1.本发明涉及一种用于中间电路转换器的控制装置和一种中间电路转换器。
背景技术:
2.大型机器,包括例如伺服压力机和液压机,在运行过程中会出现较大功率波动。因此,它们与动能存储器一起运行,以便将馈电功率最小化并且在中间电路中保持最小的功率分量。
3.对此,专利ep 2 525 481b1公开了一种用于中间电路转换器的控制装置,
4.‑
其中,中间电路转换器具有直流电压中间电路,其中布置有中间电路电容器,
5.‑
其中,中间电路转换器具有至少一个馈电转换器,经过该馈电转换器将电能从供电网络输送至直流电压中间电路中,
6.‑
其中,中间电路转换器具有至少一个负载转换器,经过负载转换器将电能从直流电压中间电路输送至有效负载,
7.‑
其中,中间电路转换器具有至少一个缓冲转换器,旋转的回转质量经过该缓冲转换器耦合到直流电压中间电路以进行双向的能量交换,
8.‑
其中,控制装置控制馈电转换器、负载转换器和缓冲转换器,
9.‑
其中,控制装置实现第一电压调节器,其中,根据额定电压和经过中间电路电容器下降的实际电压得出用于馈电转换器的额定电流并由此相应地驱控馈电转换器,
10.‑
其中,控制装置实现转速调节器,其中,根据额定转速和回转质量的实际转速得出用于回转质量的第一额定力矩分量,
11.‑
其中,所述控制装置实施第二电压调节器,其中,根据额定电压和实际电压得出用于回转质量的第二额定力矩分量,
12.‑
其中,将第一和第二额定力矩分量相加成额定力矩,并相应地驱控缓冲转换器。
13.专利ep 2 525 481b1还公开了一种中间电路转换器,
14.‑
其中,中间电路转换器具有直流电压中间电路,其中布置有中间电路电容器,
15.‑
其中,中间电路转换器具有至少一个馈电转换器,经过该馈电转换器将电能从供电网络馈送至直流电压中间电路中,
16.‑
其中,中间电路转换器具有至少一个负载转换器,经过负载转换器将电能从直流电压中间电路输送至有效负载,
17.‑
其中,中间电路转换器具有至少一个缓冲转换器,旋转的回转质量经过缓冲转换器耦合到直流电压中间电路以进行双向的能量交换,
18.‑
其中,中间电路转换器具有控制装置,控制装置控制馈电转换器、负载转换器和缓冲转换器,
19.‑
其中,控制装置根据本发明设计。
技术实现要素:
20.本发明的目的是对用于中间电路转换器的控制装置进行改进。
21.该目的通过一种用于中间电路转换器的控制装置实现,
22.‑
其中,中间电路转换器具有直流电压中间电路,在该直流电压中间电路中布置有中间电路电容器,
23.‑
其中,中间电路转换器具有至少一个馈电转换器,经过该馈电转换器将电能从供电网络馈送至直流电压中间电路中,
24.‑
其中,中间电路转换器具有至少一个负载转换器,经过该负载转换器将电能从直流电压中间电路传输至有效负载,
25.‑
其中,中间电路转换器具有至少一个缓冲转换器,动能存储器为了进行双向的能量交换而经过至少一个缓冲转换器耦合至直流电压中间电路,
26.‑
其中,控制装置控制馈电转换器、负载转换器和缓冲转换器,
27.‑
其中,控制装置实现第一电压调节器,在第一电压调节器中,根据额定电压和经过中间电路电容器下降的实际电压得出用于馈电转换器的额定电流并由此驱控馈电转换器,
28.‑
其中,控制装置实现转速调节器,在该转速调节器中,根据动能存储器的额定转速和实际转速得出用于动能存储器的第一额定力矩分量,
29.‑
其中,控制装置实现功率调节器,该功率调节器根据至少部分由馈电转换器得出的实际功率来得出用于动能存储器的基于功率的额定力矩分量,
30.‑
其中,将第一和基于功率的额定力矩分量相加成额定力矩并相应地驱控缓冲转换器。
31.本发明是有利的,因为由此扩展了在机械能量存储的情况下用于能量管理的调节方法或控制方法。一方面,本发明代表上述用于中间电路转换器的控制装置的良好替代。此外,简化并改进了各个机器的能量管理的可调节性。
32.在本发明的一个有利的实施方式中,实际功率根据实际电压和额定电流或根据实际电压和通过馈电转换器定向的实际电流形成。
33.特别优选地,实际功率根据通过馈电转换器定向的实际电流和实际电压形成。
34.在一个有利的实施方式中,功率调节器被设计为具有比例放大的p调节器。
35.在一个有利的实施方式中,功率调节器具有至少一个高通滤波器。
36.该高通滤波器尤其用于消除实际功率的直流分量。
37.在一个有利的实施方式中,用于消除高通滤波后的实际功率的交流分量的功率调节器的额定值是0(“零”)。
38.本发明是有利的,因为对于具有大的功率波动的机器,通过所描述的功率调节器能够良好地实现具有动能存储器的能量管理。功率调节器的调节变量有利地是馈电的电压调节器的设置变量。功率调节器有利地消除了它们的交流分量。
39.,由于需要为相同的调节变量(特别是电压,如ep 2 525 481b1中所述))设置两个调节器,因此不需要馈电的特定参数化。因此,能够利用工厂侧设置的标准参数来运行馈电。
40.能量管理的结果得到改进,因为中间电路电压设置为波动较小。
41.此外,有利的是,与ep 2 525 481b1中描述的解决方案不同,本发明在没有关于与中间电路连接、吸收功率或释放功率的参与者(例如伺服压力机)的功率要求的情况下进行管理。因此,该方法能够以与驱动无关的方式来实施。
42.利用本发明,还能够对现有系统进行改造,使得它们也进行能量管理。
43.这有利地利用所描述的调节、至少一个储能电机、至少一个转换器和控制单元来实现。
44.在一个有利的实施方式中,控制装置实现第二调压器,在第二电压调节器中根据额定电压和实际电压得出用于动能存储器的第二额定力矩分量,其中,在存在第一设施状态的情况下,激活第二电压调节器并停用功率调节器,其中,在存在第二设施状态的情况下,停用第二电压调节器并激活功率调节器,其中,在存在第一设施状态的情况下,将第一和第二额定力矩分量相加成额定力矩,并且相应地驱控缓冲转换器,其中,在存在第二系统状态的情况下,将第一和基于功率的额定力矩分量相加成额定力矩并相应地驱控缓冲转换器(8)。
45.在该实施方式中实现了功率调节器和第二电压调节器,但是两者中只有一个是以设施特定的方式作用。
46.该实施方式是有利的,因为一个控制装置能够用于多种类型的系统和要求。
47.在一个有利的实施方式中,第二电压调节器被设计为p调节器,并且第二电压调节器的比例放大被确定为,使得第二电压调节器在周期的一部分期间在很大程度上调整额定值跳跃。
48.在一个有利的设计方案中,瞬时功率需求以周期在最小值与最大值之间振荡,其中,第一电压调节器设计为pi调节器,其具有比例放大和复位时间,其中,第一电压调节器的比例放大和复位时间被确定为,使得第一电压调节器在周期期间将额定值跳跃调整至仅很小的程度。
49.在一个有利的实施方式中,控制装置附加地实现先导控制电路,其中,瞬时功率需求被输送至所述先导控制电路,其中,先导控制电路对瞬时功率需求进行高通滤波,其中,先导控制电路根据高通滤波后的瞬时功率需求得出先导控制信号,除了第一额定力矩分量和基于功率的额定力矩分量或第一额定力矩分量和第二额定力矩分量之外,该先导控制信号被添加到额定力矩中。
50.在一个有利的实施方式中,控制装置被设计成,使得在控制装置的第一运行状态中不仅激活基于功率的电压调节器而且还激活先导控制电路,并且在控制装置的第二运行状态中替代地激活基于功率的电压调节器并停用先导控制电路,或者停用基于功率的电压调节器并激活先导控制电路。
51.在一个有利的实施方式中,控制装置的第一运行状态是中间电路转换器的进行的运行,其中,控制装置的第二运行状态是中间电路转换器的启动。
52.在一个有利的实施方式中,先导控制电路附加地包括积分器和连接在积分器下游的延迟元件,其中,先导控制信号被输送至积分器,并且其中,积分的并且延迟的先导控制信号作为附加的输入信号被输送至转速调节器。
53.在一个有利的实施方式中,瞬时功率需求以周期在最小值与最大值之间振荡,其中,转速调节器设计为pi控制器,其具有比例放大和复位时间,其中,转速调节器的比例放
大和复位时间被确定为,使得转速调节器在部分的周期期间在很大程度上调整额定值跳跃。
54.在一个有利的设计方案中,瞬时功率需求以周期在最小值与最大值之间振荡,其中,转速调节器设计为pi控制器,具有比例放大和复位时间,并且其中,转速调节器的比例放大和复位时间被确定为,使得转速调节器在周期期间将额定值跳跃调整至仅很小的程度。
55.上述目的还通过一种中间电路转换器来实现,
56.‑
其中,中间电路转换器具有直流电压中间电路,在直流电压中间电路中布置有中间电路电容器,
57.‑
其中,中间电路转换器具有至少一个馈电转换器,经过该馈电转换器将电能从供电网络馈送至直流电压中间电路中,
58.‑
其中,中间电路转换器具有至少一个负载转换器,经过该负载转换器将直流电压中间电路的电能输送至有效负载,
59.‑
其中,中间电路转换器具有至少一个缓冲转换器,动能存储器为了进行双向的能量交换而通过至少一个缓冲转换器耦合至直流电压中间电路,
60.‑
其中,中间电路转换器具有控制装置,该控制装置控制馈电转换器、负载转换器和缓冲转换器,
61.‑
其中,控制装置如前所述地设计。
62.在一个有利的实施方式中,动能存储器被设计为旋转的回转质量。
63.动能存储器有利地被设计为旋转的回转质量。动能存储器替代地是电动旋转机器,特别是电动旋转机器的转子。此外,动能存储器也能够是具有惯性装置的电动旋转机器,例如在电动机轴处的盘。
64.该目的也通过具有这种中间电路转换器的成形机、特别是压力机来实现。
65.本发明特别适合于具有工具的直线相对运动的成形机。对此包括例如压力机、特别是螺旋压力机、液压压力机、伺服压力机和气动压力机。
66.本发明还适用于锻锤和离心机以及存在或需要动能存储的所有应用。
67.本发明提供了能够使功率保持恒定的优点。
附图说明
68.下面根据附图中示出的实施例更详细地描述和解释本发明。图中示出:
69.图1示出了具有直流电压中间电路的中间电路转换器,
70.图2示出了瞬间功率需求的可行曲线,
71.图3示出了控制装置的内部结构的可行的设计方案,
72.图4示出了具有先导控制电路的控制装置的内部结构的可行的设计方案,
73.图5示出了控制装置的内部结构的另一个可行的设计方案,
74.图6示出了图4和图5的高通滤波器的可行的设计方案,
75.图7示出了图4和图5的高通滤波器的可行的设计方案,
76.图8示出了连接模块的可行的设计方案,
77.图9示出了控制装置的内部结构的另一个可行的设计方案,以及
78.图10示出了具有中间电路转换器的成形机。
具体实施方式
79.图1示出了具有直流电压中间电路1的中间电路转换器99。在直流电压中间电路1中布置有中间电路电容器2。经过中间电路电容器2的实际电压u下降。该图还显示了馈电转换器3。
80.馈电转换器3被设计成使得电能经由馈电转换器3从供电网络4馈送至直流电压中间电路1中。馈电转换器3有利地是受控转换器。馈电转换器3有利地具有gto(=栅极截止晶闸管)或igbt(=绝缘栅极双极晶体管)。然而,其他半导体结构元件也是可行的。
81.该图还示出负载转换器5。负载转换器5被设计成使得电能经过负载转换器5从直流电压中间电路1被提供给有效负载6。
82.有效载荷优选地是伺服压力机的同步机,同步机例如以预定的移动模式上下移动压力机压头7。
83.有效载荷6优选周期性地运行。在这种情况下,有效载荷6的瞬时功率需求p*作为时间t的函数以周期t在最小值pmin与最大值pmax之间振荡。这在图2中示出。
84.中间电路转换器99在图中具有缓冲转换器8。,旋转的回转质量9在图中作为动能存储器的实例经由缓冲转换器8与直流电压中间电路1连接。这是有利的,因为它能够实现双向的交换能量。因此,能够将电能从直流电压中间电路1中耦合输出并进而加速回转质量9。也能够制动回转质量9并将电能馈入到直流电压中间电路1中。
85.因此,如图所示,动能存储器能够设计为旋转的回转质量。动能存储器也能够是电动旋转机器,特别是电动旋转机器的转子。此外,动能存储器也能够是具有惯性装置的电动旋转机器,例如在电动机轴处的盘。
86.回转质量9的加速和制动有利地在瞬时功率需求p*的时间过程中以推拉方式实现。由此,从供电网络4的平均功率消耗能够保持近似恒定。旋转的回转质量9优选是独立的回转质量,其通过法兰连接至电机。
87.替代地,回转质量9能够与电机本身的转子相同。特别是在这种情况下,电机能够设计成外转子电机。
88.图1还示出,中间电路转换器99具有控制装置10。控制装置10有利地被设计为可编程控制装置。其运行模式由系统程序11确定。系统程序11尤其包括机器代码12,其能够由控制装置10直接处理。有利地,中间电路转换器的用户不能改变系统程序11。系统程序11尤其确定中间电路转换器的各个转换器3、5和8的相互作用。
89.图2示出了瞬时功率需求p*的可行曲线。瞬时功率需求p*的时间曲线以及可能的其他时间曲线(例如速度曲线)能够根据需要预设。
90.最大值通常高于一兆瓦。最小值pmin处于(正)低千瓦范围内,或者在某些情况下甚至为负。如果最小值为负,则能够将电能回馈到直流电压中间电路1中,以实现负瞬时功率需求p*。
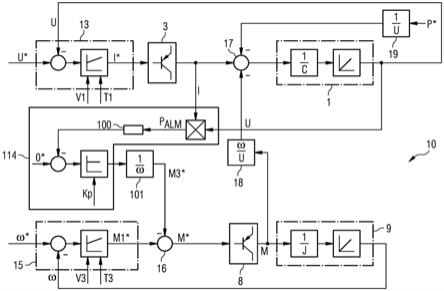
91.图3示出了控制装置10的内部结构的可行的设计方案。
92.控制装置10具有第一电压调节器13、转速调节器15和功率调节器114。功率调节器114的使用表示相对于上面已经提到的专利说明书ep 2525 481b1的结构的改进,其中,使
用了第二电压调节器。
93.如图所示,中间电路的额定电压u*和实际电压u、即经过中间电路电容器2下降的电压u被输送至第一电压调节器13。额定电压u*能够是随时间变化的。然而,额定电压优选是恒定的。第一电压调节器13根据额定电压u*和实际电压u得出用于馈电转换器3的额定电流i*。根据额定电流i*来控制馈电转换器3。
94.回转质量9的额定转速ω*和实际速度ω被输送至速度调节器15。额定转速ω*能够是随时间变化的或恒定的。如果额定转速ω*是可变的,则其相反于瞬时功率需求p*变化。转速调节器15根据额定转速ω*和实际转速ω得出回转质量9的第一额定力矩分量m1*。
95.实际电压u和额定电流i*被输送至功率调节器114。功率控制器114根据实际电压u和额定电流i*得出回转质量9的基于功率的额定力矩分量m3*。
96.第一额定力矩分量m1*和基于功率的额定力矩分量m3*被输送至节点16。在那里,额定力矩分量m1*和m3*被相加成额定力矩m*。
97.根据在节点16中得出的额定力矩m*驱控缓冲转换器8。在图3中,回转质量9的惯性矩设置有附图标记j,因此,回转质量以相应的实际力矩m加速或减速。
98.在节点17中,除了额定电流i*之外,还考虑额定力矩或实际力矩m*、m、优选实际力矩m、回转质量9和瞬时功率需求p*对直流电压中间电路1的影响。在考虑之前,回转质量9的力矩m和有效载荷6的瞬时功率需求p*有利地适当地缩放。这在框18、19中发生。分别在相应的框18和19中给出相应的缩放因子ω/u或1/u。
99.如图所示,第一电压调节器13优选设计为pi调节器。它具有比例放大v1和复位时间t1。由于第一电压调节器13仅应该在有限程度上对实际电压u的短暂波动做出反应,即对周期t内的波动做出反应,因此第一电压调节器13相对较弱的参数化。特别地,比例放大v1能够具有相对较小的值。此外,复位时间t1有利地具有相对较大的值。特别地,以这样的方式确定比例放大v1和复位时间t1,即,第一电压调节器13在周期t将额定值跳跃调整到仅很小份额,例如调节到5%至20%或最大25%。
100.如图所示,功率调节器114优选设计为p调节器。功率调节器114具有比例放大kp。
101.p调节器的测量值是实际功率,即从中间电路的实际电压u和馈电的额定电流i*计算得出的功率。实际输出p
alm
通过待参数化的高通滤波100从直流分量被释放。由于功率调节器的一个目标是消除交流分量,因此额定值为零(以0*表示)。在方框101中有利地利用比例因子1/ω进行比例缩放,以便获得回转质量9的基于功率的额定力矩分量m3*。
102.功率调节器114的比例放大kp有利地相对较大,因此功率调节器114也对实际电压u的短期波动做出反应。特别是,比例放大kp应该确定为,使得功率调节器114在周期t的一部分(最大为周期t的一半)的期间在很大程度上调整额定值跳跃,即至最少50%,更好的是至最少70%或更多。
103.如图所示,转速调节器15被设计为pi调节器。转速调节器15具有比例放大v3和复位时间t3。转速调节器15优选地相对较弱地被参数化。转速调节器15优选适用于与第一电压调节器13相同的设计标准。
104.图4示出了具有先导控制电路20的控制装置10的内部结构的可行的设计方案。
105.先导控制电路20具有高通滤波器21。瞬时功率需求p*被输送至高通滤波器21。瞬时功率需求p*在高通滤波器21中被高通滤波。先导控制电路20根据高通滤波后的瞬时功率
需求来得出先导控制信号mv*。特别地,在方框22中适当地缩放滤波后的瞬时功率需求。在块22中说明比例因子1/w。如图所示,先导控制信号mv*被输送至节点16,并且在那里被添加到第一额定力矩分量m1和基于功率的额定力矩分量m3*。因此,先导控制信号mv*被添加到额定力矩m*中。
106.可行的是,根据图4所示,功率调节器114和先导控制电路20都是永久激活的。替代地,可行的是,仅在控制装置10的第一运行状态下才是这种情况。在这种情况下,在控制装置10的第二运行状态下,两个所述的元件114、20之一,即功率调节器114或先导控制电路20能够被停用,而不是功率调节器114和先导控制电路20能够被停用。在控制装置10的第二运行状态下,相应的另一个元件20、114也被激活。在图4中通过虚线所示的相应的开关23显示出元件114、20的停用的可行性。控制装置10的第一运行状态尤其能够是中间电路转换器的正在进行的运行,其中,在第一运行状态中功率调节器114和先导控制电路20都被激活。控制装置10的第二运行状态尤其能够是中间电路转换器的启动,在该第二运行状态中,所述的元件114、20之一被停用。如果存在先导控制电路20,则能够根据图4所示将将先导控制限制为直接力矩先导控制。
107.替代地,根据图5可行的是,先导控制电路20附加地包括积分器24和延迟元件25。
108.图5示出了控制装置10的内部结构的另一个可行的设计方案。
109.图中示出,延迟元件25连接在积分器24的下游。在这种情况下,先导控制信号mv*除了接入节点16中之外还被输送至积分器24并在那里积分。积分器24的输出信号被输送至延迟元件25,在那里延迟一个延迟时间。积分且延迟的先导控制信号作为附加的输入信号被输送至转速调节器15。延迟元件25的延迟优选地以这样的方式来确定,使得该延迟补偿实际发生的延迟,即,在节点16处的预控制信号mv*的接入与由此引起的实际速度ω的变化之间经过的时间段。
110.在图5的设计方案中,转速调节器15能够类似于图3和图4的设计方案被参数化。然而,与图3和图4中的设计方案相反,在根据图5的设计方案中,能够更强有力地对转速调节器15进行参数化。特别地,在根据图5的设计方案中,转速调节器15的比例放大v3和复位时间t3能够以这样的方式确定,使得转速调节器15在周期t的一部分的期间在很大程度上调整额定值跳跃。
111.图6示出了图4和图5的高通滤波器的可行的设计方案。
112.为了实现图4和图5的高通滤波器21,控制装置10能够例如实现如下所述的结构。根据图6,检测有效载荷6(或相应的电驱动器)的瞬时功率p和瞬时转速ω'。转速ω
′
在方框26中以有效载荷6的有效惯性矩j
′
标度,在方框27中以瞬时转速ω
′
标度瞬时功率p。进一步处理标度的变量。如图所示,高通滤波器21具有积分器28和平均值形成器29。
113.在积分器28之前,在平均值形成器29之后,并且在积分器28与平均值形成器29之间分别有一个节点30至32。标度的瞬时功率和平均值形成器29的输出信号(带有负号)被输送至积分器28之前的节点30。一方面,积分器28的输出信号,另一方面(带有负号的)标度的转速ω'被输送至积分器28与平均值形成器29之间的节点32。标度的瞬时功率和平均值形成器29的输出信号(带有负号)被输送至平均值形成器29后面的节点31。在方框33中,以有效载荷6的瞬时转速ω
′
标度在节点31处得出的信号。
114.平均值形成器29利用时间常数k1平均输入给它的输入信号。能够自由选择时间常
数k1。通过时间常数调节高通滤波器21的频率特性。时间常数k1优选大于周期t。特别地,两个变量k1和t之比能够在2至10之间。
115.图7示出了图4和图5的高通滤波器的可行的设计方案。
116.在根据图6的设计方案中,有效载荷力矩被高通滤波。根据图7直接使用有用功率是更有利的。在图7中,代替有效载荷6的转速ω’使用有效载荷6的旋转加速度α’。高通滤波器21的结构也能够从图7中看出。所使用的附图标记和尺寸对应于图6的附图标记和尺寸。
117.图8示出了连接模块的可行的设计方案。
118.为了实现积图5中的分器24连同下游连接的延迟元件25,控制装置10能够例如实现一种结构,该结构将在下面更详细地说明。根据图8,积分器24与平均值形成器34并联连接。节点35也布置在积分器24的上游。先导控制信号mv*和平均值形成器34的输出信号(带有负号)被输送至节点35。积分器24的输出信号一方面作为附加的输入信号被输送至转速调节器15,另一方面作为其输入信号被输送送至平均值形成器34。平均值形成器34对应于图5的延迟元件25的实现。平均值形成器利用时间常数k2平均提供给它的输入信号。能够自由选择时间常数k2。通过时间常数调节延迟元件25的时间延迟。
119.本发明是有利的,因为它易于实现并且工作可靠。
120.图9示出了控制装置的内部结构的另一个可行的设计方案。
121.该图示出了包括功率调节器114和第二电压调节器14的控制装置10。控制装置10实现了第二电压调节器14,其中,根据额定电压u*和实际电压u得出用于动能存储器的第二额定力矩分量m2*。
122.当存在第一设施状态的情况下,有利地,第二电压调节器14被激活并且功率调节器114被停用。在存在第二设施状态的情况下,则有利地停用第二电压调节器14并且激活功率调节器114。
123.在存在第一设施状态的情况下,第一和第二额定力矩分量m1*和m2*相加成额定力矩m*,并相应地驱控缓冲转换器8;在存在第二设施状态的情况下,第一额定力矩分量和基于功率的额定力矩分量m1*和m3*相加成额定力矩m*并相应地驱控缓冲变流器8。
124.如图所示,这是通过双向开关102来实现的。双向开关102能够有利地根据设施状态进行切换。未示出如何操作双向开关102。但是,这优选通过参数化来实现。
125.因此,能够实现功率调节器114和第二电压调节器14,但是两者中的仅一个以设施特定的方式起作用。
126.这种设计方案是有利的,因为一个控制装置能够用于多个设施类型的和要求。
127.图4、5、6、7和8中描述的设计方案也能够在图1中描述的设计方案中使用。
128.图10示出了具有中间电路转换器99的成形机105。
129.成形机105具有工具的直线相对运动。成形机105优选是压力机,特别是螺旋压力机、液压压力机、伺服压力机或气动压力机。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

