1.本发明属于无人机中继和高可靠低延迟通信技术领域,涉及一种满足高可靠低延迟要求的无人机中继双向通信方法。
背景技术:
2.无人机(uav)辅助通信由于其部署灵活,信道条件良好等特点,在民用、军事领域都得到了广泛关注。在灾害发生,基站和道路被毁时,无人机依靠其部署灵活的特点,相比于地面基站,可以快速部署到位,同时还可以避开障碍物,获得更好的信道条件。另一方面,在灾害救援中使用到的各类救援机器人需要进行远程控制。救援机器人对反应速度,和动作的准确程度有着较高的要求,这也就对通信过程提出了低延迟和高可靠性的要求,而高可靠低时延通信(urllc)可以满足以上要求。文献[c.pan,h.ren,y.deng,m.elkashlan,and a.nallanathan,“jointblocklength and location optimization for urllc
‑
enabled uav relaysystems,”ieee commun.lett.,vol.23,no.3,pp.498
–
501,mar.2019.]
[0003]
]将urllc与无人机中继相结合,在给定的延迟限制之下,优化无人机的位置和码长,有效降低系统误码率,但是其中只考虑到地面基站向救援机器人发送控制信息,救援机器人无法向地面中继发送任何信息。
[0004]
为实现urllc的低延迟需求,传输信息的码长不能过长,这会对通信的效率造成影响,所以仅在传输控制信息的正向通信中满足urllc条件,在仅传输救援机器人采集的图像视频信息的返向通信中不需要满足urllc条件,而是对其通信速率进行最大化以获得更高清的图像视频信息。
技术实现要素:
[0005]
针对现有技术存在的问题,本发明提供一种满足高可靠低时延(urllc)条件的无人机中继双向通信方法。在地面基站和前方救援机器人因为障碍物无法直接通信时,通过无人机中继,本发明在实现通信的同时也能够满足救援机器人对于低通信时延和低误码率的要求,为无人机中继网络的设计提供技术参考。
[0006]
为了达到上述目的,本发明采用的技术方案为:
[0007]
一种满足高可靠低时延条件的无人机中继双向通信方法,该方法基于地面基站、无人机中继、救援机器人实现。首先,地面基站向无人机中继发送对救援机器人的控制指令;其次,无人机中继向救援机器人转发控制指令;再次,救援机器人接收到控制指令,完成指定动作并采集图像视频信息,并将其发送给无人机中继;最后,无人机中继向地面基站转发救援机器人采集到的视频图像信息。从地面基站通过无人机中继向救援机器人发送指令的通信过程称为正向通信,从救援机器人通过无人机中继发送采集到的信息的通信过程称为返向通信。具体包括以下步骤:
[0008]
步骤1:从某段时间t开始,将这段时间分为任意长度的两个阶段,分别表示为τ1和τ2。
[0009]
步骤2:在第一阶段τ1,地面基站向无人机中继发送控制信息,同时无人机中继返向通信,向地面基站传输前方救援机器人采集到的视频图像数据。本阶段中正向和反向两个方向的通信同时进行,分别占用一部分带宽,即w1 w4≤w,其中,w1表示地面基站向无人机中继发送控制信息的带宽,w4表示无人机中继向地面基站发送图像视频信息的带宽,w表示通信总带宽限制。其中正向通信需要满足urllc条件。
[0010]
步骤3:在第二阶段τ2,无人机中继向救援机器人发送控制信息,同时救援机器人向无人机中继传输采集到的视频图像数据。本阶段中两个方向的通信也是同时进行,即w2 w3≤w,其中w2表示从无人机中继向救援机器人发送控制信息所占用的带宽,w3表示救援机器人向无人机中继发送采集到的图像视频信息所占用的带宽。其中正向通信需要满足urllc条件,正向通信两个阶段的urllc条件分别为:
[0011][0012]
其中,τ1和τ2分别为正向通信两个阶段的通信时间;w1和w2分别为正向通信两个阶段的带宽;γ1和γ2分别是正向通信两个阶段的信噪比;
[0013][0014]
其中,h1是地面基站到无人机中继的信道增益,h2是无人机中继到机器人的信道增益:
[0015][0016]
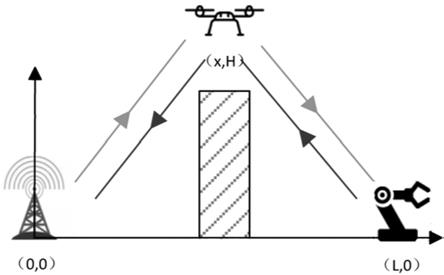
其中,β0是发送节点到接收节点距离为1米时的信道增益,h是无人机的飞行高度,x是无人机到地面基站的水平距离,l是机器人到地面基站的水平距离。
[0017]
v1和v2分别是正向通信两个阶段的信道参数;
[0018][0019]
q
‑1为标准正态分布的右尾函数的反函数;
[0020]
∈1和∈2分别是正向通信两个阶段的误码率,而总误码率为
[0021]
ε=1
‑
(1
‑
ε1)(1
‑
ε2)=ε1 ε2‑
ε1ε2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0022]
由于在urllc条件中,误码率较低,总误码率可以近似记为
[0023]
ε≈ε1 ε2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0024]
c0表示urllc条件中的最低吞吐量要求。
[0025]
此时由救援机器人采集的图像视频信息已经传输回地面基站,系统对于救援机器人返回信息的吞吐量r0可以记为:
[0026][0027]
其中,γ3和γ4分别是返向通信两个阶段的信噪比:
[0028][0029]
为了能够使救援机器人采集到的图像视频信息传输速率最大,应该在通信系统资源有限的情况下尽可能多的为其分配通信资源。因此将返向通信的通信速率最为优化目标,在满足总带宽,总通信时间和正向通信的urllc条件下最大化返向通信速率。由此整体的优化问题可以记为:
[0030][0031]
步骤4:返回步骤1,继续下一时段的通信任务。
[0032]
与现有技术相比,本发明的有益效果为:无人机中继通信系统可以在urllc条件下向救援机器人传输控制信息的同时,合理分配通信资源,保证救援机器人采集到的图像视频信息能够以尽可能大的速率回传到地面基站。
附图说明
[0033]
图1为满足urllc条件的无人机中继双向通信网络示意图;
[0034]
图2为本发明中正向通信与返向通信中,通信时间分配示意图;
[0035]
图3为本发明中平均通信速率随总通信时间和误码率要求变化比较;
[0036]
图4为本发明中平均通信速率随urllc中速率要求和总通信时间变化比较;
[0037]
图5为本发明中平均通信速率随无人机中继功率和总通信时间变化比较。
具体实施方式
[0038]
为了更好的理解,下面将结合附图和具体的实施例,详细说明本发明。
[0039]
在一个使用无人机进行中继的双向通信网络中,地面基站与救援机器人的距离为2000米,负责中继的无人机飞行高度为300米,地面基站与救援机器人的发射功率均为500mw,无人机中继的发射功率为200mw。噪声功率谱密度n0=
‑
169dbm/hz,载波频率f=5ghz。将无人机的初始位置设在地面基站与救援机器人的中间位置,带宽的初始值设为w1=w2=150khz,w3=w4=50khz。
[0040]
为保证低延迟,两个阶段的通信时间之和τ1 τ2应小于等于总通信时间限制τ。为保证控制救援机器人的动作准确迅速,正向通信的两个阶段都要满足urllc条件。为保证正向反向通信能够同时进行,每个阶段中两个方向通信占用的带宽之和应小于等于总带宽限制。为了保证救援机器人的控制和其采集到了信息能够有效传输回地面基站,对两个阶段的通信时间分配,同一阶段内两个方向通信的带宽分配和无人机的位置进行优化,实现返向通信吞吐量的最大化。
[0041]
首先第一阶段——地面基站与无人机中继通信,如图2所示,在正向通信时间τ1中,地面基站将控制信息发送给无人机中继,该过程需要满足urllc条件。同时在返向通信中,无人机中继将救援机器人返回的信息传输回地面基站,为后续的救援工作提供依据,该过程无须满足urllc条件。然后进入第二阶段——无人机中继与救援机器人通信阶段τ2。此时在正向信道中,无人机中继向救援机器人发送由地面基站发送的控制信息,该过程需要满足urllc条件。与此同时,在返向信道中,救援机器人将采集到的信息发送给无人机中继。
[0042]
如图3所示,在不同的urllc总误码率要求下,对返向通信中传输的信息平均速率进行比较,此时urllc对正向通信速率的要求为150bit/s。从实验结果可知,随着urllc总误码率要求的放宽,返向通信的平均速率的得到了提升,这是因为放宽urllc误码率要求时,为达到urllc最低吞吐量所需要得通信时间和带宽也有所下降,因此分配给返向通信的通信时间和带宽增加,返向通信的平均速率也就得到了提升;在相同的误码率条件下,随着总通信时间的提升,返向通信的平均速率也得到了提升。随着总通信时间的增加,两个阶段中返向通信的通信时间也得到了相应的增加,所以返向通信平均速率提高。图中的虚线代表仅对带宽分配进行优化的部分优化,在其他条件相同的情况下,对带宽分配,通信时间分配和无人机位置进行优化所能获得的返向通信平均速率大于仅对带宽进行优化的部分优化的返向通信平均速率。对带宽分配,通信时间分配和无人机位置进行优化都可以有效提升系统性能。
[0043]
基于以上设定,在图4中可以得到本方法中返向通信平均速率随urllc条件对通信速率要求的变化情况。在图4中,urllc对总误码率的要求设为10
‑5。随着urllc对于通信速率要求的提高,返向通信的平均速率下降。urllc条件中对于通信速率要求提高,会使正向通信占用的资源更多,留给返向通信的资源减少,所以返向通信平均速率下降。在图5中可以得到本方法返向通信平均速率随无人机中继的发射功率变化情况。此时误码率要求设为10
‑5,正向通信速率要求为150bit/s。随着无人机中继发射功率增大,返向通信的平均通信速率增大。
[0044]
以上所述实施例仅表达本发明的实施方式,但并不能因此而理解为对本发明专利的范围的限制,应当指出,对于本领域的技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
