交错存取操作以促进两个磁盘表面的同时存取的数据存储装置
背景技术:
1.例如磁盘驱动器的数据存储装置包括磁盘和连接到致动器臂的远端的磁头,所述致动器臂由音圈电机(vcm)围绕枢轴旋转以将磁头径向地定位在磁盘上。磁盘包括用于记录用户数据扇区和嵌入的伺服扇区的多个径向间隔的同心磁道。嵌入的伺服扇区包括磁头定位信息(例如,磁道地址),其由磁头读取并由伺服控制器进行处理,以在致动器臂在磁道之间寻道时控制致动器臂的速度。
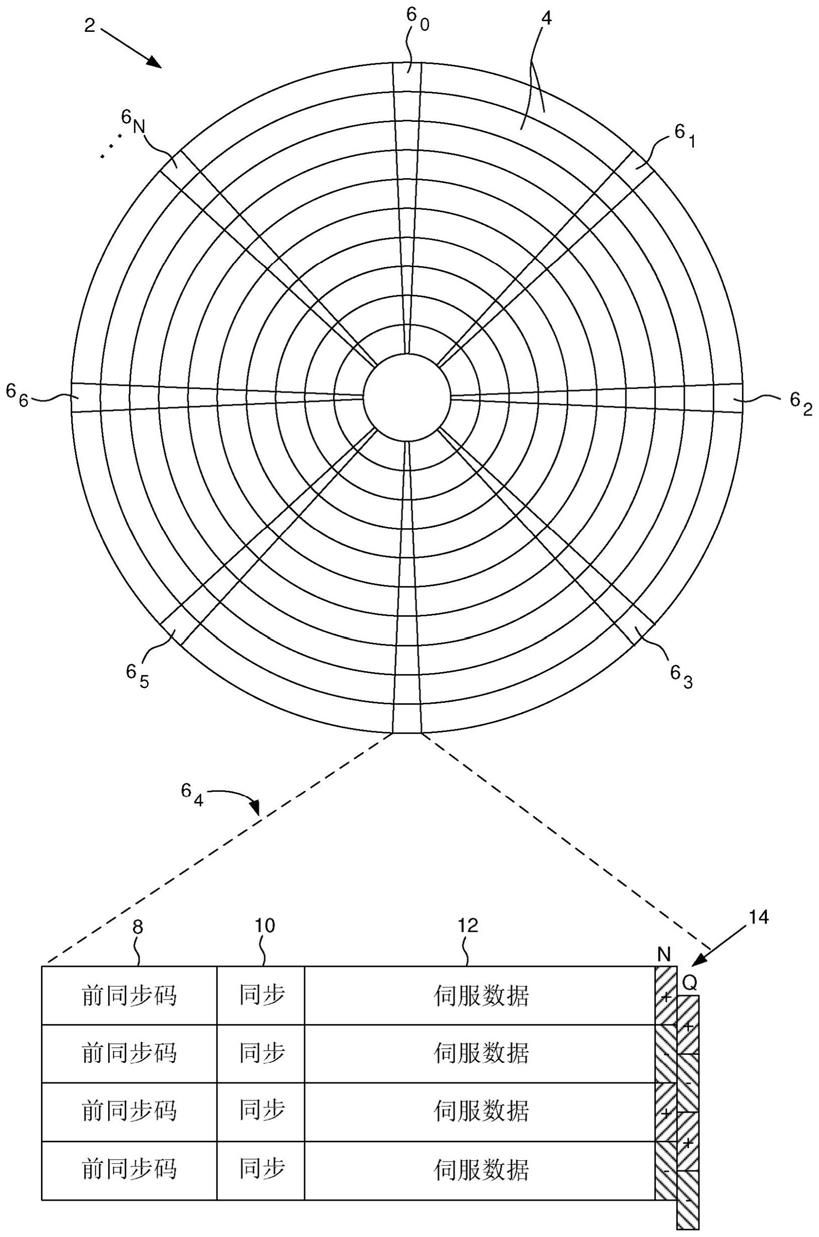
2.磁盘驱动器通常包括各自具有由相应磁头存取的顶部和底部表面的多个磁盘。也就是说,vcm通常使多个致动器臂围绕枢轴旋转,以便基于每一磁盘表面上记录的伺服数据同时将多个磁头定位在相应磁盘表面上。图1将现有技术磁盘格式2示为包括多个伺服磁道4,其由在每一伺服磁道的圆周周围记录的伺服扇区60到6
n
限定。每一伺服扇区6
i
包括前同步码8,其用于存储允许读取信号的适当增益调整和时序同步的周期性模式;和同步标记10,其用于存储用于符号同步到伺服数据字段12的特殊模式。伺服数据字段12存储用于在寻道操作期间将磁头定位在目标数据磁道上的粗略磁头定位信息,例如伺服磁道地址。每一伺服扇区6
i
进一步包括多组伺服脉冲14(例如,n和q伺服脉冲),其以相对于彼此且相对于伺服磁道中心线的预定相位记录。基于相位的伺服脉冲14在写入/读取操作期间存取数据磁道时提供用于中心线跟踪的精细磁头位置信息。通过读取伺服脉冲14生成位置误差信号(pes),其中pes表示磁头相对于目标伺服磁道的中心线的所测量位置。伺服控制器处理pes以生成施加到磁头致动器(例如,音圈电机)的控制信号,以便在减小pes的方向上在磁盘上径向地致动磁头。
附图说明
3.图1示出包括由伺服扇区限定的多个伺服磁道的现有技术磁盘格式。
4.图2a和2b示出呈磁盘驱动器形式的数据存储装置,所述数据存储装置包括使用第一精细致动器在第一磁盘表面上致动的第一磁头以及使用第二精细致动器在第二磁盘表面上致动的第二磁头。
5.图2c是根据实施例的流程图,其中用于每个精细致动器的偏置信号进行校准并用于伺服在其相应磁盘表面上的每一磁头。
6.图2d示出实施例,其中每一磁头包括从写入元件径向偏移的读取元件。
7.图3a示出根据实施例的伺服控制系统,其中校准的偏置信号应用于相应的精细致动器。
8.图3b示出根据实施例的伺服控制系统,其中所述精细致动器控制信号通过粗略致动器补偿器平衡以实现目标比率。
9.图4a示出实施例,其中每一偏置信号引起精细致动器的对应径向移位,以便补偿第一和第二磁头的径向偏移。
10.图4b示出实施例,其中用于第一磁头的偏置信号大于用于第二磁头的偏置信号,
以补偿第一精细致动器的冲程大于第二精细致动器的冲程。
11.图5a和5b示出用于通过读取第一和第二磁盘表面上的磁道来校准偏置信号的实施例。
12.图6是根据实施例的流程图,其中偏置信号基于每一精细致动器的所测量增益来校准偏置信号。
13.图7是根据实施例的流程图,其中基于每一精细致动器的所测量冲程来校准偏置信号。
14.图8是根据实施例的流程图,其中更新偏置信号以补偿例如温度的操作条件的变化。
15.图9是根据实施例的流程图,其中针对不同温度校准偏置信号,并且在正常操作期间,基于测量到的操作温度更新偏置信号。
16.图10示出实施例,其中磁盘驱动器包括具有在顶部和底部磁盘表面上致动的顶部和顶部磁头的多个磁盘。
17.图11a到11d示出实施例,其中写入/读取元件可以具有相对于每个磁头的不同径向偏移。
18.图12a和12b示出实施例,其中第二磁盘表面上的数据磁道限定成具有相对于第一磁盘表面上的数据磁道的径向偏移,以考虑第一和第二磁头的径向偏移。
19.图13a和13b示出另一实施例,其中第二磁盘表面上的数据磁道限定成具有相对于第一磁盘表面上的数据磁道的径向偏移,以考虑第一和第二磁头的径向偏移。
20.图14是根据实施例的流程图,其中基于伺服扇区以及第一和第二磁头的所测量偏移来限定第二磁盘表面上的数据磁道。
21.图15是根据实施例的流程图,其中在单存取间隔期间存取第一磁盘表面,然后在双存取间隔期间同时存取第一和第二磁盘表面。
22.图16a和16b示出实施例,其中在单存取间隔期间将数据写入到底部磁盘表面,然后在双存取间隔期间将数据同时写入到底部磁盘表面和顶部磁盘表面。
23.图17a和17b示出实施例,其中在单存取间隔期间从底部磁盘表面读取数据,然后在双存取间隔期间从底部磁盘表面和底部磁盘表面同时读取数据。
具体实施方式
24.图2a和2b示出根据实施例的呈磁盘驱动器形式的数据存储装置,所述数据存储装置包括:第一磁盘表面161;第一磁头181;第二磁盘表面162;第二磁头182;粗略致动器20(例如,vcm),所述粗略致动器被配置成致动第一磁盘表面161上的第一磁头181以及第二磁盘表面162上的第二磁头182;第一精细致动器221,所述第一精细致动器被配置成致动第一磁盘表面161上的第一磁头181;以及第二精细致动器222,所述第二精细致动器被配置成致动第二磁盘表面162上的第二磁头182。磁盘驱动器进一步包括配置成执行图2c的流程图的控制电路系统24,其中校准第一精细致动器的第一偏置信号(框26)并且校准第二精细致动器的第二偏置信号(框28)。基于第一偏置信号控制第一精细致动器并且基于第二偏置信号控制第二精细致动器,以同时存取第一磁盘表面和第二磁盘表面(框30)。
25.在图2a的实施例中,每一磁盘表面包括限定多个伺服磁道的多个伺服扇区320到
32
n
,其中相对于伺服磁道以相同或不同径向密度限定数据磁道34。控制电路系统24处理从磁头发出的读取信号36,以解调伺服扇区并生成位置误差信号(pes),所述pes表示磁头的实际位置与相对于目标磁道的目标位置之间的误差。控制电路系统24中的伺服控制系统使用合适的补偿滤波器对pes进行滤波,以生成施加到粗略致动器20(例如,vcm)的控制信号38,所述粗略致动器使致动器臂40围绕枢轴旋转,以便在减小pes的方向上径向地在磁盘表面上致动磁头。每一磁头还使用例如压电(pzt)致动器的精细致动器进行伺服,所述精细致动器被配置成相对于致动器臂40致动悬架和/或被配置成相对于悬架致动磁头。伺服扇区320到32
n
可以包括任何合适的磁头位置信息,例如用于粗略定位的磁道地址和用于精细定位的伺服脉冲。伺服脉冲可以包括任何合适的模式,例如基于幅度的伺服模式或基于相位的伺服模式(图1)。
26.在图2d中所示的一个实施例中,每个磁头包括写入元件42以及可能由于制造公差而径向偏移的读取元件44。另外,由于磁头的偏斜角,写入元件42与读取元件44之间的径向偏移可以基于磁头的径向位置而改变。也就是说,磁头的偏斜角从磁盘的外径(od)改变到磁盘的中径(md)并且从md改变到磁盘的内径(id),如图2d中所示。写入/读取元件之间的径向偏移的范围可以从一部分伺服磁道到一个或多个伺服磁道。因此,为了将数据写入到目标数据磁道,在将写入元件42定位在目标数据磁道上的径向位置处对读取元件44进行伺服(基于伺服扇区320‑
32
n
),由此考虑写入/读取元件之间的径向偏移。
27.在一个实施例中,控制电路系统24执行同时存取操作,以便同时存取第一和第二磁盘表面,所述第一和第二磁盘表面在图2b的实施例中又是磁盘的顶部和底部表面。在此实施例中,粗略致动器20以粗略移动对顶部和底部磁头两者进行伺服,而精细致动器221和222以精细移动在相应磁盘表面上对相应磁头进行伺服。也就是说,在一个实施例中,粗略致动器20补偿磁头相对于目标数据磁道的低频偏差,然而精细致动器221和222补偿高频偏差。在一个实施例中,由于例如底部和顶部磁头的写入元件之间的径向偏移,因此可以存在顶部和底部数据磁道之间的径向偏移。例如,在一个实施例中,可以将伺服扇区组伺服写入到顶部和底部磁盘表面,其中顶部和底部磁头的写入元件之间的径向偏移显示为写入伺服磁道的径向偏移。
28.另外,由于制造公差,可以存在顶部和底部磁头之间的读取元件的径向偏移。因此,当执行对顶部和底部磁盘表面的同时写入操作或同时读取操作时,读取元件之间的径向偏移意味着读取元件将以相对于粗略致动器的中间位置对应dc偏移进行跟踪。类似地,当控制电路系统正将数据写入到顶部磁盘表面并且同时从底部磁盘表面读取数据时,由于上文参考图2d所描述的写入/读取元件之间的径向偏移,存在顶部和底部磁头的读取元件之间的径向偏移。也就是说,顶部磁头的读取元件从目标数据磁道偏移,以便将写入元件定位在目标数据磁道上,然而底部磁头的读取元件定位在目标数据磁道上。同样,这种径向偏移引起每个精细致动器以相对于粗略致动器的中间位置的对应dc偏移进行跟踪。
29.图3a示出根据实施例的伺服控制系统,其中粗略致动器包括vcm 20,所述vcm被配置成使致动器臂围绕枢轴旋转,以便以粗略移动致动磁头181和182,然而精细致动器221和222被配置成在跟踪相应数据磁道的中心线时相对于vcm 20的中间位置以精细移动致动磁头。第一位置估计器461处理来自第一磁头181的读取信号,同时读取伺服扇区以生成第一位置信号481,并且第二位置估计器462处理来自第二磁头182的读取信号,同时读取伺服扇区
以生成第二位置信号482。从相应参考ref1和ref2中减去位置信号以生成相应的位置误差信号(pes)501和502。第一精细致动器补偿器521处理第一pes 501以生成第一补偿信号541,并且第二精细致动器补偿器522处理第二pes 502以生成第二补偿信号542。将第一偏置信号bias1加入到第一补偿信号541以生成施加到第一精细致动器221的第一控制信号561。将第二偏置信号bias2添加到第二补偿信号542以生成施加到第二精细致动器222的第二控制信号562。在一个实施例中,配置偏置信号bias1和bias2,使得相应磁头实现相对于vcm 20的中间位置的目标径向偏移,其中目标径向偏移对应于在上述同时存取操作期间在磁头之间的径向偏移。控制信号561和562随后操作以相对于由偏置信号建立的dc偏移以精细移动伺服每一磁头。pes501和/或502中的一个或两个由vcm补偿器58处理以生成施加到vcm 20的vcm控制信号60,以便例如当对目标数据磁道的磁头进行寻道时或在跟踪操作期间以粗略移动伺服磁头181和182。
30.图3b示出根据实施例的伺服控制系统,其中精细致动器控制信号561和562由vcm补偿器58处理以控制vcm 20,以便平均地实现控制信号561和562的目标比率。例如,在两个精细致动器221和222在增益和冲程方面具有基本上相同的性能的实施例中,控制信号561和562的目标比率可以是50/50,使得vcm 20平均保持在两个精细致动器移动之间的中间位置处,由此确保两个精细致动器以基本上相等的冲程能力操作,同时并行地以精细移动伺服磁头。在下文描述的实施例中,图3b的伺服控制系统还可以用于在校准过程期间校准精细致动器的偏置信号。
31.图4a示出实例实施例,其中第一磁头181的读取元件441在第一磁盘表面161的第一数据磁道62上进行伺服,并且第二磁头182的读取元件442在第二磁盘表面162(例如,相同磁盘的顶部和底部磁盘表面)的第二数据磁道64上进行伺服。在一个实施例中,第一数据磁道62与第二数据磁道64之间的径向偏移可以是一部分数据磁道宽度,并且在另一实施例中,径向偏移可以是若干数据磁道(如从任一磁盘表面测量)。如上文所描述,由于制造公差、伺服写入异常、当写入到一个数据磁道并从另一数据磁道读取时的写入器/读取器偏移等,当读取元件441和442位于其相应数据磁道上时存在所述读取元件之间的径向偏移。在此实施例中,施加到每个精细致动器的偏置信号基本上相同,因此每个精细致动器相对于致动器臂40的角位移基本上相同,如图4a所示。也就是说,在此实例中,施加到每个精细致动器的偏置信号引起读取元件441和442之间的径向偏移,所述径向偏移基本上等于完全径向偏移的一半。因此,粗略致动器20的中间或dc位置对应于致动器臂40位于读取元件441和442之间的中点处。
32.在图4b中所示的实施例中,在每个读取元件441和442之间的径向偏移的比率可以不同于50%,以补偿第一和第二精细致动器之间的不同冲程。也就是说,可以测量每个精细致动器的冲程,然后基于所测量冲程配置径向偏移的比率。在图4b的实例中,用于致动第一读取元件441的第一精细致动器的冲程大于用于致动第二读取元件442的第二精细致动器的冲程,因此,在此实施例中,配置精细致动器的偏置信号,使得第二读取元件442相对于致动器臂40的径向偏移小于第一读取元件441的径向偏移(即,第一偏置信号被配置成大于第二偏置信号)。以此方式,第一和第二精细致动器两者能够在同时存取操作期间跟踪读取元件相对于目标数据磁道的高频偏差。
33.任何合适的技术可以用于校准施加到精细致动器的偏置信号,例如在图3a的伺服
控制系统中的偏置信号bias1和bias2。在一个实施例中,图3b的伺服控制系统可以用于在校准过程期间,例如在制造过程期间校准偏置信号。在此实施例中,将偏置信号bias1和bias2归零,使得最初不存在施加到精细致动器的偏置偏移。参考信号ref1和ref2被配置成对应于每一磁盘表面的目标径向位置,例如,每一磁盘表面的目标数据磁道。伺服控制系统随后控制精细致动器221和222以朝向其相应目标径向位置移动磁头的读取元件,而vcm补偿器58控制vcm 20,以便基于目标比率(例如,50/50)平衡精细致动器控制信号561和561。最后,每个精细致动器控制信号561和562的dc分量将会聚到某一值,所述值对应于例如图4a中所示的读取元件之间的径向偏移。在每个精细致动器控制信号561和561的dc分量会聚之后,将dc分量保存为偏置信号bias1 bias2以在正常存取操作期间使用。
34.在一个实施例中,用于精细致动器的偏置信号可以在磁盘表面上的多个不同的径向位置处进行校准,以考虑磁头的变化斜角、变化的数据磁道密度(tpi)、精细致动器的非线性增益等。在一个实施例中,可以将多个校准的偏置信号曲线拟合到可以用于在任何给定的径向位置处生成偏置信号的任何合适函数(例如,多项式)。在下文更详细地描述的又另一实施例中,用于精细致动器的偏置信号可以在不同操作温度下进行校准,并且在正常存取操作期间基于所测量操作温度来配置偏置信号。
35.图5a和5b示出用于校准精细致动器的偏置信号的另一技术。在此实施例中,将偏置信号归零,使得最初不存在施加到精细致动器的偏置偏移。随后控制粗略致动器20以将第一磁头(例如,顶部磁头)的第一读取元件441移动到目标径向位置,例如第一磁盘表面的第一数据磁道62。在第一读取元件441已建立在目标上之后,通过读取第二磁盘表面上的伺服扇区来测量第二磁头(例如,底部磁头)的第二读取元件442的位置。随后控制粗略致动器20以将第二磁头(例如,底部磁头)的第二读取元件442移动到目标径向位置,例如第二磁盘表面的第二数据磁道64。在第二读取元件442已建立在目标上之后,通过读取第一磁盘表面上的伺服扇区来测量第一磁头(例如,顶部磁头)的第一读取元件441的位置。以此方式,可以将例如图4a中所示的读取元件之间的径向偏移测量为读取元件的所测量位置之间的差。在一个实施例中,随后可以将这种所测量径向偏移转换成对应的偏置信号,所述偏置信号将实现例如图4a或图4b中所示的每个精细致动器的偏置径向偏移。
36.在一个实施例中,基于所测量径向偏移生成的偏置信号可以用作初始值,以例如通过图3b的伺服控制系统执行正常存取操作。也就是说,偏置信号的初始值可以提供最佳值的相对良好估计,因此减少在寻道操作之后磁头的建立时间。在一个实施例中,可以基于控制信号561和562的dc分量来更新偏置信号的初始值(例如,通过将dc分量添加到偏置信号)。更新的偏置信号可以存储在非易失性存储器中(例如,在通过径向位置索引化的表中)并且用于后续存取操作。
37.图6是根据实施例的流程图,其中测量精细致动器221和222的增益(框66),并且基于所测量增益校准精细致动器偏置信号(框68)。可以出于任何合适的原因使用所测量增益,例如以生成表示每一磁头相对于施加到精细致动器的控制信号56的径向位移的函数。此函数随后可以用于基于上述读取元件之间的所测量径向偏移来计算偏置信号。在另一实施例中,精细致动器的所测量增益可以用于配置图3b的伺服控制系统的精细致动器控制信号561和562的比率。例如,在一个实施例中,控制信号561和562的比率可以被配置成基本上匹配增益的比率,以补偿增益之间的差。在另一实施例中,精细致动器控制信号561和562可
以基于所测量增益的比率来缩放,以补偿增益之间的差。
38.图7是根据实施例的流程图,其中测量精细致动器221和222的冲程(框70),并且基于所测量冲程校准精细致动器偏置信号(框72)。可以出于任何合适的原因使用所测量冲程,例如以配置上文参考图4b的实例描述的每一读取元件441和442的径向偏移。在此实施例中,具有较大冲程的精细致动器以相对于致动器臂40的较大径向偏移移位,由此最大化在存取操作期间两个精细致动器相对于致动器臂40的组合冲程。
39.图8是根据实施例的流程图,其中在校准精细致动器控制信号(框74)之后,在存取操作期间例如通过图3b的伺服控制系统控制精细致动器221和222。在一个实施例中,作为执行寻道操作的一部分,将精细致动器偏置信号调整成在结束寻道时对应于目标径向位置。在一个实施例中,可以在寻道期间逐渐进行对偏置信号的调整,以避免将瞬变注入到伺服控制系统中。以此方式,当读取元件441和442在寻道结束时到达目标数据磁道时,由于偏置信号将处于其最佳值处或附近,因此减少寻道的建立时间。在一个实施例中,数据存储装置的操作条件的变化可能会影响精细致动器偏置信号的最佳值。例如,例如操作温度的环境条件的变化可能导致磁盘表面和/或致动元件的热膨胀,由此改变上文参考图4a描述的读取元件之间的径向偏移。在其它实施例中,精细致动器221和222中的一个或两个的性能可以随时间降低,这还可能会影响读取元件之间的径向偏移。因此,在图8的实施例中,当触发精细致动器偏置信号的更新(框78)时,以任何合适方式更新精细致动器偏置信号。例如,在一个实施例中,精细致动器控制信号561和562的dc分量可以用于更新上述精细致动器偏置信号。在另一实施例中,可以通过在如上文参考图5a和5b描述的不同径向位置处测量读取元件之间的径向偏移来更新偏置信号。当检测到操作条件的变化(例如,温度的变化)时,当检测到影响磁盘驱动器的物理振动时、当寻道的平均建立时间超过阈值等时,可以通过周期性间隔触发更新。
40.图9是根据实施例的流程图,其中例如在制造过程期间,可以针对多个径向位置在不同操作温度下校准精细致动器偏置信号(框82)。在正常操作期间,测量操作温度(框84)并且基于对应于所测量温度的偏置信号来控制精细致动器(框86)。可以例如在每一寻道操作之前重新测量操作温度(框88),并且当操作温度的差量超过阈值时(框90),可以对应于所测量温度来更新精细致动器偏置信号(框92)。类似于图8的流程图,此实施例可以补偿磁盘表面和/或致动元件的热膨胀,这可以改变上文参考图4a描述的读取元件之间的径向偏移。然而,与对伺服性能的所测量下降作出反应相比,此实施例可以使精细致动器偏置信号更快地适应操作温度的变化。另外,与通过随时间调整以匹配通电时的操作温度的单个值集初始化偏置信号相比,当数据存储装置首先通电时,此实施例可以更佳地优化精细致动器偏置信号的初始值集。
41.在例如图10中所示的一个实施例中,数据存储装置可以包括具有在对应的顶部和底部磁盘表面161
‑
164上致动的至少一个磁头的多个磁盘,其中控制电路系统24可以对两个或多于两个磁盘表面执行同时存取操作。在一个实施例中,控制电路系统24可以对相同磁盘的顶部和底部磁盘表面执行同时存取操作,并且在另一个实施例中,控制电路系统24可以对不同磁盘的磁盘表面执行同时存取操作。在一个实施例中,可以对至少两个磁盘表面(例如,顶部表面和底部表面)的伺服扇区进行组伺服写入,以提高跨越磁盘表面的伺服扇区和伺服磁道的一致性。在又另一实施例中,可以基于同时存取哪些磁盘表面,即基于对
应读取元件的径向偏移来调整精细致动器偏置信号。
42.图14是根据实施例的流程图,其中测量第一和第二磁头的偏移(框94),基于第一磁盘表面的伺服扇区在第一磁盘表面上限定第一数据磁道(框96),并且基于第二磁盘表面的伺服扇区和所测量偏移在第二磁盘表面上限定第二数据磁道(框98)。图11a示出实施例,其中顶部磁头包括第一写入元件421和第一读取元件441,并且底部磁头包括第二写入元件422和第二读取元件442。在一个实施例中,将伺服扇区组写入到顶部和底部磁盘表面以限定伺服磁道,例如,在顶部磁盘表面上的伺服磁道1001以及在底部磁盘表面上的伺服磁道1021。而且,在图11a的实例中,以与伺服磁道相同的径向密度限定数据磁道。
43.在一些实施例中,写入元件与读取元件之间的径向偏移可以在顶部磁头与底部磁头之间不同。另外,顶部磁头的写入/读取元件可以从底部磁头的写入/读取元件径向偏移。在图11a的实施例中,写入/读取元件之间的径向偏移对于顶部磁头和底部磁头相同,并且顶部磁头的写入/读取元件与底部磁头的写入/读取元件径向地对准。在图11b的实施例中,写入/读取元件之间的径向偏移对于顶部磁头和底部磁头相同,但是顶部磁头的写入/读取元件从底部磁头的写入/读取元件径向偏移。因此,在顶部和底部磁盘表面的组写入的伺服磁道,例如在顶部磁盘表面上的伺服磁道1001与在底部磁盘表面上的伺服磁道1021之间存在径向偏移。图11c示出实施例,其中顶部磁头的写入元件421与底部磁头的写入元件422径向地对准,从而产生径向对准的伺服磁道,但是顶部磁头的读取元件441从底部磁头的读取元件442径向偏移。图11d示出实施例,其中在写入/读取元件之间的径向偏移在顶部磁头与底部磁头之间不同,以及顶部磁头的写入/读取元件都从底部磁头的写入/读取元件径向偏移。
44.在图11a和图11b的实施例中,由于在同时地写入或读取数据磁道时精细致动器的中间位置是零(零偏置信号),因此顶部和底部磁盘表面的数据磁道限定为与伺服磁道径向对准。然而,在图11c(还以图12a放大示出)的实施例中,如果数据磁道与伺服磁道径向对准,则当从顶部和底部磁盘表面同时地读取数据磁道时(例如,当同时地读取数据磁道1041和1061时),精细致动器的偏置信号为非零,使得读取元件441保持居中于数据磁道1041上并且读取元件442保持居中于数据磁道1061上(也就是说,以补偿读取元件441与读取元件442之间的径向偏移)。当同时地写入顶部数据磁道1041和底部数据磁道1061时,精细致动器的偏置信号为零,因为顶部磁头的写入元件421与底部磁头的写入元件422径向对准。在图12b中所示的一个实施例中,基于底部磁盘表面上的伺服扇区以及在顶部磁头的读取元件441与底部磁头的读取元件442之间的径向偏移来限定底部磁盘表面上的数据磁道。例如,在一个实施例中,相对于底部磁盘表面上的伺服扇区限定数据磁道1061,以便从顶部磁盘表面上的数据磁道1041径向偏移,其中数据磁道的径向偏移是顶部读取元件与底部读取元件之间的径向偏移的一半。以此方式,当同时地写入或读取顶部和底部数据磁道时的精细致动器的偏置信号为非零,但是当将数据磁道对准到例如图12a中的伺服磁道时,所述偏置信号小于当同时地读取顶部和底部数据磁道时的非零偏置信号。通过将写入/读取操作两者的精细致动器的偏置偏移最小化(相较于具有用于读取操作的较大偏置偏移以及用于写入操作的零偏置偏移),在写入和读取操作中扩展偏置信号以补偿顶部磁头和底部磁头的读取元件之间的径向偏移会优化精细致动器的冲程。
45.图13a示出图11d的放大图,其中顶部磁头的写入/读取元件偏移不同于底部磁头
的写入/读取元件偏移,以及在顶部磁头与底部磁头之间存在两个写入/读取元件的径向偏移。如果顶部和底部磁盘表面的数据磁道与如图13a中所示的伺服磁道对准,则写入/读取元件偏移之间的差意味着在读取操作期间施加到精细致动器的偏置信号为非零(并且在写入操作期间为零,因为写入元件与伺服磁道对准)。为了在读取操作期间减小偏置信号的振幅,在一个实施例中,基于底部磁盘表面上的伺服扇区以及写入/读取元件偏移之间的差来限定底部磁盘表面的数据磁道。例如,在一个实施例中,相对于底部磁盘表面上的伺服扇区限定数据磁道1081,以便从顶部磁盘表面上的数据磁道1101径向偏移,其中数据磁道的径向偏移是顶部磁头和底部磁头的写入/读取元件偏移之间的差的一半。以此方式,当同时地写入或读取顶部和底部数据磁道时的精细致动器的偏置信号为非零,但是当将数据磁道对准到例如图13a中的伺服磁道时,所述偏置信号小于当同时地读取顶部和底部数据磁道时的非零偏置信号。
46.在一个实施例中,上述磁头的径向偏移可以是可忽略的,因此不需要通过调整顶部和底部磁盘表面之间的数据磁道的相对对准进行补偿。然而,在另一实施例中,上述磁头的径向偏移可能太大,使得在对应的顶部和底部数据磁道的同时存取操作期间可以阻止顶部和底部磁头的同时伺服。也就是说,读取元件的径向偏移可能超过精细致动器的冲程能力,使得可能无法在对应的顶部和底部数据磁道上同时伺服顶部和底部读取元件。在又另一实施例中,由于磁盘表面和/或致动元件的热膨胀,上述磁头的径向偏移可以随着操作温度增加而增加。如果读取元件的径向偏移增加超过精细致动器的冲程能力,则可能会阻止同时存取对应的顶部和底部数据磁道。因此,在一个实施例中,为了补偿顶部和底部磁头的读取元件之间的过多径向偏移,可以在两个阶段中执行同时存取操作。在第一阶段期间,通过写入/读取一个或多个数据磁道,顶部或底部磁头中的仅一个在单个存取间隔期间存取顶部或底部磁盘表面。当另一磁头的读取元件“跟上”存取操作时,随后在第二阶段期间,顶部和底部磁头两者在双存取间隔期间存取顶部和底部磁盘表面。
47.可以参考图15的流程图理解此实施例,其中为了执行多个连续数据磁道的同时存取操作(在顶部和底部磁盘表面上),首先在单存取间隔期间存取第一磁盘表面,而不存取第二磁盘表面(框112)。在单存取间隔之后,在双存取间隔期间同时存取第一和第二磁盘表面(框114)。
48.图16a示出图15的流程图的实例,其中执行对顶部数据磁道1161‑
1163和底部数据磁道1181‑
1183的写入操作。在此实施例中,顶部磁头的读取元件与底部磁头的读取元件之间的径向偏移超过精细致动器的冲程能力,由此在同时将数据写入到顶部数据磁道1161和对应的底部数据磁道1181时阻止两个磁头的伺服。因此,在写入操作的第一阶段期间,在如图16a中所示的单存取间隔期间首先将数据写入到底部数据磁道1181,而不将数据写入到顶部数据磁道1161。在写入底部数据磁道1181并通过单个数据磁道对两个磁头进行寻道之后,读取元件的偏移实现在如图16b中所示的双存取间隔期间同时写入顶部数据磁道1161和底部数据磁道1182。在写入顶部数据磁道1161和底部数据磁道1182并且随后通过一个数据磁道对磁头进行寻道之后,同时写入顶部数据磁道1162和底部数据磁道1183。在写入顶部数据磁道1162和底部数据磁道1183并且随后通过一个数据磁道对磁头进行寻道之后,在另一单存取间隔期间写入顶部数据磁道1163以完成写入操作。在一些实施例中,可以在写入操作的第一阶段期间写入多于一个数据磁道,以促进顶部和底部磁头的读取元件之间多于
一个数据磁道的径向偏移。
49.在一个实施例中,可以将在写入操作期间从主机接收的数据缓冲在易失性存储器(例如,dram或sram)或非易失性存储器(例如,闪存存储器)中,以便促进数据磁道的交错写入。也就是说,可以缓冲写入数据,使得逻辑块地址(lba)以连续的交错序列映射到顶部和底部连续数据磁道。参考图16a和16b的实例,在写入到底部数据磁道1181时,可以在写入操作的第一阶段期间缓冲顶部数据磁道1161的写入数据。在完成写入操作时,随后以fifo次序缓冲用于顶部磁盘表面的以下数据磁道中的每一个的写入数据,直到在写入最后一个顶部数据磁道1163时最终清空缓冲器为止。在另一实施例中,可以首先将写入数据的lba映射到在单存取模式期间写入的磁盘表面(图16a中的底部磁盘表面),然后将lba以交错方式映射到顶部和底部磁盘表面的两个数据磁道,接着将其余lba映射到在第二磁盘表面上写入的最后一个数据磁道(例如,在图16b中的数据磁道1163)。在此实施例中,不必缓冲写入数据以考虑交错写入。
50.图17a示出图15的流程图的实例,其中执行从顶部数据磁道1161‑
1163和底部数据磁道1181‑
1183的读取操作。在此实施例中,顶部磁头的读取元件与底部磁头的读取元件之间的径向偏移超过精细致动器的冲程能力,由此在同时从顶部数据磁道1161和对应的底部数据磁道1181读取数据时阻止两个磁头的伺服。因此,在读取操作的第一阶段期间,在如图17a中所示的单存取间隔期间首先从底部数据磁道1181读取数据,而不从顶部数据磁道1161读取数据。在读取底部数据磁道1181并通过单个数据磁道对两个磁头进行寻道之后,读取元件的偏移实现在如图17b中所示的双存取间隔期间同时读取顶部数据磁道1161和底部数据磁道1182。在读取顶部数据磁道1161和底部数据磁道1182并且随后通过一个数据磁道对磁头进行寻道之后,同时读取顶部数据磁道1162和底部数据磁道1183。在读取顶部数据磁道1162和底部数据磁道1183并且随后通过一个数据磁道对磁头进行寻道之后,在另一单存取间隔期间读取顶部数据磁道1163以完成读取操作。在一些实施例中,可以在写入操作的第一阶段期间读取多于一个数据磁道,以促进顶部和底部磁头的读取元件之间多于一个数据磁道的径向偏移。
51.在一个实施例中,可以将在读取操作的第一阶段期间从第一磁盘表面读取的数据缓冲在易失性存储器(例如,dram或sram)或非易失性存储器(例如,闪存存储器)中,以便促进数据磁道的交错读取。也就是说,在一个实施例中,逻辑块地址(lba)以连续的交错序列映射到顶部和底部连续数据磁道。参考图17a和17b的实例,可以在读取操作的第一阶段期间缓冲从底部数据磁道1181读取的数据。随后,在完成读取操作的同时,以fifo次序缓冲用于顶部磁盘表面的以下数据磁道中的每一个的读取数据,直到在读取最后一个顶部数据磁道1163时最终清空缓冲器为止。在此实施例中,缓冲交错的读取数据使数据能够以有序序列传递到主机。在另一实施例中,由于交错的读取操作,可以无序序列将从顶部和底部磁盘表面读取的数据传递到主机。此实施例避免了在读取操作的第一阶段期间缓冲读取数据的需要,因为lba可能被无序地传递到主机。
52.在上述另一实施例中,可以首先将写入数据的lba映射到在单存取模式期间写入的磁盘表面(图16a中的底部磁盘表面),然后将lba以交错方式映射到顶部和底部磁盘表面的两个数据磁道,接着将其余lba映射到在第二磁盘表面上写入的最后一个数据磁道(例如,在图16b中的数据磁道1163)。在此实施例中,不必缓冲读取数据以考虑交错读取,同时
仍使数据能够以有序序列传递到主机。
53.在上述实施例中,数据磁道的径向密度可以与伺服磁道的径向密度相同,其中数据磁道可以与伺服磁道径向对准或从伺服磁道径向偏移。在其它实施例中,数据磁道的径向密度可以与伺服磁道的径向密度不同,并且在另外其它实施例中,数据磁道的径向密度可以跨越每个磁盘表面变化。在一个实施例中,同时存取的磁盘表面(例如,顶部和底部磁盘表面)的径向密度跨越磁盘表面基本上相同。也就是说,第一磁盘表面上的数据磁道的径向密度的任何变化可以与第二磁盘表面(例如,顶部和底部磁盘表面)上的数据磁道的径向密度的相同变化相匹配。
54.在一个实施例中,可以使用叠瓦式磁记录(smr)写入数据磁道,其中以重叠方式连续地写入数据磁道。再次参考图2c,在一个实施例中,可以从磁盘表面的外径(od)朝向中径(md)以及从磁盘表面的内径(id)朝向md写入smr数据磁道。因此,在此实施例中,对第一和第二磁盘表面的交错写入/读取操作的次序取决于写入的方向(即,取决于哪一读取元件是前导读取元件)。也就是说,当从od朝向md写入时,第一磁头的读取元件可以是前导读取元件,然而当从id朝向md写入时,第二磁头的读取元件可以是前导读取元件。
55.可以采用任何合适的控制电路系统来实施以上实施例中的流程图,例如一个或多个任何合适的集成电路。例如,控制电路系统可以实施于读取通道集成电路内,或与读取通道分离的组件,例如数据存储控制器中,或上文所描述的某些操作可以由读取通道执行且其它操作由数据存储控制器执行。在一个实施例中,读取通道和数据存储控制器被实施为单独的集成电路,且在替代实施例中,它们被制造成单个集成电路或芯片上系统(soc)。另外,控制电路系统可以包含合适的功率大规模集成(plsi)电路,所述plsi电路实施为单独的集成电路、集成到读取通道或数据存储控制器电路中,或集成到soc中。
56.在一个实施例中,控制电路系统包括执行指令的微处理器,所述指令可操作以使微处理器执行本文中所描述的流程图。所述指令可以存储在任何计算机可读介质中。在一个实施例中,所述指令可以存储在微处理器外部的非易失性半导体存储器上,或与soc中的微处理器集成在一起。在另一实施例中,所述指令存储在磁盘上,且在磁盘驱动器通电时被读取到易失性半导体存储器中。在又另一实施例中,控制电路系统包括合适的逻辑电路,例如状态机电路。在一些实施例中,可以使用模拟电路(例如,模拟比较器、定时器等)实施流程图框中的至少一些,且在其它实施例中,可以使用数字电路或模拟/数字电路的组合实施所述框中的至少一些。
57.在各种实施例中,磁盘驱动器可以包含磁盘驱动器、包括非易失性半导体存储器的混合式磁盘驱动器等。另外,一些实施例可以包含包括如上文所描述的存储介质和/或控制电路系统的电子装置,例如计算装置、数据服务器装置、介质内容存储装置等。
58.上文描述的各种特征和过程可以独立于彼此使用,或可以以各种方式组合。所有可能组合和子组合预期落入本公开的范围内。另外,在一些实施方案中可以省略某些方法、事件、状态或过程块。本文描述的方法和过程还不限于任何特定序列,并且与其相关的块或状态可以其它适当的序列执行。例如,所描述的任务或事件可以以不同于具体公开的顺序来执行,或可以在单个块或状态中组合多个任务或事件。实例任务或事件可以串行、并行或以某一其它合适的方式执行。任务或事件可以添加到所公开的实例实施例或从其去除。本文中所描述的实例系统和组件可以与描述不同地配置。例如,元件可以添加到所公开的实
例实施例、从其去除或与其相比重新布置。
59.虽然已描述某些实施例,但这些实施例仅借助于实例呈现且并不意欲限制本文所公开的发明的范围。因此,在前述描述中无一者旨在暗示任何特定特征、特性、步骤、模块或块为必需或必不可少的。实际上,本文中所描述的新颖方法和系统可以多种其它形式体现;此外,可以在不脱离本文所公开的发明的精神的情况下对本文中所描述的方法和系统的形式进行各种省略、替代和改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。