1.本技术涉及交通管理及安全技术领域,更具体的说,涉及一种避免拥堵的车辆智能接驳系统及门体结构。
背景技术:
2.近年来随着我国经济的发展和我们生活水平的提高,家长越来越重视孩子的安全,特别是在大城市,很多家长开私家车接送孩子上下学,由于上、下车需要短暂停车,一定程度上会造成校门口交通拥堵,带来交通压力。针对此问题,交管部门采取了即停即走、加大疏导等管理手段,但实际效果较为有限。学校周边道路交通较为混乱,甚至产生交通拥堵诱发交通事故,这种现象的出现原因较多,一方面是因为教育资源不均衡导致的学生跨区就读等社会原因,另一方面是因为大量私家车在学生上下学时段集中接送,挤占有限的道路资源,形成城市道路瓶颈路段,行车流线交织及车辆冲突较为严重,停车困难,对学校周边的道路交通产生较大影响,成为城市交通的一个难题。
技术实现要素:
3.有鉴于此,本技术实施例提供了一种避免拥堵的车辆智能接驳系统及门体结构,设置在学校门口,能够有效缓解学生接送导致的道路拥堵问题,提高接送效率和安全性。
4.为解决上述技术问题,本技术采用了如下技术方案:
5.一种避免拥堵的车辆智能接驳系统,包括主体1和多个运输箱5,主体1包括垂直通道v和水平通道h、所述水平通道h下方两侧设置有齿条2,所述垂直通道v四周均设置有齿条2;所述主体1设置有主体人员通道1.5;所述主体1还设置有车辆入口1.2和车辆出口1.3;车辆通过所述车辆入口驶入所述主体、通过所述车辆出口1.3驶离所述主体;
6.所述运输箱5为长方体结构,包括箱体5.2,所述运输箱5的8个角分别设置有电机齿轮5.1,所述电机齿轮5.1与所述齿条2配合,并能够在齿条2上进行水平和垂直运动;所述运输箱左右两侧分别设置有车辆通道,所述车辆驶入所述主体后,能够通过左侧的所述车辆通道驶入所述箱体5.2;所述车辆通过右侧的车辆通道驶离所述箱体5.2后,能够通过所述车辆出口1.3驶离所述主体;所述运输箱侧面设置有箱体人员通道,当所述运输箱运动到所述主体人员通道1.5处,所述箱体人员通道和主体人员通道至少部分重合,以便人员进出。
7.可选的,所述主体还包括纵向翻转墙体3和横向翻转墙体4;所述纵向翻转墙体3包括纵向翻转墙面3.2和设置在所述纵向翻转墙体3左右两侧的纵向墙体齿条3.1;所述纵向翻转墙体3翻转后,所述纵向墙体齿条3.1与所述主体的齿条2构成垂直通道v;
8.所述横向翻转墙体4包括横向翻转墙面4.2和设置在所述横向翻转墙体4上下两侧的横向墙体齿条4.1;所述横向翻转墙体4翻转后,所述横向墙体齿条4.1与所述主体的齿条2构成水平通道。
9.可选的,包括2个垂直通道和5个水平通道,其中两个所述水平通道位于地面下方;
所述车辆智能接驳系统包括位于右侧的5个纵向翻转墙体3,位于右侧的纵向翻转墙体3的右侧部与所述主体固定,位于右侧的纵向翻转墙体3能够沿着所述右侧部转动,使得位于右侧的纵向翻转墙体3的左侧部运动,直至构成垂直通道;
10.所述避免拥堵的车辆智能接驳系统还包括位于左侧的5个纵向翻转墙体3,位于左侧的纵向翻转墙体3的左侧部与所述主体固定,位于左侧的纵向翻转墙体3能够沿着所述左侧部转动,使得位于左侧的纵向翻转墙体3的右侧部运动,直至构成垂直通道。
11.可选的,包括位于左侧的4个横向翻转墙体4和位于右侧的4个横向翻转墙体4;所述横向翻转墙体4上侧部与所述主体固定,所述横向翻转墙体4能够沿着所述上侧部转动,使得所述横向翻转墙体4的下侧部向上运动,直至构成水平通道。
12.可选的,还包括智能控制模块,所述智能控制模块包括位于所述运输箱内5的车牌识别单元,显示单元、箱体运动控制单元、翻转墙体控制单元和主控单元;所述主控单元连接到所述箱体运动控制单元和所述翻转墙体控制单元,将所述运输箱运输至主体人员通道处;所述主控单元分别与所述车牌识别单元和显示单元电连接,所述显示单元设置在排队区域;所述车辆识别单元识别到车牌后显示在所述显示单元上,所述控制单元将所述车牌号、所述运输箱的箱号显示在显示单元上。
13.可选的,包括7个所述运输箱5。
14.本技术实施例还提供了一种门体结构,包括上述的避免拥堵的车辆智能接驳系统。
15.可选的,该门体结构包括3组并排设置的所述避免拥堵的车辆智能接驳系统。
16.可选的,所述避免拥堵的车辆智能接驳系统还设置有大通道1.6,所述避免拥堵的车辆智能接驳系统的主体人员通道有两个,分别设置在所述主体的左右两侧。
17.可选的,所述门体结构设置在学校门口。
18.本技术实施例提供的一种避免拥堵的车辆智能接驳系统,包括主体1和多个运输箱5,主体1包括垂直通道v和水平通道h、所述水平通道h下方两侧设置有齿条2,所述垂直通道v四周均设置有齿条2;所述运输箱5为长方体结构,包括箱体5.2,所述运输箱5的8个角分别设置有电机齿轮5.1,所述电机齿轮5.1与所述齿条2配合,并能够在齿条2上进行水平和垂直运动;再通过在主体上设置车辆入口和车辆出口,在运输箱左右两侧设置车辆通道、在主体上设置主体人员通道、在运输箱上设置箱体人员通道,能够使车辆有序进入主体内,在主体内进行排队等候,同时被接送学生可以通过主体人员通道和箱体人员通道进入和走出主体,实现接送过程,如此可以有效提高接送效率、缓解道路拥堵压力。
附图说明
19.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
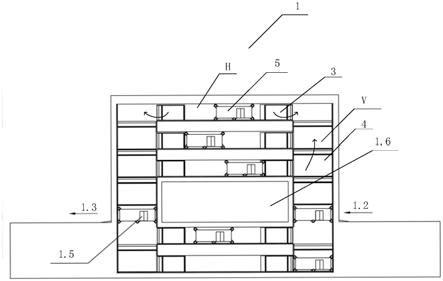
20.图1为本技术实施例提供的一种避免拥堵的车辆智能接驳系统结构的横截面示意图;
21.图2为本技术实施例提供的一种避免拥堵的车辆智能接驳系统的内部结构及齿条
示意图;
22.图3为本技术实施例提供的运输箱的结构示意图;
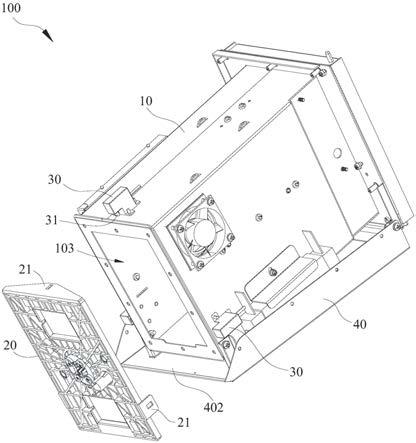
23.图4为本技术实施例提供的一种避免拥堵的车辆智能接驳系统的结构爆炸图;
24.图5为本技术实施例提供的一种避免拥堵的车辆智能接驳系统的斜视外观图;
25.图6为本技术实施例提供的一种运用在学校的避免拥堵的车辆智能接驳系统的示意图。
26.其中:1
‑
主体,1.1
‑
通道,1.2
‑
车辆入口,1.3
‑
车辆出口,1.4
‑
外部人行通道;1.5
‑
左侧主体人员通道;1.6
‑
大通道;1.7
‑
右侧主体人员通道;2
‑
齿条,3
‑
纵向翻转墙体,3.1
‑
纵向墙体齿条,3.2
‑
纵向翻转墙面,4
‑
横向翻转墙体,4.1
‑
横向墙体齿条,4.2
‑
横向翻转墙面,5
‑
运输箱,5.1
‑
电机齿轮,5.2
‑
箱体,5.3
‑
箱体人员通道,5.4
‑
车辆通道,g
‑
门体结构,go
‑
门体结构车辆出口。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”和“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的位置或元件必须具有特定方位、以特定的方位构成和操作,因此不能理解为本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
29.为了缓解学校门口学生接送造成的交通拥堵,本技术实施例提供了一种避免拥堵的车辆智能接驳系统,如图1
‑
3所示,包括主体1和多个运输箱5,主体1包括垂直通道v和水平通道h、所述水平通道h下方两侧设置有齿条2,所述垂直通道v四周均设置有齿条2;主体1设置有主体人员通道1.5;主体1还设置有车辆入口1.2和车辆出口1.3;车辆通过所述车辆入口驶入所述主体、通过所述车辆出口1.3驶离所述主体;
30.运输箱5为长方体结构,包括箱体5.2,运输箱5的8个角分别设置有电机齿轮5.1,电机齿轮5.1与齿条2配合,并能够在齿条2上进行水平和垂直运动;具体的,通过控制运输箱5左右两侧的8个电机齿轮向上或向下转动,能够使运输箱在主体1的垂直通道v内运动;通过控制运输箱5的下侧的4个电机齿轮向左或者向右转动,能够使运输箱在主体1的水平通道h内运动。运输箱左右两侧分别设置有车辆通道5.4,车辆驶入所述主体1后,能够通过左侧的车辆通道驶入箱体5.2内;车辆通过右侧的车辆通道驶离箱体5.2后,能够通过车辆出口1.3驶离主体1;运输箱5侧面设置有箱体人员通道5.3,当运输箱5运动到主体人员通道1.5处,箱体人员通道5.3和主体人员通道1.5至少部分重合,即,留出通道、以便人员进出箱体,出入车辆。通过设置多个运输箱5,使得车辆能够进入运输箱5内,缓解路面拥堵情况,且设置多层结构,使得运输箱5数量能够增加,进一步缓解学校门口路面的车辆拥堵情况。
31.本实施例中,当车辆欲驶入主体1时,运输箱运动至主体1的车辆入口位置,车辆通过车辆入口和右侧的车辆通道驶入运输箱5的箱体5.2内;被接学生可以在主体1的主体人
员通道1.5处等待,当系统控制运输箱5运动到主体人员通道1.5处时,被接学生通过箱体人员通过到进入到箱体5.2的车辆内;车辆再通过运输箱左侧的车辆通道和主体的车辆出口驶离主体,完成学生的“接”。同理,当需要送学生时,工作过程也类似,此时,学生和家长同时和车辆一起进入运输箱,当车辆运动至主体人员通道时,学生下车,而后通过箱体人员通道5.3和主体人员通道1.5离开车辆智能接驳系统;而家长则通过运输箱5左侧的车辆通道和主体的车辆出口1.3开车离开主体1,完成学生的“送”。另外,主体1设置的外部人行通道1.4是为了方便其他人通行,防止该车辆智能接驳系统给系统外的人造成通行困难。
32.进一步的,在一个实施例中,如图1和4所示,避免拥堵的车辆智能接驳系统包括多条通道1.1;主体1包括纵向翻转墙体3和横向翻转墙体4;纵向翻转墙体3包括纵向翻转墙面3.2和设置在纵向翻转墙体3左右两侧的纵向墙体齿条3.1;纵向翻转墙体3翻转后,纵向墙体齿条3.1与主体1的齿条2构成垂直通道v;具体的,纵向翻转墙体设置在主体的水平通道h的后侧,如图1所示,当运输箱要经过某一层垂直通道时,该层对应的纵向翻转墙体3翻转,如图1的左右两个曲线箭头所示,纵向墙体齿条3.1和主体的齿条2共同构成垂直通道v。
33.横向翻转墙体4包括横向翻转墙面4.1和设置在横向翻转墙体4上下两侧的横向墙体齿条4.1;横向翻转墙体4翻转后,所述横向墙体齿条4.1与所述主体的齿条2构成水平通道;具体的,纵向翻转墙体设置在主体的垂直通道v的后侧,如图1所示,当运输箱达到某一层需要将垂直运动切换为水平运动时,该层对应的纵向翻转墙体向上翻转,如图1的向上曲线箭头所示,向上翻转后,横向墙体齿条4.1和主体11的齿条2共同构成水平通道h。
34.进一步的,以附图1、图2和图4为例,通道1.1包括2个垂直通道和5个水平通道,其中两个所述水平通道位于地面下方;本实施例中,如图4所示,避免拥堵的车辆智能接驳系统包括位于右侧的5个纵向翻转墙体3,位于右侧的纵向翻转墙体3的右侧部与主体1固定,位于右侧的纵向翻转墙体3能够沿着所述右侧部转动,使得位于右侧的纵向翻转墙体3的左侧部运动(如图4右侧的纵向翻转墙体3上的箭头所示,沿着右侧部向右转动),直至构成垂直通道;
35.该避免拥堵的车辆智能接驳系统还包括位于左侧的5个纵向翻转墙体3,位于左侧的纵向翻转墙体3的左侧部与所述主体固定,位于左侧的纵向翻转墙体3能够沿着左侧部转动,使得位于左侧的纵向翻转墙体3的右侧部运动(如图4左侧的纵向翻转墙体3上的箭头所示,沿着左侧部向左转动),直至构成垂直通道。
36.进一步的,该避免拥堵的车辆智能接驳系统还包括位于左侧的4个横向翻转墙体4和位于右侧的4个横向翻转墙体4;横向翻转墙体4上侧部与主体1固定,横向翻转墙体4能够沿着上侧部转动,使得所述横向翻转墙体4的下侧部向上运动,直至构成水平通道。
37.本实施例中,以水平通道第三层为例,该避免拥堵的车辆智能接驳系统的工作过程如下:车辆通过主体1的车辆入口1.2和运输箱右侧的车辆通道5.4进入箱体5.2内,运输箱外部的齿轮与右垂直通道两侧的齿条啮合,运输箱开始在右侧垂直通道内作垂直往上的运动。运输箱未运动到第三层水平通道的高度前,该水平通道的纵向翻转墙体3翻转,纵向翻转墙体3翻转两侧的齿条与垂直通道两侧的齿条分别对齐,这样运输箱有了继续往上运动的垂直通道;当运输箱运动到第三层水平通道的高度时,右侧垂直通道的横向翻版墙体翻转,承托住运输箱,确保安全。然后第三层水平通道的纵向翻转墙体3翻转复位,这样运输箱才可以水平往左运动。运输箱未运动到左侧垂直通道前,左侧垂直通道的横向翻版墙体
翻转,作用同样为承托运输箱。运输箱到达左侧垂直通道的横向翻版墙体上后,第三层水平通道的纵向翻转墙体翻转,作用同样为形成运输箱往下运动的通路,运输箱转移到左侧的垂直通道内,最后运动到左侧的垂直通道的车辆出口1.3处,车辆从车辆出口处1.3离开。
38.在上述的避免拥堵的车辆智能接驳系统中,还可以设置智能控制模块,通过智能控制模块可以设置整个车辆智能接驳系统的控制策略,比如在一个实施例中,所述智能控制模块包括位于所述运输箱内5的车牌识别单元,显示单元、箱体运动控制单元、翻转墙体控制单元和主控单元;车牌识别单元能够识别驶入运输箱5内的车辆;箱体运动控制单元用于控制运输箱的电机齿轮运动,从而带动运输箱运动;翻转墙体控制单元能够控制横向/纵向翻转墙体的翻转;主控单元连接到所述箱体运动控制单元和所述翻转墙体控制单元,将所述运输箱运输至主体人员通道处;所述主控单元分别与所述车牌识别单元和显示单元电连接,所述显示单元设置在排队区域,被接学生在排队区域等候,所述车辆识别单元识别到车牌后显示在所述显示单元上,所述控制单元将所述车牌号、所述运输箱的箱号显示在显示单元上。当车辆驶入运输箱5的箱体5.2后,车辆识别单元能够识别到该车牌后,主控单元将该车牌后及运输箱的箱号显示在显示单元上,被接学生能够通过显示屏判断家长的车辆是否进入主体内,从而有序的在主体人员通道外等候;车辆驶入运输箱5的箱体5.2后,车辆驶入运输箱后,主控单元进一步根据其它运输箱的运动轨迹确定出自身运动轨迹,从而通过翻转墙体控制单元控制横向/纵向翻转墙体的翻转、形成完整的箱体运动轨迹,并通过箱体运动控制单元控制运输箱运动,实现学生接送过程。
39.在一个实施例中,一个主体1对应7个运输箱5,如图1和图4所示,能够缓解道路拥堵,并提高接送效率。
40.本技术实施例还提供了一种门体结构,如图5所示,包括上述的避免拥堵的车辆智能接驳系统;该车辆智能接驳系统的主体1还可以设置有大通道1.6,自行上学/放学的学生可以通过大通道1.6进行进出校门;而接送的家长车辆通过主体1的车辆入口进入学生车辆接送流程;进一步的,为了提高接送效率,主体1左右两侧分别设置有主体人员入口,如图标1.5(左侧主体人员入口)和图标1.7(右侧主体人员入口)所示,被接送的学生可以通过左侧主体人员入口1.5和右侧主体人员入口1.7进入/走出到家长的车辆内。
41.在一个实施例中,如图6所示,该门体结构g可以设置在学校门口,该主体结构g包括3组并排设置的上述避免拥堵的车辆智能接驳系统。该门体结构整体外形呈倒t形,安装在校门口,门体结构g的右侧设置3个车辆入口(图中未示出,与车辆出口go对应),门体结构g左侧设置3个车辆出口go,每个车辆入口/出口对应一个车辆智能接驳系统的车辆入口/车辆出口,车辆智能接驳系统如上所述;本实施例中,为了让被接学生知晓家长车辆所在的智能接驳系统,主控单元需将车辆智能接驳系统的序号、运输箱号和车牌号均显示在显示屏上,被接学生根据显示屏上显示的车辆智能接驳系统的序号、运输箱号和车牌号走到对应的车辆智能接驳系统的主体人员通道处上车,完成学生的“接”。
42.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。