本实用新型涉及一种盒装食品无人智能售货柜组件,具体说是用于存放盒装食品的无人售货机用盒装食品货仓。
背景技术:
盒装食品无人智能售货柜,顾名思义是一种用于售卖盒装食品的自动售货机。盒装食品无人智能售货柜中均有盒装食品货仓。目前,传统的无人售货机用盒装食品货仓包括盒体,盒体正面的下部有取货口,盒体中均布有水平布置的货架,货架中均有出货机构。这种盒装食品货仓每个货架上均需单独配备出货机构,需要的出货机构较多,占用货仓的空间较大,导致货仓可存放的盒装食品较少。而且,较多的出货机构会导致整个货仓的结构较复杂,制造成本较高。
技术实现要素:
本实用新型要解决技术问题是提供一种无人售货机用盒装食品货仓,该货仓可存放的盒装食品较多,结构简单,制造成本较低。
为解决上述问题,提供以下技术方案:
本实用新型的无人售货机用盒装食品货仓包括盒体。其特点是所述盒体底部有水平导轨,水平导轨一端对应的盒体侧壁上有出货口。所述水平导轨两侧的盒体内沿水平导轨纵向均布有储货间,储货间上均有取料口,所述水平导轨上有用于将盒装食品从储货间取料口中取出的取料机构,取料机构与盒体间有用于驱动取料机构沿水平导轨纵向滑动的第一驱动机构。所述取料机构上方的盒体上有沿水平导轨纵向布置的横梁,横梁上有推料机构,推料机构与支架间有用于带动推料机构上、下活动的第二驱动装置,推料机构的底部有水平布置的推杆,推杆沿水平导轨的纵向布置,推杆的前端朝向出货口,推料机构中有用于驱动推杆沿其纵活动的第三驱动装置。
其中,所述储货间包括两个平行并排布置的立板,立板与所述水平导轨垂直,立板的下边上均有朝向另一立板伸出的承料板,两个承料板间的距离小于盒装食品的宽度,远离水平导轨的两个立板的那个竖边间有挡板,靠近水平导轨的那个立板竖边上均有向着另一个立板弯曲的弯折部,弯折部和挡板的下边与承料板间均有间距,挡板和弯折部与承料板间的间距即为所述取料口,取料口的竖向宽度大于一个盒装食品的厚度、小于两个盒体食品的厚度之和。
所述取料机构包括水平布置的上支撑板和下支撑板,上支撑板与下支撑板呈平行并排布置,所述第一驱动机构位于下支撑板与盒体间,上支撑板位于所述储货间的下方。所述上支撑板与下支撑板间有两个竖向布置的支撑框,支撑框与水平导轨垂直,支撑框与上支撑板和下支撑板间呈滑动状配合,支撑框滑动方向与水平导轨垂直,一个支撑框的前端朝向水平导轨一侧的储货间,另一个支撑框的前端朝向水平导轨另一侧的储货间。所述支撑框一侧的上支撑板和下支撑板间均有竖向布置的连接板,连接板的外侧面上固定有第一驱动电机,第一驱动电机的输出部穿过连接板伸入到对应的支撑框内,第一驱动电机的输出部上有第一齿轮,所述支撑框上边框的下表面上均有第一齿条,第一齿轮与对应的第一齿条啮合在一起。所述支撑框的前端均通过销轴铰接有重块,销轴与所述水平导轨平行,重块的顶部固定有推料板,在没有外力的作用下,重块和推料板呈竖向布置,此时,推料板上边沿的高度高于所述承料板的高度、小于承料板的高度与一个盒装食品的厚度之和,推料板的宽度小于两个承料板间的距离。
所述支撑框内侧的下支撑板上均有导向块,导向块上均有水平布置的导杆,导杆与所述水平导轨垂直,导杆与导向块间呈滑动状配合,支撑框的两个侧边框上均有延伸部,导杆的两端分别固定在对应支撑框的延伸部上。
所述推料机构包括竖向布置的活动框,所述横梁上有竖向导条,竖向导条对应的活动框上有竖向导轨,竖向导轨与竖向条相连,且竖向导轨与竖向导条间呈上、下滑动状配合。所述第二驱动装置包括固定在横梁上的第二驱动电机,第二驱动电机的输出轴上有第二齿轮,所述活动框上有竖向布置的第二齿条,第二齿轮与第二齿条啮合在一起。
所述推杆位于活动框下边框的下部,且推杆与活动框的下边框间呈滑动状配合,所述第三驱动装置包括固定在活动框上的第三驱动电机,第三驱动电机的输出部上有第三齿轮,所述推杆上有沿其纵向布置的第三齿条,第三齿轮与第三齿条啮合在一起。
所述水平导轨有两个,它们呈平行并排布置。所述第一驱动机构包括主动带轮和从动带轮,主动带轮和从动带轮位于两个水平导轨间,且主动带轮和从动带轮分别与水平导轨的两端对应,主动带轮连接有第四驱动电机,主动带轮与从动带轮间套连有同步带,所述取料机构的底部固定在同步带上。
采取以上方案,具有以下优点:
由于本实用新型的无人售货机用盒装食品货仓的盒体底部有水平导轨,水平导轨一端对应的盒体侧壁上有出货口,水平导轨两侧的盒体内沿水平导轨纵向均布有储货间,储货间上均有取料口,水平导轨上有用于将盒装食品从储货间取料口中取出的取料机构,取料机构与盒体间有用于驱动取料机构沿水平导轨纵向滑动的第一驱动机构,取料机构上方的盒体上有沿水平导轨纵向布置的横梁,横梁上有推料机构,推料机构与支架间有用于带动推料机构上、下活动的第二驱动装置,推料机构的底部有水平布置的推杆,推杆的前端朝向出货口,推料机构中有用于驱动推杆沿其纵活动的第三驱动装置。使用时,通过水平导轨和第一驱动机构,即可带动取料机构对任意储货间中的盒装食品取出,通过推料机构可将位于取料机构上的盒装食品从出货口中推出,实现出料。这种无人售货机用盒装食品货仓利用取料机构、第一驱动机构和脱料机构构成一套取料机构,利用一套出货机构即可实现取料,与背景技术中每个货架上均需配套出货机构相比,大大减少的出货机构的数量,缩小了对货仓空间的占用,使得货仓可存放的盒装食品变多。而且,简化了货仓的结构,降低了货仓的制造成本。
附图说明
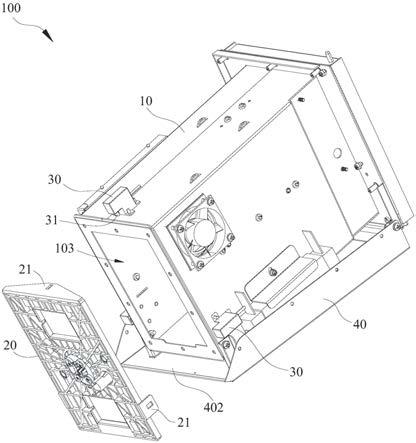
图1是本实用新型的无人售货机用盒装食品货仓的结构示意图(隐藏盒体封板);
图2是图2在隐藏水平导轨一侧所有储货间后的结构示意图;
图3是图2的a部放大图;
图4是本实用新型的无人售货机用盒装食品货仓中储货间的结构示意图;
图5是本实用新型的无人售货机用盒装食品货仓中取料机构在隐藏上支撑板后的结构示意图;
图6是本实用新型的无人售货机用盒装食品货仓中推料机构的结构示意图。
具体实施方式
以下结合附图对本实用新型做进一步详细说明。
如图1~6所示,本实用新型的无人售货机用盒装食品货仓包括盒体,该盒体由框架1和封板组成。所述盒体底部有水平导轨9,水平导轨9一端对应的盒体侧壁上有出货口。所述水平导轨9两侧的盒体内沿水平导轨9纵向均布有储货间,储货间上均有取料口28,所述水平导轨9上有用于将盒装食品从储货间取料口28中取出的取料机构,取料机构与盒体间有用于驱动取料机构沿水平导轨9纵向滑动的第一驱动机构。所述取料机构上方的盒体上有沿水平导轨9纵向布置的横梁5,横梁5上有推料机构,推料机构与支架间有用于带动推料机构上、下活动的第二驱动装置,推料机构的底部有水平布置的推杆25,推杆25沿水平导轨9的纵向布置,推杆25的前端朝向出货口,推料机构中有用于驱动推杆25沿其纵活动的第三驱动装置。
所述储货间包括两个平行并排布置的立板3,立板3与所述水平导轨9垂直,立板3的下边上均有朝向另一立板3伸出的承料板29,两个承料板29间的距离小于盒装食品的宽度,远离水平导轨9的两个立板3的那个竖边间有挡板4,靠近水平导轨9的那个立板3竖边上均有向着另一个立板3弯曲的弯折部2,弯折部2和挡板4的下边与承料板29间均有间距,挡板4和弯折部2与承料板29间的间距即为所述取料口28,取料口28的竖向宽度大于一个盒装食品的厚度、小于两个盒体食品的厚度之和。
所述取料机构包括水平布置的上支撑板10和下支撑板11,上支撑板10与下支撑板11呈平行并排布置,所述第一驱动机构位于下支撑板11与盒体间,上支撑板10位于所述储货间的下方。所述上支撑板10与下支撑板11间有两个竖向布置的支撑框31,支撑框31与水平导轨9垂直,支撑框31与上支撑板10和下支撑板11间呈滑动状配合,支撑框31滑动方向与水平导轨9垂直,一个支撑框31的前端朝向水平导轨9一侧的储货间,另一个支撑框31的前端朝向水平导轨9另一侧的储货间。所述支撑框31一侧的上支撑板10和下支撑板11间均有竖向布置的连接板18,连接板18的外侧面上固定有第一驱动电机17,第一驱动电机17的输出部穿过连接板18伸入到对应的支撑框31内,第一驱动电机17的输出部上有第一齿轮,所述支撑框31上边框的下表面上均有第一齿条22,第一齿轮与对应的第一齿条22啮合在一起。所述支撑框31的前端均通过销轴铰接有重块23,销轴与所述水平导轨9平行,重块23的顶部固定有推料板19,在没有外力的作用下,重块23和推料板19呈竖向布置,此时,推料板19上边沿的高度高于所述承料板29的高度、小于承料板29的高度与一个盒装食品的厚度之和,推料板19的宽度小于两个承料板29间的距离。
所述支撑框31内侧的下支撑板11上均有导向块20,导向块20上均有水平布置的导杆21,导杆21与所述水平导轨9垂直,导杆21与导向块20间呈滑动状配合,支撑框31的两个侧边框上均有延伸部30,导杆21的两端分别固定在对应支撑框31的延伸部30上。
所述推料机构包括竖向布置的活动框24,所述横梁5上有竖向导条12,竖向导条12对应的活动框24上有竖向导轨13,竖向导轨13与竖向条相连,且竖向导轨13与竖向导条12间呈上、下滑动状配合。所述第二驱动装置包括固定在横梁5上的第二驱动电机14,第二驱动电机14的输出轴上有第二齿轮,所述活动框24上有竖向布置的第二齿条15,第二齿轮与第二齿条15啮合在一起。
所述推杆25位于活动框24下边框的下部,且推杆25与活动框24的下边框间呈滑动状配合,所述第三驱动装置包括固定在活动框24上的第三驱动电机27,第三驱动电机27的输出部上有第三齿轮,所述推杆25上有沿其纵向布置的第三齿条26,第三齿轮与第三齿条26啮合在一起。
所述水平导轨9有两个,它们呈平行并排布置。所述第一驱动机构包括主动带轮8和从动带轮16,主动带轮8和从动带轮16位于两个水平导轨9间,且主动带轮8和从动带轮16分别与水平导轨9的两端对应,主动带轮8连接有第四驱动电机6,主动带轮8与从动带轮16间套连有同步带7,所述取料机构的底部固定在同步带7上。
使用时,将盒装食品竖向堆叠到储货间中。将第一驱动电机17、第二驱动电机14、第三驱动电机27和第四驱动电机6均与无人售货机的控制装置相连。取货时,根据目标储货间的位置,控制装置控制第四驱动电机6通过同步带7驱动取货机构运行到目标储货间的位置。接着,控制装置控制对应的第一驱动电机17带动支撑框31向前伸出,推料板19从储货间的下方向前运动,在盒装食品的作用下,推料板19和重块23呈倾斜布置,直至推料板19和重块23运动到储货间外侧。然后,在重块23的作用下,推料板19呈竖向布置,控制装置控制对应的第一驱动电机17带动支撑框31复位,推料板19将最下方的盒体食品推到上支撑板10上。之后,控制装置控制第四驱动电机6带动取料机构复位。之后,控制装置控制第二驱动电机14带动活动框24下行,再控制第三驱动电机27带动推杆25伸出,将上支撑板10上的盒装食品从出货口推出。最后,控制装置控制活动框24和推杆25复位即可。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。