带动蜗轮蜗杆减速机25的输出轴逆时针转动,蜗轮蜗杆减速机25的输出轴逆时针转动带动主轴26逆时针转动,主轴26逆时针转动带动铰接耳27、限位块35和进线位检测凸轮53逆时针同步转动;
207.步骤3026、铰接耳27逆时针转动带动绝缘拉杆28和第一检测器的第一连接杆逆时针同步转动,在绝缘拉杆28逆时针转动的过程中,隔离刀组件的一端始终与出线板10连接导通,所述隔离刀组件的另一端随着绝缘拉杆28的转动逆时针转动,直至限位块35与设置在限位板34上的接地位限位螺栓37抵接,主轴26停止转动,此时,所述隔离刀组件的另一端与接地板7连接导通,实现出线位接地;其中,在限位块35与设置在限位板34上的接地位限位螺栓37抵接的同时,接地位检测凸轮52与接地位行程开关48碰撞使接地位行程开关48接通,接地位行程开关48接通使电机29断电,进而使主轴26停止转动;
208.步骤3027、在第一连接杆逆时针转动的过程中,第一连接杆逆时针转动带动第一连接拐臂62逆时针转动,第一连接拐臂62逆时针转动带动第一旋转轴58逆时针转动,直至主轴26停止转动,主轴26停止转动时,第一旋转轴58上的第一动触片61与第一绝缘支架57上的接地位静触片连接导通,第一检测器检测到所述隔离刀组件的另一端与接地板7连接导通,出线位接地;
209.步骤303、隔离刀组件从隔离位转动至出线位的过程与步骤3024至步骤3027的过程一致,使所述隔离刀组件由隔离位转动至接地位,实现出线位接地;
210.步骤四、第二牵引变电所给出线位供电:第二牵引变电所给出线位供电的具体过程如下:
211.步骤401、根据检测器输出的信号判断隔离刀组件处于进线位或接地位,当所述隔离刀组件处于进线位时,执行步骤402;当所述隔离刀组件处于接地位时,执行步骤403;
212.步骤402、隔离刀组件从进线位转动至隔离位的过程与步骤3021至步骤3023的过程一致,使所述隔离刀组件由进线位转动至隔离位,使第二牵引变电所的输电线与出线位连通,实现第二牵引变电所给出线位供电;
213.步骤403、隔离刀组件从接地位转动至隔离位的过程与步骤2021至步骤2023的过程一直,使所述隔离刀组件由接地位转动至隔离位,使第二牵引变电所的输电线与出线位连通,实现第二牵引变电所给出线位供电。
214.本实施例中,需要说明的是,步骤2021和步骤2025中当电机29出线故障无法工作时,将手动把手套设在输入轴31上,操作手动把手逆时针转动,手动把手逆时针转动带动输入轴31逆时针转动,输入轴31逆时针转动带动输入锥齿轮32逆时针转动,输入锥齿轮32逆时针转动带动输出锥齿轮33顺时针转动,输出锥齿轮33顺时针转动带动蜗轮蜗杆减速机25的输出轴顺时针转动。
215.步骤2025中,在限位行程开关45接通2s~3s内,操作电机29的输出轴顺时针转动,在限位行程开关45接通2s~3s后,电磁铁43失电,限位杆39的一端在弹簧41的作用力下向右移动,此时,限位杆39的一端与限位盘38的圆周侧面接触且滑动配合,弹簧41处于压缩状态。
216.本实施例中,需要说明的是,步骤3021和步骤3025中当电机29出线故障无法工作时,将手动把手套设在输入轴31上,操作手动把手顺时针转动,手动把手顺时针转动带动输
入轴31顺时针转动,输入轴31顺时针转动带动输入锥齿轮32顺时针转动,输入锥齿轮32顺时针转动带动输出锥齿轮33逆时针转动,输出锥齿轮33逆时针转动带动蜗轮蜗杆减速机25的输出轴逆时针转动。
217.本实施例中,需要说明的是,步骤3022中,在隔离刀组件由进线位转动至隔离位的过程中,限位杆39的一端与限位盘38的圆周侧面接触且滑动配合,弹簧41处于压缩状态,当限位盘38转动至限位盘38上的卡槽47与限位杆39正对时,限位杆39在弹簧41的作用力下卡装置卡槽47内。
218.以上所述,仅是本发明的较佳实施例,并非对本发明作任何限制,凡是根据本发明技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均仍属于本发明技术方案的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。