1.本发明涉及物联网技术领域,特别涉及一种基于蓝牙技术的物联网应用系统。
背景技术:
2.目前,物联网(英文:internet of things,缩写:iot)起源于传媒领域,是信息科技产业的第三次革命。物联网是指通过信息传感设备,按约定的协议,将任何物体与网络相连接,实现物物互联。
3.现有对于运输车辆的管理都是只基于gps定位系统或北斗定位系统,实现了车辆位置的定位,无法获取车辆内人员或车载物品的信息的获取。
技术实现要素:
4.本发明目的之一在于提供了一种基于蓝牙技术的物联网应用系统,实现车辆及人员的信息的获取,实现远程确定运输中车辆的货物及人员的具体情况。
5.本发明实施例提供的一种基于蓝牙技术的物联网应用系统,包括:车载终端和物联网平台;车载终端与物联网平台通讯连接;
6.车载终端包括:
7.蓝牙通信模块,用于与设置在车辆上的数据采集终端通讯连接,用于获取数据采集终端采集车辆的状态数据;
8.处理器,与蓝牙通信模块电连接,
9.物联网通信模块,与处理器电连接,用于与物联网平台通信连接;
10.处理器通过蓝牙通信模块获取数据采集终端采集的车辆的状态数据,并通过物联网通信模块将状态数据发送至物联网平台。
11.优选的,数据采集终端包括:obd数据采集终端、温度数据采集终端、湿度数据采集终端、rfid读卡器、定位数据采集终端、第一图像采集终端其中一种或多种结合;
12.其中,obd数据采集终端,用于接入车辆的obd接口采集车辆的行车电脑内的车辆数据;
13.温度数据采集终端,用于采集车辆车厢内的温度数据;
14.湿度数据采集终端,用于采集车辆车厢内的湿度数据;
15.rfid读卡器,用于采集车辆车厢内的货物的rfid标签信息数据;
16.定位数据采集终端,用于与车载定位设备连接,用于获取车载定位设备的定位数据;
17.至少一个第一图像采集终端,设置在车辆的驾驶室内和/或车辆车厢内,用于采集驾驶室和/或车辆车厢内的第一图像数据。
18.优选的,基于蓝牙技术的物联网应用系统,还包括:
19.门锁控制器,与车载终端电连接,用于控制车辆车厢的门的门锁的开启与关闭;
20.门体状态检测模块,与车载终端电连接,用于检测门体的状态;
21.门体控制模块,与车载终端电连接,用于控制门体的开启;
22.第一提醒模块,设置在驾驶室内,与车载终端电连接;
23.车载终端执行如下操作:
24.解析通过obd数据采集终端采集的车辆数据;
25.当确定驾驶员启动车辆时,通过门体状态检测模块检测门体的状态;当检测的状态为开启时,通过第一提醒模块,提醒驾驶员;当检测的状态为闭合时,不提醒;
26.当确定驾驶员停止车辆时,通过rfid读卡器读取工作人员的rfid识别卡的身份信息并对rfid识别卡位置进行定位;
27.当定位出的位置位于门体后的预设的区域内时,控制门锁控制器和门体控制模块动作,使门体打开;
28.对rfid识别卡的位置进行追踪,基于追踪的位置信息确定工作人员的工作是否结束;当工作人员的工作结束时,控制门锁控制器和门体控制模块动作,使门体关闭。
29.优选的,基于蓝牙技术的物联网应用系统,还包括:
30.第二图像采集终端,设置在车辆车厢位于门体上方位置,与车载终端电连接,用于拍摄门体前方区域的第二图像数据;
31.车载终端执行如下操作:
32.解析通过第二图像采集终端拍摄的第二图像数据,确定门体前方区域内人员的第一数量;
33.解析通过rfid读卡器的身份信息,确定工作人员的第二数量;
34.当第一数量与第二数量相等且工作人员的定位的位置在预设的区域时,控制门锁控制器和门体控制模块动作,使门体打开;否则,不打开。
35.优选的,基于蓝牙技术的物联网应用系统,车载终端对rfid识别卡的位置进行追踪,基于追踪的位置信息确定工作人员的工作是否结束,具体包括如下步骤:
36.当从车辆上将货物卸下时,获取位于门体的下货位置的第一区域和预设的货物下车堆放的第二区域;
37.对rfid识别卡的位置进行追踪采样,获取多个采样位置;
38.确定采样位置至第一区域的第一中心点的第一距离和采样位置至第二区域的第二中心点的第二距离之和与第一中心点至第二中心点的第三距离的差值,当差值在预设的阈值范围外时,确定工作人员的工作结束;
39.当差值在预设的阈值范围时,基于相邻两个采样位置确定多个行动向量;行动向量为前一个采样位置为起点指向后一个采样位置;
40.基于第一区域和第二区域,确定多个判断向量;判断向量为以第一区域内的位置点为起点指向第二区域内的位置点或第二区域内的位置点指向第一区域内的位置点;
41.基于判断向量对行动向量进行筛选,确定符合第一区域与第二区域之间运动趋势的行动向量;
42.获取符合第一区域与第二区域之间运动趋势的行动向量的数量对于行动向量的总数的占比是否达到预设的第一占比阈值;当小于第一占比阈值时,确定工作人员的工作结束;
43.和/或,
44.当采样向量中零向量的占比大于预设的第二占比阈值时,确定工作人员的工作结束;
45.其中,基于判断向量对行动向量进行筛选,确定符合第一区域与第二区域之间运动趋势的行动向量,包括:
46.基于向量余弦夹角公式确定行动向量与每个判断向量的夹角;当存在夹角小于等于预设的夹角阈值时,确定行动向量符合第一区域与第二区域之间运动趋势。
47.优选的,基于蓝牙技术的物联网应用系统,还包括:
48.压力传感器阵列,阵列设置在车辆车厢的门体的内侧面,用于检测门体内侧面受到的压力;
49.第二提醒模块,设置在车辆车厢的门体的外侧面,与车载终端电连接;
50.车载终端执行如下操作:
51.通过第一图像采集终端采集车辆车厢内的第一图像数据;
52.解析第一图像数据,确定门体内侧的货物堆放情况;
53.当货物最边缘未倚靠门体内侧面时,通过第二提醒模块输出车厢内货物状态正常的第一提醒信息;
54.当货物最边缘依靠至门体内侧面时,通过压力传感器阵列检测门体内侧面受到的压力;
55.基于第一图像数据和压力传感器阵列检测的门体内侧面受到的压力,预测门体打开时货物的状态;
56.通过货物的状态,确定当门体打开后货物是否存在倾倒的风险时,以及存在倾倒风险时确定应对策略;
57.通过第二提醒模块输出代表车辆车厢内的货物存在倾倒风险的第二提醒信息并输出应对策略。
58.优选的,解析第一图像数据,确定门体内侧的货物堆放情况;包括:
59.获取预设的车厢三维空间模型图;
60.基于第一图像数据,确定货物模型图;
61.将货物模型图映射至车厢三维空间模型图中,确定货物模型图与车厢三维空间模型图中的门体内侧的位置关系;
62.基于货物模型图和位置关系,查询预设的货物堆放判断表确定货物堆放情况;其中,货物堆放判断表中货物模型图、位置关系与货物堆放情况一一对应。
63.优选的,基于第一图像数据和压力传感器阵列检测的门体内侧面受到的压力,预测门体打开时货物的状态,包括:
64.基于第一图像数据和压力传感器阵列检测的门体内侧面受到的压力,构建预测向量;
65.获取预设的预测库,预测库包括状态向量与货物的状态一一对应;
66.计算预测向量与预测库中每个状态向量之间的相似度,相似度计算公式如下:
67.68.其中,m
j
为预测向量与预测库中第j个状态向量之间的相似度;x
i
为预测向量的第i个参数值;y
i,j
为预测库中第j个状态向量的第i个参数值;n为预测向量的维度或状态向量的维度;
69.获取相似度最大的状态向量对应的货物的状态作为预测的门体打开时货物的状态;
70.其中,货物的状态包括:倾倒几率、倾倒时的冲力以及倾倒的方向其中一项或多项结合。
71.优选的,通过货物的状态,确定当门体打开后货物是否存在倾倒的风险时,以及存在倾倒风险时确定应对策略,包括:
72.当下落几率大于预设的几率阈值时,确定货物存在倾倒风险;
73.基于倾倒时的冲力和倾倒的方向,查询预设的应对策略表,获取应对策略;应对策略表中倾倒时的冲力、倾倒的方向与应对策略一一对应。
74.优选的,基于蓝牙技术的物联网应用系统,还包括:
75.第一rfid标签,设置在车辆运输的卸货位置,用于标识用于卸货的第二区域的位置;第一rfid标签中存储有第二区域的参数信息;
76.第二rfid标签,设置在车辆运输的上货位置,用于标识用于上货的第三区域的位置,第二rfid标签中存储有第三区域的参数信息;
77.至少一个第三rfid标签,设置在车辆运输的途中的预设的位置点,用于标识车辆运输过程的位置点,第三rfid标签中存储有车辆运输过程中的位置点的参数信息;
78.车载终端执行如下操作:
79.当通过rfid读卡器读取到第一rfid标签或第二rfid标签时,才通过门锁控制器和门体控制模块控制车辆车厢的门体的开启或关闭;
80.当读取到第一rfid标签、第二rfid标签或第三rfid标签内的参数信息时,基于参数信息对通过定位数据采集终端获取的定位数据的进行修正,并向车载定位设备发送修正数据。
81.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
82.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
83.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
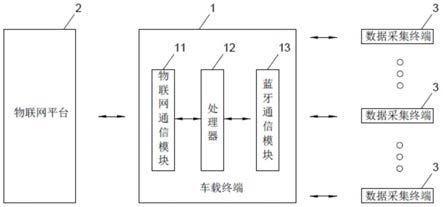
84.图1为本发明实施例中一种基于蓝牙技术的物联网应用系统的示意图。
具体实施方式
85.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
86.本发明实施例提供了一种基于蓝牙技术的物联网应用系统,如图1所示,包括:车
载终端1和物联网平台2;车载终端1与物联网平台2通讯连接;
87.车载终端1包括:
88.蓝牙通信模块13,用于与设置在车辆上的数据采集终端3通讯连接,用于获取数据采集终端3采集车辆的状态数据;
89.处理器12,与蓝牙通信模块13电连接,
90.物联网通信模块11,与处理器12电连接,用于与物联网平台2通信连接;
91.处理器12通过蓝牙通信模块13获取数据采集终端3采集的车辆的状态数据,并通过物联网通信模块11将状态数据发送至物联网平台2。
92.上述技术方案的工作原理及有益效果为:
93.在车辆上设置车载终端1,车载终端1基于蓝牙通信模块13与车辆上的设备进行通讯,获取设置在车辆上各个数据采集终端3所采集的数据;车载终端1基于物联网通信模块11与物联网平台2通讯,将从各个数据采集终端3所采集的数据发送至物联网平台2,用户只需登录物联网平台2即可实时获取车辆的实时状态数据,通过实时状态数据,确定车辆的状态;根据数据采集终端3的多样化的设置,不仅可以确定车辆的定位信息,还可以确定车辆自身的数据,例如运送冷冻食品时,车厢内的温湿度;货物在车厢内的状态、图像等;实现了全面掌控车辆运输过程中的各种状态,以实现对车辆运输的全面管理。
94.在一个实施例中,数据采集终端3包括:obd数据采集终端、温度数据采集终端、湿度数据采集终端、rfid读卡器、定位数据采集终端、第一图像采集终端其中一种或多种结合;
95.其中,obd数据采集终端,用于接入车辆的obd接口采集车辆的行车电脑内的车辆数据;
96.温度数据采集终端,用于采集车辆车厢内的温度数据;
97.湿度数据采集终端,用于采集车辆车厢内的湿度数据;
98.rfid读卡器,用于采集车辆车厢内的货物的rfid标签信息数据;
99.定位数据采集终端,用于与车载定位设备连接,用于获取车载定位设备的定位数据;
100.至少一个第一图像采集终端,设置在车辆的驾驶室内和/或车辆车厢内,用于采集驾驶室和/或车辆车厢内的第一图像数据。
101.上述技术方案的工作原理及有益效果为:
102.基于obd数据采集终端采集车辆的行车电脑内的车辆数据,车辆数据包括:车辆速度、油箱油量等;通过温度数据采集终端采集温度;通过湿度数据采集终端采集湿度;rfid读卡器主要是读取驾驶员佩戴的rfid身份卡、货物上的rfid标签,确定驾驶员的状态与货物的状态。定位数据采集终端采集定位数据,确定车辆的位置。第一图像采集终端可以为多个,分别设置在驾驶室内的图像和车厢内的图像;实现实时视频监控。
103.在一个实施例中,基于蓝牙技术的物联网应用系统,还包括:
104.门锁控制器,与车载终端1电连接,用于控制车辆车厢的门的门锁的开启与关闭;
105.门体状态检测模块,与车载终端1电连接,用于检测门体的状态;
106.门体控制模块,与车载终端1电连接,用于控制门体的开启;
107.第一提醒模块,设置在驾驶室内,与车载终端1电连接;
108.车载终端1执行如下操作:
109.解析通过obd数据采集终端3采集的车辆数据;
110.当确定驾驶员启动车辆时,通过门体状态检测模块检测门体的状态;当检测的状态为开启时,通过第一提醒模块,提醒驾驶员;当检测的状态为闭合时,不提醒;
111.当确定驾驶员停止车辆时,通过rfid读卡器读取工作人员的rfid识别卡的身份信息并对rfid识别卡位置进行定位;
112.当定位出的位置位于门体后的预设的区域内时,控制门锁控制器和门体控制模块动作,使门体打开;
113.对rfid识别卡的位置进行追踪,基于追踪的位置信息确定工作人员的工作是否结束;当工作人员的工作结束时,控制门锁控制器和门体控制模块动作,使门体关闭。
114.上述技术方案的工作原理及有益效果为:
115.通过门体状态检测模块检测门体的状态,主要是检测门体开启与否以及开启角度、速度等参数;门体控制模块,实现控制门体的开启速度和关闭速度。门锁控制器,控制门锁的开启与关闭;与门体控制模块相配合,实现车厢门体的开启与闭合。通过第一提醒模块在门体未关闭时驾驶员启动车辆时发出提醒;以避免上货或卸货过程中,车辆启动而造成工作人员的受伤。此外,还基于rfid定位技术,通过rfid读卡器与工作人员的rfid识别卡进行工作人员的位置确定,当工作人员在车后的预设区域就位时,准备对车辆进行上货或卸货操作;此时才控制门体开启,避免了车辆提起开启门后移动到上货或卸货位置,因意外造成人员的触碰的风险。通过rfid识别卡的位置追踪分析,确定工作人员是否工作结束,当结束时,控制门体关闭,实现智能关闭;无需驾驶员进行确定工作是否完成,提高智能化。
116.在一个实施例中,基于蓝牙技术的物联网应用系统,还包括:
117.第二图像采集终端,设置在车辆车厢位于门体上方位置,与车载终端1电连接,用于拍摄门体前方区域的第二图像数据;
118.车载终端1执行如下操作:
119.解析通过第二图像采集终端拍摄的第二图像数据,确定门体前方区域内人员的第一数量;
120.解析通过rfid读卡器的身份信息,确定工作人员的第二数量;
121.当第一数量与第二数量相等且工作人员的定位的位置在预设的区域时,控制门锁控制器和门体控制模块动作,使门体打开;否则,不打开。
122.上述技术方案的工作原理及有益效果为:
123.第二图像采集终端拍摄门体就位在门体后方预设区域内的工作人员图像,在rfid读卡器读卡识别的基础上再次对工作人员身份进行核实,以实现对上货或卸货时工作人员的身份的管控。
124.在一个实施例中,基于蓝牙技术的物联网应用系统,车载终端1对rfid识别卡的位置进行追踪,基于追踪的位置信息确定工作人员的工作是否结束,具体包括如下步骤:
125.当从车辆上将货物卸下时,获取位于门体的下货位置的第一区域和预设的货物下车堆放的第二区域;
126.对rfid识别卡的位置进行追踪采样,获取多个采样位置;
127.确定采样位置至第一区域的第一中心点的第一距离和采样位置至第二区域的第
二中心点的第二距离之和与第一中心点至第二中心点的第三距离的差值,当差值在预设的阈值范围外时,确定工作人员的工作结束;
128.当差值在预设的阈值范围时,基于相邻两个采样位置确定多个行动向量;行动向量为前一个采样位置为起点指向后一个采样位置;
129.基于第一区域和第二区域,确定多个判断向量;判断向量为以第一区域内的位置点为起点指向第二区域内的位置点或第二区域内的位置点指向第一区域内的位置点;
130.基于判断向量对行动向量进行筛选,确定符合第一区域与第二区域之间运动趋势的行动向量;
131.获取符合第一区域与第二区域之间运动趋势的行动向量的数量对于行动向量的总数的占比是否达到预设的第一占比阈值;当小于第一占比阈值时,确定工作人员的工作结束;
132.和/或,
133.当采样向量中零向量的占比大于预设的第二占比阈值时,确定工作人员的工作结束;
134.其中,基于判断向量对行动向量进行筛选,确定符合第一区域与第二区域之间运动趋势的行动向量,包括:
135.基于向量余弦夹角公式确定行动向量与每个判断向量的夹角;当存在夹角小于等于预设的夹角阈值时,确定行动向量符合第一区域与第二区域之间运动趋势。
136.上述技术方案的工作原理及有益效果为:
137.在卸货时,采用门体的下货位置的第一区域和货物下车堆放的第二区域,以及追踪采样的位置进行工作人员运动趋势的分析,当工作人员的运动趋势分析为往返于第一区域和第二区域时,可以认为工作未结束;当不是时,工作结束。在对追踪采样时,可以以预设时间段内每个一个预设的时间点进行采样,综合分析预设时间段内的各个采样位置。还可以以距离车辆车厢的距离的波动为基准分段进行采样,即工人从车厢近处往远处移动,当移动到最远端时为其中一个分段。当采样向量为零向量时,说明用户在原地未移动。更进一步地,还可以应用在上货的过程,即车辆上货时,通过上货的区域、货物堆放位置和工作人员的位置进行综合分析,分析工作是否完成。
138.在一个实施例中,基于蓝牙技术的物联网应用系统,还包括:
139.压力传感器阵列,阵列设置在车辆车厢的门体的内侧面,用于检测门体内侧面受到的压力;
140.第二提醒模块,设置在车辆车厢的门体的外侧面,与车载终端1电连接;
141.车载终端1执行如下操作:
142.通过第一图像采集终端采集车辆车厢内的第一图像数据;
143.解析第一图像数据,确定门体内侧的货物堆放情况;
144.当货物最边缘未倚靠门体内侧面时,通过第二提醒模块输出车厢内货物状态正常的第一提醒信息;
145.当货物最边缘依靠至门体内侧面时,通过压力传感器阵列检测门体内侧面受到的压力;
146.基于第一图像数据和压力传感器阵列检测的门体内侧面受到的压力,预测门体打
开时货物的状态;
147.通过货物的状态,确定当门体打开后货物是否存在倾倒的风险时,以及存在倾倒风险时确定应对策略;
148.通过第二提醒模块输出代表车辆车厢内的货物存在倾倒风险的第二提醒信息并输出应对策略。
149.上述技术方案的工作原理及有益效果为:
150.通过第一图像采集终端和压力传感器阵列进行综合分析,当出现货物倚靠到门体内侧面时,该状态为危险状态,因为门体的阻挡货物未倾倒;当门体打开时,货物倾倒或对门体附近的工作人员以意外伤害。因此通过第二提醒模块,工作人员能及时知晓风险,并针对风险第二提醒模块给出应对策略,工作人员能够及时以合理的应对策略进行应对。其中,压力传感器阵列为阵列设置的多个压力传感器。
151.在一个实施例中,解析第一图像数据,确定门体内侧的货物堆放情况;包括:
152.获取预设的车厢三维空间模型图;
153.基于第一图像数据,确定货物模型图;
154.将货物模型图映射至车厢三维空间模型图中,确定货物模型图与车厢三维空间模型图中的门体内侧的位置关系;
155.基于货物模型图和位置关系,查询预设的货物堆放判断表确定货物堆放情况;其中,货物堆放判断表中货物模型图、位置关系与货物堆放情况一一对应。
156.上述技术方案的工作原理及有益效果为:
157.采用三维空间模型构建的方法,实现准确的货物堆放情况的确定;货物在车厢内的堆放情况不仅仅是货物本身的堆放还有货物的堆放是否靠近门体的内侧面。
158.在一个实施例中,基于第一图像数据和压力传感器阵列检测的门体内侧面受到的压力,预测门体打开时货物的状态,包括:
159.基于第一图像数据和压力传感器阵列检测的门体内侧面受到的压力,构建预测向量;
160.获取预设的预测库,预测库包括状态向量与货物的状态一一对应;
161.计算预测向量与预测库中每个状态向量之间的相似度,相似度计算公式如下:
[0162][0163]
其中,m
j
为预测向量与预测库中第j个状态向量之间的相似度;x
i
为预测向量的第i个参数值;y
i,j
为预测库中第j个状态向量的第i个参数值;n为预测向量的维度或状态向量的维度;
[0164]
获取相似度最大的状态向量对应的货物的状态作为预测的门体打开时货物的状态;
[0165]
其中,货物的状态包括:倾倒几率、倾倒时的冲力以及倾倒的方向其中一项或多项结合。
[0166]
上述技术方案的工作原理及有益效果为:
[0167]
基于事先设置的预测库,对开门后货物状态进行预测,预测出倾倒几率、倾倒时的
冲力以及倾倒的方向;以实现对应的策略的制定。其中,预测库是基于大量实验数据进行综合总结得到的。
[0168]
在一个实施例中,通过货物的状态,确定当门体打开后货物是否存在倾倒的风险时,以及存在倾倒风险时确定应对策略,包括:
[0169]
当下落几率大于预设的几率阈值时,确定货物存在倾倒风险;
[0170]
基于倾倒时的冲力和倾倒的方向,查询预设的应对策略表,获取应对策略;应对策略表中倾倒时的冲力、倾倒的方向与应对策略一一对应。
[0171]
上述技术方案的工作原理及有益效果为:
[0172]
通过应对策略表确定相应的应对策略,实现了快速确定最佳应对策略;例如:当预测的冲力小时,可以采用工作人员就位,门体开启一个缝隙,由人员将托起工具伸入抵住的策略,防止货物倾倒。当预测的冲力较大时,需要采用专门的液压抵住器械进行操作,同时避免人员站在倾倒区域,防止人员伤害风险。
[0173]
在一个实施例中,基于蓝牙技术的物联网应用系统,还包括:
[0174]
第一rfid标签,设置在车辆运输的卸货位置,用于标识用于卸货的第二区域的位置;第一rfid标签中存储有第二区域的参数信息;
[0175]
第二rfid标签,设置在车辆运输的上货位置,用于标识用于上货的第三区域的位置,第二rfid标签中存储有第三区域的参数信息;
[0176]
至少一个第三rfid标签,设置在车辆运输的途中的预设的位置点,用于标识车辆运输过程的位置点,第三rfid标签中存储有车辆运输过程中的位置点的参数信息;
[0177]
车载终端1执行如下操作:
[0178]
当通过rfid读卡器读取到第一rfid标签或第二rfid标签时,才通过门锁控制器和门体控制模块控制车辆车厢的门体的开启或关闭;
[0179]
当读取到第一rfid标签、第二rfid标签或第三rfid标签内的参数信息时,基于参数信息对通过定位数据采集终端获取的定位数据的进行修正,并向车载定位设备发送修正数据。
[0180]
上述技术方案的工作原理及有益效果为:
[0181]
通过第一rfid标签、第二rfid标签和第三rfid标签的设置,实现了车辆上货位置、卸货位置及途中预设位置点的确定;实现对定位数据的补充修正,提高车辆位置确定的准确度;并且防止车载定位设备故障而造成的定位错误,影响物联网平台2对车辆的管控。
[0182]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
