1.本发明涉及硬币包装机以及硬币包装机的控制方法。
背景技术:
2.在专利文献1中,公开了一种与硬币包装机有关的技术,该硬币包装机对于将规定枚数的零散硬币沿厚度方向重叠成摞的成摞硬币,利用包装介质将该成摞硬币的外周卷绕起来而进行包装。
3.现有技术文献
4.专利文献
5.专利文献1:日本专利第6173101号公报
6.硬币包装机在将包装介质卷绕在成摞硬币的外周之后,通过使该包装介质中从成摞硬币的上下端伸出的部分卷入包装介质的内侧而将成摞硬币压紧。硬币包装机一边使卷绕有包装介质的成摞硬币旋转,一边向相互接近的方向对压紧爪施力,由此将成摞硬币压紧。
7.然而,包装成摞硬币的包装介质存在纸或树脂等各种材质的包装介质。根据包装介质的材质的不同,刚性等特性是不同的,因此当对硬币包装机应用与纸介质包装相同的设定,并利用树脂介质对成摞硬币进行包装时,有可能产生树脂介质的压曲等包装不良。
技术实现要素:
8.本公开的目的在于提供一种能够根据包装介质的材料来设定成摞硬币的压紧条件的硬币包装机以及硬币包装机的控制方法。
9.根据一个方式,硬币包装机具备:多个辊,其以围成圆柱状的成摞硬币配置空间的方式设置,具有沿所述成摞硬币配置空间的长度方向延伸的旋转轴;辊致动器,其使所述多个辊绕所述旋转轴旋转;供给机构,其将所述包装介质供给到所述多个辊和所述成摞硬币配置空间之间;压紧爪对,其设置为能够从所述成摞硬币配置空间的长度方向的两侧相互接近;压紧致动器,其使所述压紧爪对以相互接近的方式移动;控制装置,其控制所述辊致动器以及所述压紧致动器;所述控制装置具备:动作模式确定部,其确定规定所述辊致动器的旋转速度与所述压紧致动器的移动速度之间的关系的动作模式;信号输出部,其将基于所确定的所述动作模式的控制信号输出到所述辊致动器以及所述压紧致动器中的至少一方。
10.根据上述方式,硬币包装机通过使动作模式不同,能够根据包装介质的材质来设定成摞硬币的压紧条件。
附图说明
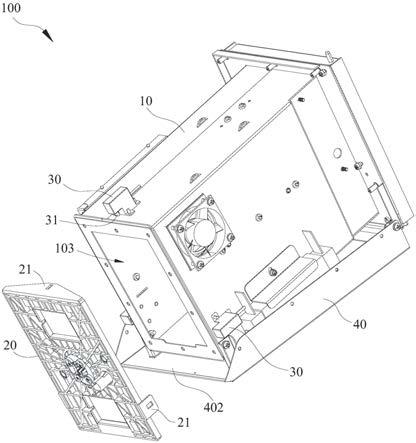
11.图1是第一实施方式的硬币包装机的外观图。
12.图2是示出第一实施方式的硬币包装机的内部构造的概略图。
13.图3是示出第一实施方式的压紧部的结构的立体图。
14.图4是示出第一实施方式的介质供给部的结构的俯视图。
15.图5是示出第一实施方式的静电电容传感器的计测值与包装介质卷的量及材质之间的关系的图。
16.图6是示出第一实施方式的控制装置的结构的概略框图。
17.图7是示出第一实施方式的硬币包装机的包装介质卷监视处理的流程图。
18.图8是示出第一实施方式的硬币包装机的成摞硬币包装处理的流程图。
19.图9是示出第一实施方式的硬币包装机的成摞硬币包装处理时的动作的时序图。
20.图10是示出第二实施方式的硬币包装机的成摞硬币包装处理的流程图。
21.图11是示出第二实施方式的硬币包装机的成摞硬币包装处理时的动作的时序图。
22.图12是示出第三实施方式的介质供给部的结构的俯视图。
23.附图标记说明
[0024]1ꢀꢀꢀ
硬币包装机
[0025]
30
ꢀꢀ
介质供给部
[0026]
313 静电电容传感器
[0027]
50
ꢀꢀ
包装部
[0028]
52
ꢀꢀ
包装辊
[0029]
53
ꢀꢀ
包装马达
[0030]
54
ꢀꢀ
压紧部
[0031]
547 凸轮机构
[0032]
548 凸轮马达
[0033]
70
ꢀꢀ
控制装置
[0034]
71
ꢀꢀ
处理器
[0035]
711 计测值取得部
[0036]
712 设置检测部
[0037]
713 材质确定部
[0038]
714 动作模式确定部
[0039]
715 信号输出部
[0040]
716 余量确定部
[0041]
717 显示控制部
[0042]
73
ꢀꢀ
主存储器
[0043]
731 计测值存储部
[0044]
732 材质存储部
[0045]
s
ꢀꢀꢀ
包装介质
[0046]
s1
ꢀꢀ
包装介质卷
[0047]
c
ꢀꢀꢀ
成摞硬币
具体实施方式
[0048]
<第一实施方式>
[0049]
[硬币包装机的结构]
[0050]
以下,参照附图对实施方式进行详细说明。
[0051]
图1是第一实施方式的硬币包装机的外观图。
[0052]
硬币包装机1将规定数量的零散硬币摞在一起,并且利用包装介质s将这样形成的成摞硬币c包装,使其成为棒状。
[0053]
硬币包装机1具备投入口2以及触摸传感器面板4。投入口2设置在硬币包装机1的上部位置。投入口2接收由操作员投入的包装处理对象即零散硬币。在投入口2上设置有使投入口2开闭的罩3。罩3构成为能够手动开闭。
[0054]
触摸传感器面板4接受包装动作中的币种指定信息等各种设定的输入、以及包装处理的开始/停止的输入操作。另外,触摸传感器面板4显示在硬币包装机1内对硬币进行计数的结果、进行包装动作或打印内容等各种设定时的引导及设定内容等。触摸传感器面板4设置在投入口2的附近。
[0055]
图2是示出第一实施方式的硬币包装机的内部构造的概略图。
[0056]
硬币包装机1具备起摞部10、介质供给部30以及包装部50。
[0057]
起摞部10使经由打开状态的投入口2被统一投入的零散硬币摞在一起。以下,将在起摞部10中摞在一起的硬币称为成摞硬币c。介质供给部30将包装介质s供给到包装部50。包装部50利用从介质供给部30供给的包装介质s对在起摞部10中摞在一起的成摞硬币c进行包装。
[0058]
[起摞部的结构]
[0059]
起摞部10具备旋转斗11、硬币通路12、一对起摞滚筒13和水平闸门14。
[0060]
旋转斗11接受经由投入口2被统一投入的零散硬币。旋转斗11利用通过旋转而产生的离心力逐枚送出硬币。硬币通路12是将从旋转斗11送出的硬币向一对起摞滚筒13之间输送的通路。
[0061]
在硬币通路12上,设置有逐枚移送硬币的输送带121。在硬币通道12的中途位置,设置有未图示的鉴别部,根据需要判别由硬币通道12输送的硬币的真伪以及币种等。在此,在硬币通道12上设有未图示的排除孔,未被鉴别部判别为真币的硬币从排除孔落下。即,硬币通道12仅将真币输送到一对起摞滚筒13之间。
[0062]
一对起摞滚筒13使经由硬币通道12的硬币起摞。各起摞滚筒13分别具有螺旋状的突起部131,各起摞滚筒1在使相互的突起部131的高度位置一致的状态下,与来自硬币通路12的硬币的供给同步地,被向相互相反的方向间歇地旋转驱动。由此,通过硬币通道12供给的硬币被放置在一对起摞滚筒13的突起部131上并下降一级,之后供给的硬币被堆叠在先前的硬币的上方,其结果,在这些起摞滚筒13之间,多枚硬币以在上下方向上堆叠在一起的状态起摞,形成成摞硬币c。
[0063]
水平闸门14设置在一对起摞滚筒13的下方位置。水平闸门14将在一对起摞滚筒13中堆积了规定枚数的成摞硬币c载置在其上表面。即,水平闸门14兼作对成摞硬币c进行载置的底壁。水平闸门14构成为能够开闭。当水平闸门14打开时,载置在水平闸门14的上表面上的成摞硬币c被移送到下方的包装部50。
[0064]
[包装部的结构]
[0065]
包装部50具备支承棒51、三根包装辊52、包装马达53和压紧部54。
[0066]
支承棒51从下方支承从水平闸门14移送来的成摞硬币c。即,在支承棒51的上方,设置有对成摞硬币c进行配置的大致圆筒形的成摞硬币配置空间。三根包装辊52分别以包围成摞硬币配置空间的方式沿着铅垂方向配置。三根包装辊52构成为能够相互接近和分离。包装马达53驱动包装辊52而使包装辊52绕其轴心旋转。
[0067]
压紧部54将卷绕在成摞硬币上的包装介质s在成摞硬币c的上下端处压紧。
[0068]
支承棒51固定在可升降地设置的支承棒臂511的前端,通过未图示的支承棒臂凸轮以及支承棒臂释放凸轮的动作,在水平闸门14敞开时,使支承棒51配置在水平闸门14的正下方。由此,支承棒51在其上端接受落下来的成摞硬币c,之后使该成摞硬币c沿垂直方向下降,由此将成摞硬币c配置在三根包装辊52之间。
[0069]
包装部50使各包装辊52相对于配置在包装辊52之间的成摞硬币c相互接近,由此通过包装辊52夹持成摞硬币c。当包装介质s被介质供给部30供给到成摞硬币c和包装辊52之间时,包装部50通过包装马达53的动作使包装辊52旋转,从而使包装介质s卷绕在成摞硬币c的圆筒面上。在此,包装介质s具有比成摞硬币c的高度大的宽度尺寸。包装马达53是使多个包装辊52绕旋转轴旋转的辊致动器的一例。
[0070]
图3是示出第一实施方式的压紧部的结构的立体图。
[0071]
压紧部54包括上压紧爪541、下压紧爪542、上臂543、下臂544、导向杆545、弹簧546、凸轮机构547、凸轮马达548。
[0072]
上压紧爪541勾在卷绕在成摞硬币c上的包装介质s的上端,通过向下方施力而压紧包装介质s的上端。上压紧爪541固定于上臂543。
[0073]
下压紧爪542勾在卷绕在成摞硬币c上的包装介质s的下端,通过向上方施力而压紧包装介质s的下端。下压紧爪542固定于下臂544。
[0074]
上臂543以及下臂544由导向杆545以能够沿上下方向滑动的方式支承。由此,上臂543以及下臂544能够相互接近或分离。即,通过使上臂543以及下臂544相互接近或分离,使上压紧爪541以及下压紧爪542相互接近或分离。
[0075]
弹簧546以连结上臂543和下臂544的方式安装。弹簧546始终对上臂543和下臂544向相互接近的方向施力。
[0076]
凸轮机构547向上臂543和下臂544传递用于使它们相互接近或分离的动力。凸轮机构547具备第一凸轮61、第一凸轮从动件62、第一摆动臂63、第二凸轮64、第二凸轮从动件65、第二摆动臂66。
[0077]
第一凸轮61以及第二凸轮64通过凸轮马达548沿着铅垂面旋转驱动。第一凸轮61以及第二凸轮64分别具有相同的形状,且按照以旋转轴为中心呈点对称的方式固定在旋转轴上。
[0078]
第一凸轮从动件62沿着第一凸轮61的凸轮面滚动。第一凸轮从动件62安装在第一摆动臂63上。第一摆动臂63的第一端部以能够沿着铅垂面旋转的方式被未图示的固定轴支承。在第一摆动臂63的第二端部,设置有沿着上臂543的下表面滚动的未图示的辊。
[0079]
第二凸轮从动件65沿着第二凸轮64的凸轮面滚动。第二凸轮从动件65安装在第二摆动臂66的第一端部。第二摆动臂66的第一端部以能够沿着铅垂面旋转的方式被未图示的固定轴支承。在第二摆动臂66的第二端部,设置有沿着下臂544的上表面滚动的未图示的辊。
[0080]
因此,在成摞硬币c配置于成摞硬币配置空间的状态下,当凸轮马达548动作时,第一凸轮61以及第二凸轮64被旋转驱动。由此,第一凸轮从动件62以及第二凸轮从动件65沿着第一凸轮61以及第二凸轮64的凸轮面位移。由此,第一摆动臂63以及第二摆动臂66以各自的固定轴为中心在铅直面内进行摆动运动。而且,通过该摆动运动,第一摆动臂63按压上臂543的下表面,第二摆动臂66按压下臂544的上表面,由此,上臂543和下臂544以相互接近或分离的方式沿上下方向移动。
[0081]
通过使上臂543以及下臂544从分离的状态相互接近,使上压紧爪541以及下压紧爪542对卷绕在成摞硬币c上的包装介质s进行压紧。也就是说,凸轮马达548是使作为压紧爪对的上压紧爪541以及下压紧爪54以相互接近的方式移动的压紧致动器的一例。注意,在其它实施例中,也可以通过液压缸或线性马达来实现压紧致动器。
[0082]
[介质供给部的结构]
[0083]
图4是示出第一实施方式的介质供给部的结构的俯视图。
[0084]
介质供给部30具备卷支承部31、供纸辊32、辅助辊33和一对插入引导板34。
[0085]
卷支承部31可旋转地支承包装介质卷s1。包装介质卷s1通过卷绕由纸或树脂膜构成的长条片状的包装介质s而形成为卷状。卷支承部31具有水平配置的台部311和从台部311的中央向铅垂上方延伸的支承轴312。包装介质卷s1使支承轴312插入到内周侧而载置在台部311上。包装介质卷s1与台部311一体地旋转。卷支承部31具有对台部311赋加旋转阻力的未图示的旋转阻力部。因此,台部311如果施加规定以上的外力则旋转,如果不施加外力,则因旋转阻力部的阻力而停止。在台部311的上表面,设置有沿包装介质卷s1的径向延伸的静电电容传感器313。静电电容传感器313计测台部311的上部的静电电容。静电电容传感器313所计测的静电电容根据设置在台部311上的包装介质卷s1的材质以及量而变化。
[0086]
注意,静电电容传感器313可以直接贴附在台部311上,也可以安装在配置于台部311的底面的电路基板上。通过将静电电容传感器313安装在电路基板上,能够防止设置在台部311上的包装介质s对静电电容传感器313造成损伤,能够提高静电电容传感器313的耐久性。
[0087]
图5是示出第一实施方式的静电电容传感器的计测值与包装介质卷的量及材质之间的关系的图。
[0088]
如图5所示,在包装介质卷s1的厚度相同的情况下,在其材质为树脂的情况和为纸的情况下,静电电容传感器313检测出的静电电容的值不同。具体可知:树脂的包装介质卷s1载置于台部311时的静电电容的值比树脂的包装介质卷s1载置于台部311时的静电电容的值小。
[0089]
在此可知:如果新品状态的包装介质卷s1的厚度无论材质如何均相同,则通过确认新品状态的包装介质卷s1被设置在介质供给部30时的静电电容的值,能够确定包装介质s的材质。例如,可知在新品状态的包装介质辊s1的厚度为45.0mm的情况下,如果静电电容的值为第一阈值以上,则包装介质s的材质为纸。可知如果静电电容的值小于第二阈值,则包装介质s的材质为树脂。
[0090]
返回到图4,供纸辊32以及辅助辊33在卷支承部31和包装部50之间设置在包装部50的附近。供纸辊32通过进行旋转而从支承于卷支承部31的包装介质卷s1卷取包装介质s并将该包装介质s向包装部50供给。通过使辅助辊33与供纸辊32对置地设置,利用供纸辊32
和辅助辊33夹持包装介质s。
[0091]
插入引导板34是设置在从卷支承部31到供纸辊32以及辅助辊33为止的包装介质s的路径上的壁板。
[0092]
[控制装置的结构]
[0093]
图6是示出第一实施方式的控制装置的结构的概略框图。
[0094]
硬币包装机1在内部具备用于控制硬币包装机1的控制装置70。
[0095]
控制装置70具备处理器71、主存储器73、存储器75、接口77。
[0096]
在存储器75中以程序的形式存储有用于控制硬币包装机1的处理。处理器71从存储器75读出程序并将该程序在主存储器73中展开,并按照该程序执行处理。另外,处理器71按照程序在主存储器73中确保规定的存储区域。作为处理器71的例子,可以列举cpu(中央处理单元(central processing unit))、gpu(图形处理单元(graphic processing unit))、微处理器等。
[0097]
程序可以是用于实现控制装置70所发挥的功能的一部分的程序。例如,程序可以通过与已经存储在存储器中的其他程序的组合、或者与安装在其他装置中的其他程序的组合来发挥功能。
[0098]
作为存储器75的例子,可以列举磁盘、光盘、磁光盘、半导体存储器等。存储器75可以是与控制装置70的总线直接连接的内部介质,也可以是经由接口77或通信线路与控制装置70连接的外部介质。另外,在该程序通过通信线路被分配给控制装置70的情况下,接受到分配的控制装置70也可以将该程序在主存储器73中展开,并执行上述处理。在至少一个实施方式中,存储器75是非临时的有形的存储介质。
[0099]
注意,在其它实施方式中,控制装置70可以在上述结构的基础上或者代替上述结构而具备pld(可编程逻辑器件(programmable logic device))等定制lsi(大规模集成电路(large scale integrated circuit))。作为pld的例子,可以列举pal(可编程逻辑阵列(programmable array logic))、gal(通用阵列逻辑(generic array logic))、cpld(兼容可编程逻辑器件(complex programmable logic device))、fpga(现场可编程逻辑阵列(field programmable gate array))。在该情况下,由处理器71实现的功能的一部分或全部可以由该集成电路实现。这样的集成电路也包含在处理器的一个例子中。
[0100]
处理器71通过执行程序而具备计测值取得部711、设置检测部712、材质确定部713、动作模式确定部714、信号输出部715、余量确定部716、显示控制部717。另外,处理器71在执行程序时,在主存储器73中确保计测值存储部731以及材质存储部732的存储区域。计测值存储部731存储静电电容传感器313的静电电容计测值。材质存储部732存储设置在介质供给部30的包装介质卷s1的材质。另外,在存储器75中存储图5所示的表示包装介质s的材质为树脂的情况下的包装介质卷s1的余量与静电电容的关系的第一余量函数751和表示包装介质s的材质为纸的情况下的包装介质卷s1的余量与静电电容的关系的第二余量函数752。注意,“函数”不限定于将关系表示为数学式的函数,还包括将关系表示为表的函数等。
[0101]
计测值取得部711从静电电容传感器313取得计测值。计测值取得部711将取得的计测值记录在计测值存储部731中。
[0102]
设置检测部712基于计测值取得部711取得的计测值,检测出在介质供给部30中设置了新的包装介质卷s1这一情况。具体而言,第三阈值是相当于包装介质卷s1的余量为零
的状态的阈值,第四阈值是表示存在包装介质卷s1的阈值,设置检测部712在静电电容的计测值从小于该第三阈值到变为该第四阈值以上的情况下,判定为在介质供给部30设置了新的包装介质卷s1。在包装介质卷s1的更换时,从介质供给部30取下旧的包装介质卷s1,此时静电电容的计测值一定低于第三阈值。因此,设置检测部712通过检测出静电电容的计测值从小于第三阈值变为第四阈值以上,能够检测出在介质供给部30中设置了新的包装介质卷s1。
[0103]
材质确定部713在由设置检测部712检测到设置了包装介质卷s1时,基于由计测值取得部711取得的计测值确定包装介质卷s1的材质。具体而言,材质确定部713在由计测值取得部711取得的计测值为图5所示的第一阈值以上的情况下,确定为包装介质卷s1的材质是纸。另一方面,材质确定部713在由计测值取得部711取得的计测值小于图5所示的第二阈值的情况下,确定为包装介质卷s1的材质是树脂。材质确定部713将所确定的材质记录在材质存储部732中。
[0104]
动作模式确定部714基于材质存储部732所存储的材质,确定规定凸轮马达548的旋转速度的动作模式。硬币包装机1的动作模式包括用于压紧纸制的包装介质s的第一模式和用于压紧树脂制的包装介质s的第二模式。第一模式是使凸轮马达548的旋转速度以第一速度进行驱动的模式。第二模式是使凸轮马达548的旋转速度以第二速度进行驱动的模式。例如,第一速度可以设定为第二速度的两倍的速度。
[0105]
信号输出部715将使包装马达53以一定速度旋转的包装指示信号输出到包装马达53。另外,信号输出部715将使凸轮马达548以与动作模式确定部714所确定的动作模式相关的速度旋转的压紧指示信号输出到凸轮马达548。
[0106]
余量确定部716基于材质存储部732所存储的材质以及计测值取得部711所取得的计测值,确定包装介质卷s1的余量。具体而言,余量确定部716基于材质存储部732所存储的材质,确定用于计算余量的函数。即,在材质存储部732所存储的材质为纸的情况下,余量确定部716从存储器75读出第一余量函数751。另一方面,在材质存储部732存储的材质为树脂的情况下,余量确定部716从存储器75读出第二余量函数752。余量确定部716通过将计测值取得部711所取得的计测值代入所读出的函数,确定包装介质卷s1的余量。
[0107]
显示控制部717将用于显示余量确定部716所确定的包装介质卷s1的余量的显示信号输出到触摸传感器面板4。
[0108]
[硬币包装机的控制方法]
[0109]
硬币包装机每隔一定的控制时间,执行以下所示的包装介质卷s1的监视处理。在包装介质卷s1的监视处理中,进行包装介质卷s1的更换的有无、包装介质s的材质的确定以及包装介质s的余量的确定。
[0110]
图7是示出第一实施方式的硬币包装机的包装介质卷监视处理的流程图。
[0111]
首先,计测值取得部711从静电电容传感器313取得计测值(步骤s1)。设置检测部712判定存储在计测值存储部731中的静电电容的计测值是否小于第三阈值(步骤s2)。即,设置检测部712判定在上次的计测时包装介质卷s1的余量是否已经变为零。在存储在计测值存储部731中的静电电容的计测值小于第三阈值的情况下(步骤s2:是),设置检测部712判定在步骤s1中取得的计测值是否为第四阈值以上(步骤s3)。即,设置检测部712判定在本次计测时在台部311上是否存在包装介质卷s1。在步骤s1中取得的计测值为第四阈值以上
的情况下(步骤s3:是),设置检测部712判定为进行了包装介质卷s1的更换。另一方面,在存储在计测值存储部731中的静电电容的计测值为第三阈值以上的情况下(步骤s2:否),或者在步骤s1中取得的计测值小于第四阈值的情况下(步骤s3:否),设置检测部712判定为没有进行包装介质卷s1的更换。
[0112]
在由设置检测部712判定为进行了包装介质卷s1的更换的情况下,材质确定部713判定在步骤s1中取得的计测值是否为第一阈值以上(步骤s4)。在计测值为第一阈值以上的情况下,材质确定部713确定为包装介质s的材质是纸,在材质存储部732中记录所确定的材质(步骤s5)。
[0113]
另一方面,在计测值小于第一阈值的情况下(步骤s4:否),材质确定部713判定在步骤s1中取得的计测值是否小于第二阈值(步骤s6)。在计测值小于第二阈值的情况下,材质确定部713确定为包装介质s的材质是树脂,在材质存储部732中记录所确定的材质(步骤s7)。
[0114]
另一方面,在计测值为第二阈值以上且小于第一阈值的情况下(步骤s4:否),显示控制部717将用于显示表示错误的画面的显示信号输出到触摸传感器面板4(步骤s8),并结束处理。注意,材质确定部713在确认了包装介质卷s1的更换之后,在判断为包装介质s的材质既不是纸也不是树脂的情况下,也可以将计测值与存储在材质存储部732中的其他静电电容进行比较,报知是根据在规定的误差范围内一致的静电电容确定的材质的包装介质s。另外,材质确定部713也可以与存储在外部的服务器中的静电电容进行比较来确定材质。
[0115]
在步骤s2或步骤s3中判定为没有进行包装介质卷s1的更换的情况下,余量确定部716判定材质存储部732所存储的材质是纸还是树脂(步骤s9)。
[0116]
在材质存储部732所存储的材质是纸的情况下(步骤s9:纸),或者在步骤s5中确定为材质是纸的情况下,余量确定部716将在步骤s1中取得的计测值代入到存储在存储器75中的第一余量函数751,由此确定包装介质卷s1的余量(步骤s10)。
[0117]
另一方面,在材质存储部732存储的材质是树脂的情况下(步骤s9:树脂),或者在步骤s7中确定为材质是树脂的情况下,余量确定部716将在步骤s1中取得的计测值代入到存储在存储器75中的第二余量函数752,由此确定包装介质卷s1的余量(步骤s11)。
[0118]
显示控制部717将用于对在步骤s10或步骤s11中确定的包装介质卷s1的余量进行显示的显示信号输出到触摸传感器面板4(步骤s12)。作为包装介质卷s1的余量显示的例子,可以列举包装介质卷s1的厚度显示、剩余可使用次数显示、接近用完显示、用完显示等。然后,计测值取得部711将在步骤s1中取得的计测值记录在计测值存储部731中(步骤s13),结束处理。
[0119]
图8是示出第一实施方式的硬币包装机的成摞硬币包装处理的流程图。图9是示出第一实施方式的硬币包装机的成摞硬币包装处理时的动作的时序图。在图9中,记载了分别表示未图示的供纸马达、包装马达53以及凸轮马达548的速度随时间的变化的时序图。当向硬币包装机1投入了一定量的零散硬币,并通过使水平闸门14敞开而将成摞硬币c配置于成摞硬币配置空间时,动作模式确定部714判定材质存储部732所存储的材质是纸还是树脂(步骤s31)。
[0120]
在材质存储部732所存储的材质是纸的情况下(步骤s31:纸),动作模式确定部714将动作模式确定为第一模式(步骤s32)。另一方面,在材质存储部732所存储的材质是树脂
的情况下(步骤s31:树脂),动作模式确定部714将动作模式确定为第二模式(步骤s33)。
[0121]
信号输出部715将使凸轮马达以与所确定的动作模式对应的速度旋转的旋转指示信号输出到凸轮马达548(步骤s34)。由此,如图9的凸轮马达548的时序图所示,实线所示的第二模式下的凸轮马达548的速度与虚线所示的第一模式下的凸轮马达548的速度互相不同。
[0122]
之后,信号输出部715将使供纸马达以一定速度进行旋转的旋转指示信号输出到使供纸辊32旋转的未图示的供纸马达(步骤s35)。当使供纸马达旋转了一定时间时,信号输出部715将停止指示信号输出到供纸马达(步骤s36)。接着,信号输出部715将以一定速度旋转的旋转指示信号输出到包装马达53(步骤s37)。之后,信号输出部715将停止指示信号输出到凸轮马达以及包装马达53(步骤s38)。例如,在实施方式中,在凸轮马达548旋转一周时第一凸轮61和第二凸轮64分别旋转一周的情况下,信号输出部715在凸轮马达548(第一凸轮61和第二凸轮64)旋转了一周之后,将停止指示信号输出到凸轮马达548。由此,如图9的凸轮马达548的时序图所示,实线所示的第二模式下的凸轮马达548的停止时刻与虚线所示的第一模式下的凸轮马达548的停止时刻互相不同。
[0123]
另外,在包装马达53旋转到了规定的停止位置时,信号输出部715将停止指示信号输出到包装马达53。即,在图9所示的例子中,包装马达53和凸轮马达548在不同的时刻停止,但包装马达53和凸轮马达548也可以在大致相同的时刻停止。
[0124]
[作用及效果]
[0125]
这样,根据第一实施方式,控制装置70确定规定凸轮马达548的旋转速度的动作模式,将基于所确定的动作模式的控制信号输出到凸轮马达548。由此,硬币包装机1能够通过根据包装介质的材料切换预先设定的动作模式来变更包装辊52每旋转一周时的上夹紧爪541和下夹紧爪542的接近速度。因此,通过根据包装介质适当地确定动作模式,硬币包装机1能够以适当的速度将包装了成摞硬币c的包装介质s的两端侧压紧。
[0126]
另外,根据第一实施方式,控制装置70基于静电电容传感器313的计测值确定包装介质s的材质,基于所确定的材质确定动作模式。由此,硬币包装机1能够基于静电电容传感器313的测定值自动地确定设置在台部311的包装介质s的材质,能够以根据包装介质s的材质而确定的动作模式以适当的速度将包装成摞硬币c的包装介质的两端侧压紧。
[0127]
注意,第一实施方式的静电电容传感器313在台部311沿着包装介质卷s1的径向设置,但在其他实施方式中并不限定于此。例如,在其他实施方式中,静电电容传感器313也可以沿着支承轴312设置。即使静电电容传感器313沿着支承轴312设置,由于静电电容传感器313的输出值根据包装介质卷s1的材质及余量而变化,因此也能够适当地确定包装介质s的材质及余量。
[0128]
<第二实施方式>
[0129]
第一实施方式的硬币包装机1将包装马达53的转数设为一定,使凸轮马达548的转数根据包装介质s的材质而变化。与此相对,第二实施方式的硬币包装机2将凸轮马达548的转数设为一定,使包装马达53的转数根据包装介质s的材质而变化。
[0130]
图10是示出第二实施方式的硬币包装机的成摞硬币包装处理的流程图。图11是示出第二实施方式的硬币包装机的成摞硬币包装处理时的动作的时序图。在图11中,记载了分别表示未图示的供纸马达、包装马达53以及凸轮马达548的速度随时间的变化的时序图。
[0131]
当向硬币包装机1投入了一定量的零散硬币,并通过使水平闸门14敞开而将成摞硬币c配置于成摞硬币配置空间时,动作模式确定部714判定材质存储部732所存储的材质是纸还是树脂(步骤s131)。在材质存储部732所存储的材质是纸的情况下(步骤s131:纸),动作模式确定部714将动作模式确定为第一模式(步骤s132)。另一方面,在材质存储部732所存储的材质是树脂的情况下(步骤s131:树脂),动作模式确定部714将动作模式确定为第二模式(步骤s133)。
[0132]
接着,信号输出部715将以一定速度进行旋转的旋转指示信号输出到凸轮马达(步骤s134)。
[0133]
在第二实施方式中,凸轮马达的旋转速度被设定为在第一实施方式中说明的包装介质为树脂的情况下(第二模式)的凸轮马达的旋转速度。在该情况下,就包装马达的旋转速度而言,第一模式下的旋转速度相对于第二模式下的旋转速度被设定为约2倍的速度。注意,凸轮马达的旋转速度也可以设定为在第一实施方式中说明的包装介质为纸的情况下(第一模式)的凸轮马达的旋转速度,在该情况下,就包装马达的旋转速度而言,第一模式的旋转速度相对于第二模式的旋转速度为约1/2倍的速度。
[0134]
接着,信号输出部715将以一定速度进行旋转的旋转指示信号输出到使供纸辊32旋转的未图示的供纸马达(步骤s135)。当使供纸马达旋转了一定时间时,信号输出部715将停止指示信号输出到供纸马达(步骤s136)。接着,信号输出部715向包装马达53输出使包装马达53以与在步骤s132或步骤s133中确定的动作模式对应的速度进行旋转的旋转指示信号(步骤s137)。例如,动作模式为第一模式的情况下的包装马达53的转数可以设定为动作模式为第二模式的情况下的包装马达53的转数的1/2。由此,如图11包装马达53的时序图所示,虚线所示的第二模式下的包装马达53的速度与实线所示的第一模式下的包装马达53的速度互相不同。
[0135]
之后,信号输出部715将停止指示信号输出到包装马达53以及凸轮马达548(步骤s138)。
[0136]
[作用及效果]
[0137]
这样,根据第二实施方式,控制装置70确定规定包装马达53的旋转速度的动作模式,并将基于所确定的动作模式的控制信号输出到包装马达53。由此,硬币包装机1能够根据动作模式来变更上压紧爪541和下压紧爪542的每一移动速度下的包装辊52的转数。由此,通过确定与包装介质的材质对应的适当的动作模式,能够适当地包装成摞硬币c。
[0138]
注意,第一实施方式的控制装置将包装马达53设为一定速度,根据动作模式来变更凸轮马达548的旋转速度,第二实施方式的控制装置将凸轮马达548设为一定速度,根据动作模式来变更包装马达53的旋转速度。另一方面,在其他实施方式中,控制装置70也可以根据动作模式来变更包装马达53以及凸轮马达548双方的旋转速度。在任一实施方式中,动作模式均规定包装马达53的旋转速度与凸轮马达548的旋转速度的相对关系。
[0139]
<第三实施方式>
[0140]
第一实施方式以及第二实施方式的控制装置70基于静电电容传感器313的计测值确定包装介质s的材质。与此相对,第三实施方式的控制装置70使用光学传感器确定包装介质s的材质。
[0141]
图12是示出第三实施方式的介质供给部的结构的俯视图。如图12所示,代替静电
电容传感器313,具备第一发光元件341、第一受光元件342、第二发光元件343、第二受光元件344。
[0142]
第一发光元件341以及第二发光元件343设置在一对插入引导板34中的一方上。第一受光元件342以及第二受光元件344设置在一对插入引导板34中的另一方上。第一受光元件342以与第一发光元件341对置的方式设置。第二受光元件344以与第二发光元件343对置的方式设置。
[0143]
第一发光元件341透过树脂发出可被纸吸收或反射的波长的光。由此,如果第一受光元件342不能接受第一发光元件341所发出的光,则可知纸制的包装介质s正在穿过一对插入引导板34之间。即,第一发光元件341以及第一受光元件342作为纸检测传感器发挥功能。
[0144]
第二发光元件343发出可被树脂以及纸吸收或反射的波长的光。由此,如果第二受光元件344不能接受第二发光元件343所发出的光,则可知纸制或树脂制的包装介质s正在穿过一对插入引导板34之间。即,第二发光元件343以及第二受光元件344作为介质检测传感器发挥功能。
[0145]
第三实施方式的计测值取得部711取得第一受光元件342以及第二受光元件344的光量的计测值。而且,材质确定部713在第一受光元件342的受光量以及第二受光元件的受光量均为阈值以上的情况下,判定为未设置包装介质卷s1。材质确定部713在第一受光元件342的受光量为阈值以上、第二受光元件344的受光量小于阈值的情况下,判定为包装介质s的材质是树脂。材质确定部713在第一受光元件342的受光量以及第二受光元件344的受光量小于阈值的情况下,判定为包装介质s的材质是纸。
[0146]
这样,第三实施方式的控制装置70即使使用静电电容传感器313以外的传感器的计测值,也能够确定包装介质s的材质。注意,在第三实施方式中,使用两种发光元件来确定包装介质s的材质,但在其他实施方式中并不限定于此。例如,在其他实施方式中,发光元件发出在树脂和纸的情况下吸收率不同的波长的光,由此,控制装置70可以基于受光元件中的受光水平来确定包装介质s的材质。
[0147]
<其他实施方式>
[0148]
以上,参照附图对一实施方式进行了详细说明,但具体结构并不限定于上述结构,可以进行各种设计变更等。例如,在其他实施方式中,上述处理顺序也可以适当变更。另外,也可以并行地执行一部分处理。
[0149]
另外,在其他实施方式中,也可以不具备计测包装介质s的物理量的传感器,而是通过使用者的开关操作等来接受材质或动作模式的输入。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。