1.本发明涉及智能交通技术领域,尤其涉及一种行飞设备交通事故监控系统及行飞设备。
背景技术:
2.随着科技的飞速发展,机动车辆的数量迅速增加,道路车流量也急剧增加,道路交通管理面临巨大的交通安全压力,且各种交通违法行为日益严重。如何缓解目前的交通压力,提高管理水平,越来越成为人们关注的焦点。有关部门虽然已经做了大量的尝试工作,但结果都不是很理想,纠其原因就是缺少一个高效的行飞设备交通事故监控系统,可以准确确定事故发生事件,并即时通知交通管理部门进行处理。
技术实现要素:
3.本发明在于提供一种行飞设备交通事故监控系统、行飞设备,可以准确确定事故发生事件,并即时通知交通管理部门进行处理。
4.第一方面,本发明实施例提供了一种行飞设备交通事故监控系统,所述监控系统包括:
5.行飞设备子机,用于接收震动数据及行飞设备间或行飞设备与发生碰撞物体间的距离数据及位置信息数据;根据所述震动数据及行飞设备间或行飞设备与发生碰撞物体间的距离数据确定事故报警显示,并同时传输给控制中心处理;
6.传输模块,用于数据信息的传输;
7.控制中心,用于接收所述行飞设备子机发出的数据并进行分析处理。
8.可选地,所述行飞设备子机包括:
9.gps模块,用以获取行飞设备的位置信息数据;
10.数字震动传感模块,其配置于预设位置,用以获取震动数据;
11.量子测距模块,其配置于预设位置,用以通过量子雷达扫瞄得到行飞设备间或行飞设备与发生碰撞物体间的第一距离数据;
12.红外测距模块,其配置于预设位置,用于多方向、多角度的探测行飞设备之间或行飞设备与发生碰撞物体间的第二距离数据;
13.分析模块,用于分析确定事故的发生。
14.可选地,所述数字震动传感模块由n位a/d转换结合震动强度变换构成,震动强度通过n位a/d转换器结合db转换器进行分析,震动脉冲经预放大器后送到n位a/d转换器,如果锁定信号为逻辑高,n位a/d转换器的转换结果由db转换器进行处理,其中,震动强度的幅值db在预设范围内表示满足第一条件,a/d转换器的结果存储在n位寄存器内并送到dsp总线传输给分析模块。
15.可选地,所述量子测距模块包括:
16.激光源,用于产生光信号;
17.衰减器,用于将所述光信号衰减成单光子信号;
18.量子光栅,用于将所述单光子信号转变为几率波干涉条纹信号;
19.分光器,用于将所述几率波干涉条纹信号分为第一干涉波和第二干涉波两部分;第一干涉波射向目标,第二干涉波用于感应第一干涉波遇到目标时引起的几率干涉波的相位偏移;
20.信号发射镜,用于将所述第一干涉波射向待测区域;
21.单光子检测器,利用超导的超导态随着库珀对破坏而转变为普通电阻状态,根据第二干涉波输出电压信号;
22.目标判断模块,用于根据所述电压信号计算出待测区域中目标的位置;并发送至所述分析模块;
23.光纤放大器,用于将所述单光子检测器的透射光放大恢复后反馈至所述量子光栅的输入端;
24.所述量子光栅将光纤放大器放大恢复后的透射光传入分光器。
25.可选地,所述控制中心包括主控中心、报警系统和数据库。
26.可选地,所述主控中心的数据库中存储行飞设备的识别码对应的信息并进行分析处理,通过报警系统进行提示,并将信息反馈到分控中心进行警示。
27.可选地,所述分控中心将所述震动数据及行飞设备间或行飞设备与发生碰撞物体间的距离数据及位置信息数据及数据的上报时间与所述行飞设备的识别码绑定,构建行飞设备碰撞场景数据。
28.可选地,所述无线传输模块为gprs或gsm通信网络。
29.第二方面,本发明实施例提供了一种行飞设备,所述行飞设备包括上述的行飞设备子机;
30.所述行飞设备子机还包括:影像记录模块,用于记录所述行飞设备行驶全过程的视频图像和声音。
31.有益效果
32.本发明提出了一种行飞设备交通事故监控系统、行飞设备,所述行飞设备交通事故监控系统包括行飞设备子机,用于接收震动数据及行飞设备间或行飞设备与发生碰撞物体间的距离数据及位置信息数据;根据所述震动数据及行飞设备间或行飞设备与发生碰撞物体间的距离数据确定事故报警显示,并同时传输给控制中心处理;传输模块,用于数据信息的传输;控制中心,用于接收所述行飞设备子机发出的数据并进行分析处理,可以准确确定事故发生事件,并即时通知交通管理部门进行处理。
附图说明
33.为了更清楚地说明本说明书一个或多个实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本说明书中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
34.图1为本发明实施例的一种行飞设备交通事故监控系统的结构示意图;
35.图2为本发明实施例的一种行飞设备子机的结构示意图;
36.图3为图2实施例的数字震动传感模块的结构示意图;
37.图4为本发明一种实施例的量子测距模块的结构示意图;
38.图5为本发明一种实施例的控制中心的结构示意图。
具体实施方式
39.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.下面结合附图说明和具体实施例对本发明作进一步描述:
41.图1示出了本发明实施例的一种行飞设备交通事故监控系统的结构示意图,如图1所示,所述监控系统包括:
42.行飞设备子机10,用于接收震动数据及行飞设备间或行飞设备与发生碰撞物体间的距离数据及位置信息数据;根据所述震动数据及行飞设备间或行飞设备与发生碰撞物体间的距离数据确定事故报警显示,并同时传输给控制中心;
43.传输模块20,用于数据信息的传输;
44.控制中心30,用于接收所述行飞设备子机发出的数据并进行分析处理。
45.本实施例提出了一种行飞设备交通事故监控系统,所述行飞设备交通事故监控系统包括行飞设备子机,行飞设备子机接收震动数据及行飞设备间或行飞设备与发生碰撞物体间的距离数据及位置信息数据;根据所述震动数据及行飞设备间或行飞设备与发生碰撞物体间的距离数据确定事故报警显示,并同时传输给控制中心处理;控制中心接收所述行飞设备子机发出的数据并进行分析处理,可以准确确定事故发生事件,并即时通知交通管理部门进行处理。
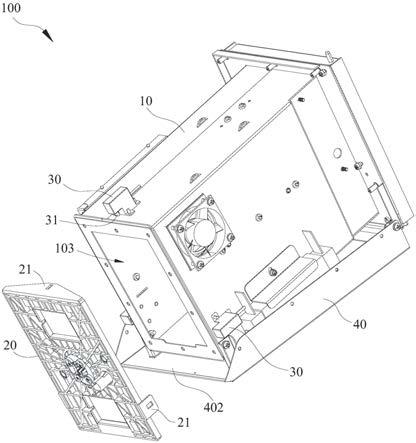
46.具体地,如图2所示,所述行飞设备子机10包括:
47.gps模块101,用以获取行飞设备的位置信息数据;
48.数字震动传感模块102,其配置于预设位置,用以获取震动数据;
49.量子测距模块103,其配置于预设位置,用以通过量子雷达扫瞄得到行飞设备间或行飞设备与发生碰撞物体间的第一距离数据;
50.红外测距模块104,其配置于预设位置,用于多方向、多角度的探测行飞设备之间或行飞设备与发生碰撞物体间的第二距离数据;
51.分析模块105,基于所述震动数据、第一距离数据及所述第二距离数据确定事故是否发生。
52.上述行飞设备例如可以为飞机、车辆及轮船等等,所述行飞设备子机并不限于上种形式,例如可以包括摄像机、速度传感器、重量传感器或者用于检测行飞设备的识别码(例如,车牌号)的模块或用于测定或处理现代车辆的任意信号源(例如wlan、gsm系统、蓝牙发送器(mac等)、胎压传感器)的定位信号的模块。数据的传输例如可以通过移动无线连接而无线地传输到控制中心。
53.在一种实施例中,可以通过将适合的数据传输模块整合到行飞设备子机中,在行飞设备的一个行飞设备子机和另一个行飞设备之间的行飞设备之间可以交换信息。在此,
行飞设备子机例如可以通过车对车通信或分控中心对车通信;通过使用此类的行飞设备子机,一方面可以改进交通监控与交通参与者之间的通信;另一方面可以由此提高交通安全性。
54.具体地,如图3所示,所述数字震动传感模块由n位a/d转换结合震动强度变换构成,震动强度通过n位a/d转换器结合db转换器(震动强度转换器)进行分析,震动脉冲经预放大器后送到n位a/d转换器,如果锁定信号为逻辑高,n位a/d转换器的转换结果由db转换器进行处理,其中,震动强度的幅值db在预设范围内表示满足第一条件,a/d转换器的结果存储在n位寄存器内并送到dsp总线传输给分析模块,分析模块根据所述震动数据及行飞设备间的行飞设备间或行飞设备与发生碰撞物体间的距离数据分析确定事故的发生。
55.具体地,如图4所示,所述量子测距模块103包括:
56.激光源1031,用于产生光信号;
57.衰减器1032,用于将所述光信号衰减成单光子信号;
58.量子光栅1033,用于将所述单光子信号转变为几率波干涉条纹信号;
59.分光器1034,用于将所述几率波干涉条纹信号分为第一干涉波和第二干涉波两部分;第一干涉波射向目标,第二干涉波用于感应第一干涉波遇到目标时引起的几率干涉波的相位偏移;
60.信号发射镜1035,用于将所述第一干涉波射向待测区域;
61.单光子检测器1036,利用超导的超导态随着库珀对破坏而转变为普通电阻状态,根据第二干涉波输出电压信号;
62.目标判断模块1037,用于根据所述电压信号计算出待测区域中目标的位置;并将目标的位置数据发送至所述分析模块105;分析模块105根据所述震动数据及行飞设备间或行飞设备与发生碰撞物体间的距离数据(包括第一距离数据及第二距离数据)分析确定事故的发生;
63.光纤放大器1038,用于将所述单光子检测器的透射光放大恢复后反馈至所述量子光栅的输入端;
64.所述量子光栅1033将光纤放大器1038放大恢复后的透射光传入分光器1034。
65.所述量子测距模块103的激光源1031产生的光信号经衰减器1032衰减成为单光子信号,单光子信号经量子光栅1033获得几率波干涉信号,所述几率波干涉信号中的一部分几率波经过分光器1038送入信号发射镜射向目标;另一部分几率波送入单光子检测器1036,单光子检测栅格处干光子透射状态,透射的光子被送入光纤放大器1038进行放大,再送入量子光栅1033;当有目标出现时,则会引起量子干涉条纹在单光子检测栅格上的移动,从而引起单光子检测器1036有信号电压输出,这个电压输出信号送入目标判断单元1037进行计算目标位置,如果震动强度的幅值db在预设范围内表示满足第一条件,电压输出信号满足第二预设条件,则发送至分析模块105,分析模块105根据所述震动数据及行飞设备间或行飞设备与发生碰撞物体间的距离数据(包括第一距离数据及第二距离数据)分析确定事故的发生;进一步地,通过传输模块20发送至主控中心进行处理。
66.具体地,红外测距模块104可配置于行飞设备的多个位置,用于多方向、多角度的探测行飞设备之间或行飞设备与发生碰撞物体间的第二距离数据;红外测距模块104可以为红外传感器,搜索红外目标,确定其空间位置并对它的运动数据进行跟踪,分析模块105
根据所述震动数据及行飞设备间的行飞设备间或行飞设备与发生碰撞物体间的距离数据(包括第一距离数据及第二距离数据)分析确定事故的发生,可以准确确定事故发生事件,并即时通知交通管理部门进行处理。
67.具体地,如图5所示,所述控制中心30包括主控中心301、报警系统和数据库。所述主控中心的数据库中存储行飞设备的识别码对应的信息并进行分析处理,通过报警系统进行提示,并将信息反馈到分控中心进行警示。识别码可用于车牌读取,颜色读取、也可以对该型号的车辆信息进行互联网大数据采集,使车辆识别度增强,例如,识别的xx品牌的一种车型,根据网络上的大数据情况直接提取车辆信息,包括车辆的安全性能配置、限速、车重、排量等,确定该车辆是否在安全行驶范围内,便于提醒车主注意。
68.具体地,所述分控中心将所述震动数据及行飞设备间或行飞设备与发生碰撞物体间的距离数据及位置信息数据及数据的上报时间与所述行飞设备的识别码绑定,构建行飞设备碰撞场景数据。
69.优选的,所述无线传输模块为gprs或gsm通信网络。
70.基于同一发明构思,本发明实施例提供了一种行飞设备,所述行飞设备包括上述的行飞设备子机。
71.具体地,如图2所示,所述行飞设备子机10包括:
72.gps模块101,用以获取行飞设备的位置信息数据;
73.数字震动传感模块102,其配置于行飞设备的预设位置,用以获取震动数据;
74.量子测距模块103,其配置于预设位置,用以通过量子雷达扫瞄得到行飞设备间或行飞设备与发生碰撞物体间的第一距离数据;
75.红外测距模块104,其配置于预设位置,用于多方向、多角度的探测行飞设备之间或行飞设备与发生碰撞物体间的第二距离数据;
76.分析模块105,基于所述震动数据、第一距离数据及所述第二距离数据确定事故是否发生,分析模块105例如可以为soc(system on a chip)或mcu(microcontroller unit)等等。
77.行飞设备,例如可以为飞机车辆轮船等等,所述行飞设备子机并不限于上种形式,例如可以包括摄像机、速度传感器、重量传感器或者用于检测车辆的车牌的模块或用于测定或处理现代车辆的任意信号源(例如wlan、gsm系统、蓝牙发送器(mac等)、胎压传感器)的定位信号的模块。数据的传输例如可以通过移动无线连接而无线地传输到控制中心。
78.在一种实施例中,可以通过将适合的数据传输单元整合到行飞设备子机中,在行飞设备子机和另一个行飞设备之间可以交换信息。在此行飞设备子机例如可以通过车对车通信,通过使用此类的行飞设备子机,一方面可以改进交通监控与交通参与者之间的通信;另一方面可以由此提高交通安全性。
79.需要说明的是,所述行飞设备子机可以为多个,多个行飞设备子机沿行飞设备的四周分布设置,各个不同位置的行飞设备子机分别编号,进行实时监测和数据采集,及行飞设备间的状态显示。
80.具体地,如图3所示,所述数字震动传感模块由n位a/d转换结合震动强度变换构成,震动强度通过n位a/d转换器结合db转换器(震动强度转换器)进行分析,震动脉冲经预放大器后送到n位a/d转换器,如果锁定信号为逻辑高,n位a/d转换器的转换结果由db转换
器进行处理,其中,震动强度的幅值db在预设范围内表示满足第一条件,a/d转换器的结果存储在n位寄存器内并送到dsp总线传输给分析模块。
81.具体地,如图4所示,所述量子测距模块103包括:
82.激光源1031,用于产生光信号;
83.衰减器1032,用于将所述光信号衰减成单光子信号;
84.量子光栅1033,用于将所述单光子信号转变为几率波干涉条纹信号;
85.分光器1034,用于将所述几率波干涉条纹信号分为第一干涉波和第二干涉波两部分;第一干涉波射向目标,第二干涉波用于感应第一干涉波遇到目标时引起的几率干涉波的相位偏移;
86.信号发射镜1035,用于将所述第一干涉波射向待测区域;
87.单光子检测器1036,利用超导的超导态随着库珀对破坏而转变为普通电阻状态,根据第二干涉波输出电压信号;
88.目标判断模块1037,用于根据所述电压信号计算出待测区域中目标的位置;
89.光纤放大器1038,用于将所述单光子检测器的透射光放大恢复后反馈至所述量子光栅的输入端;
90.所述量子光栅1033将光纤放大器1038放大恢复后的透射光传入分光器1034。
91.所述量子测距模块103的激光源1031产生的光信号经衰减器1032衰减成为单光子信号,单光子信号经量子光栅1033获得几率波干涉信号,所述几率波干涉信号中的一部分几率波经过分光器1038送入信号发射镜射向目标;另一部分几率波送入单光子检测器1036,单光子检测栅格处干光子透射状态,透射的光子被送入光纤放大器1038进行放大,再送入量子光栅1033;当有目标出现时,则会引起量子干涉条纹在单光子检测栅格上的移动,从而引起单光子检测器1036有信号电压输出,该电压输出信号送入目标判断单元1037进行计算目标位置,并将目标位置数据信息发送至分析模块104。
92.具体地,如图5所示,所述控制中心30包括主控中心301、报警系统302和数据库303及分控中心304。所述主控中心30的数据库中303存储行飞设备的识别码对应的信息并进行分析处理,通过报警系统进行提示,并将信息反馈到分控中心进行警示。
93.具体地,所述分控中心将所述震动数据及行飞设备间或行飞设备与发生碰撞物体间的距离数据及位置信息数据及数据的上报时间与所述行飞设备的识别码绑定,构建行飞设备碰撞场景数据。
94.作为一种优选的实施方式,所述行飞设备子机还包括:影像记录模块,用于记录所述行飞设备行驶全过程的视频图像和声音。行飞设备子机安装在行飞设备内部,通过通信系统将采集的数据信息传输到控制中心,控制中心的数据库中存储行飞设备对应的用户信息、行驶路线等信息,发生事故时,通过报警装置进行提示,并将信息反馈到分控中心进行及时警示。所述行飞设备子机还可以通过接收并采集车辆发生碰撞时的应力、气压变化和声强变化数据,并将其发送给控制中心,能够辅助控制中心准确全面地确定发生碰撞的车辆、车辆碰撞的部位和车辆碰撞的原因及该原因的可信度。
95.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进
行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。