1.本发明涉及电力储能领域,涉及一种水上漂浮垃圾识别与采集系统的处理方法;更具体地,涉及一种水上漂浮垃圾识别与采集路径自动规划系统及其处理方法。
背景技术:
2.水域垃圾污染是指漂浮在各类水体(海洋、江河、湖泊等)表面的,破环水体的自然性状,并对公众造成视觉影响的各种废弃物引起的污染。进入21世纪以来,我国水域垃圾污染问题日益严重。水域垃圾已经成了水体污染的重要来源,不仅影响了海洋江河湖泊生态系统,危害到居民健康,还对景观造成了严重的损害。甚至是对航道、大坝造成巨大的威胁,造成严重的经济损失。因此对我国的水域垃圾收集、清理的研究具有十分重要意义。
3.目前水域垃圾的清理方法主要是人工划船打捞的方式。为解决水域垃圾问题,我国推行“河长制”、“湖长制”制度,已更好的解决水上漂浮垃圾问题,但目前的垃圾打捞方式严重的制约了水上垃圾清理的效率和积极性。
技术实现要素:
4.发明目的:本发明的目的是提供了一种水上漂浮垃圾识别与采集路径自动规划系统,设计智能识别与路径规划方法,以更好的解决水上漂浮垃圾收集耗费大量人力物力的问题。一种水上漂浮垃圾识别与采集系统的识别部分,包含“水介质”识别、“水上漂浮物识别”、“收集垃圾”识别等方式层层递进,将“岸”、“岛”、“礁”等障碍物在识别过程中排除,方便了“避障”问题,识别过程中采用模糊判别的方法,结合人为深度学习方法,加强了设备的识别能力和适应能力;一种水上漂浮垃圾识别与采集系统的的路径规划部分以距离信息为基本判别方法,由近及远,提高了工作效率,节省了工作时间;一种水上漂浮垃圾识别与采集系统的自动运行部分,采用可旋转螺旋桨驱动,过程简单,避免了漏洞问题。
5.技术方案:本发明所述的一种水上漂浮垃圾识别与采集路径自动规划系统的处理方法;其中,所述的水上漂浮垃圾识别与采集路径自动规划系统包括360
°
广角高清摄像头、微电脑、存储器、陀螺仪、单片机、网络芯片及可旋转螺旋桨;所述360
°
广角高清摄像头位于顶部,用以获取工作区域信息;所述微电脑、存储器、单片机、网络芯片集成与防水保护壳内;所述陀螺仪位于上述结构下方,以保证再系统在水域工况下平稳运行,获取清晰的工作区域信息;所述可旋转螺旋桨作为推进设备,由系统控制,调节设备的运行方向;
6.其处理方法的具体操作步骤如下:
7.(1)、通过360
°
广角高清摄像头获取工作区域图元信息,并通过微电脑进行处理,从而得到水上漂浮垃圾分布信息;
8.(2)、对得到的漂浮垃圾分布信息进行路径规划,并确定收集目标;
9.(3)、通过微电脑计算收集设备与收集目标的方位信息,并通过单片机控制收集设备运行方向和距离,到达收集目标点,进行一次收集工作;
10.(4)、再次使用360
°
广角高清摄像头重新获取工作区域内的图元信息,并开始新一
轮收集工作循环,直至水域内垃圾清理完成。
11.进一步的,在步骤(1)中,所述获取工作区域图元信息并得到水上漂浮垃圾分布信息的具体操作步骤如下:
12.(1.1)、360
°
广角高清摄像头以自身为原点获取工作半径区域圆内的采集区域图片信息,获得图片一;
13.(1.2)、图片一经由微电脑图片处理系统进行预处理,获得图片二;
14.(1.3)、微电脑将图片二按不同介质区域划分,获取预处理图片三;
15.(1.4)、通过微电脑将获取的图片三与存储器中的水介质特征进行对比,并将无法判别的模糊图片信息反馈人为判断、学习,以获取水域(“水介质”)漂浮物识别图图四;
16.(1.5)、再通过微电脑将获取的图片四与存储器中的漂浮垃圾特征进行对比,并将无法判别的模糊图片信息反馈人为判断、学习,以获取漂浮垃圾(“收集垃圾”)分布图图五。
17.进一步的,在步骤(1.4)中,所述获取水域漂浮物识别图图四的具体操作步骤如下:
18.(1.4.1)、微电脑将不同图域介质特征与数据库“水介质”特征进行对比,以判定该域介质属性是否为确定为水,若是,则选择该图域单元;
19.(1.4.2)、若否,则将该图域介质特征与数据库“非水介质”集特征进行对比,进一步判定该图域介质属性一定非水,若是则舍弃该图域,若否则将图片反馈给终端,人为检查是否为水介质,若是,则截取该图域,并保存该图域介质特征至“水介质”特征数据库,通过此步骤排除“岸”、障碍”等非水信息,以组成水上漂浮物识别图的预处理图片四。
20.进一步的,在步骤(1.5)中,所述获取漂浮垃圾分布图图五的具体操作步骤如下:
21.(1.5.1)、预处理图片四通过微电脑与“漂浮物”特征数据库进行对比,以确定图片区域内是否有漂浮物;若否,则证明该区域内无漂浮物(无漂浮垃圾),则将“清理完成”信息传送给终端,结束工作;
22.(1.5.2)、若是则利用微电脑选中漂浮物图块,与数据库中的“收集垃圾”特征进行对比,判定该图块是否为“收集垃圾”,若是则选定该图块单元,若否,则将图块信息传递给终端,人为判断是否为垃圾,若否则舍弃,并“清理完成”信息传送给终端,结束工作;
23.(1.5.3)、若是则选定该图块单元,并将该图片特征存储于“收集垃圾”对比数据库,将选定的图块保留,组成进一步处理的图片五。
24.进一步的,在步骤(2)中,所述对得到的漂浮垃圾分布信息进行路径规划,并确定收集目标的具体操作步骤如下:
25.(2.1)、将得到的图片五经由微电脑进行处理,以收集设备位置为原点,构件坐标系,并获取各垃圾点坐标信息(x,y);
26.(2.2)、通过微电脑计算各垃圾点a与原点距离信息并选择最短距离d(min)的垃圾点;
27.(2.3)、确定收集目标(“收集垃圾”)点。
28.进一步的,在步骤(2.3)中,所述确定收集目标(“收集垃圾”)点的具体操作步骤如下:
29.(2.3.1)、并通过微电脑进一步判定是否存在多个最短距离垃圾点a,若是,则以各
相同d值点为原点,垃圾收集设备工作有效半径为半径,截取图域,通过微电脑计算图域内垃圾点数量,选定拥有垃圾点数量较多的区域的垃圾点a为目标点,并通过该区域点数确定垃圾收集工作t;
30.(2.3.2)、若否,则选定该垃圾点为目标点,并以该点为原点,收集设备工作半径为半径,截取图域,通过微电脑计算图域内垃圾点数量多少,并通过该区域点数确定垃圾收集工作时间t。
31.进一步,在步骤(3)中,所述通过单片机控制收集设备运行方向和距离,到达收集目标点,进行一次收集工作的具体操作步骤如下:
32.(3.1)、通过微电脑处理,计算目前螺旋桨方向与目标点方向夹角,并通过微电脑将数据信息传递至单片机,由单片机控制螺旋桨旋转至与目标点方向重合;
33.(3.2)、单片机控制螺旋桨开关开启,并控制其到达垃圾点a位置;
34.(3.3)、单片机控制垃圾收集设备开启工作电源,工作t时间后,关闭垃圾收集工作电源,完成一个工作周期。
35.进一步的,在步骤(4)中,所述进入新一轮收集工作循环,直至水域内垃圾清理完成的过程如下:再以目前的位置为图片信息获取原点,从第二步“360
°
旋转摄像头收集图片信息获得图片一”再次开始一个工作周期。
36.有益效果:本发明与现有技术相比,本发明将垃圾识别与采集路径自动规划技术应用于水上漂浮垃圾的收集可以很好的解放人力,方便水域垃圾收集工作,以解决海洋、水域漂浮垃圾问题。有很好的经济价值、实用价值和环保意义。
附图说明
37.图1是本发明中水上漂浮垃圾识别与采集系统的结构示意图;
38.图2是本发明的操作流程图;
39.图3是本发明实施例中水介质图域工况图;
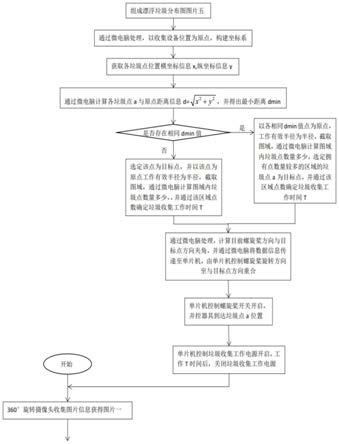
40.图4是本发明实施例中路径优化优选方法示意图。
具体实施方式
41.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
42.如图1所述,本发明所述的一种水上漂浮垃圾识别与采集路径自动规划系统的处理方法;其中,所述水上漂浮垃圾识别与采集路径自动规划系统包括360
°
广角高清摄像头、微电脑、存储器、陀螺仪、单片机、网络芯片及可旋转螺旋桨等,
43.所述结构部分中360
°
广角高清摄像头位于结构顶部,用于获取采集区域图片信息;
44.所述微电脑用于图片的处理及数据对比、运算;
45.所述存储器存储有“水介质”特征信息、“非水介质”集特征信息、“漂浮物”特征信息、“收集垃圾”特征信息等数据库,可维护,添加图片特征数据信息;
46.所述单片机用于接收并处理微电脑传输的信号,以控制可旋转螺旋桨转动以及螺旋桨、收集设备工作电源的开关;
47.所述360
°
广角高清摄像头、微电脑、存储器、单片机、网络芯片组成智能识别规划系统,微电脑、存储器、单片机、网络芯片至于防水控制盒内,与360
°
广角高清摄像头共同组成控制云台;
48.所述陀螺仪为小型陀螺仪,置于控制云台下端,以保证图像信息及处理过程的稳定性;
49.所述可旋转螺旋桨位于收集设备侧部,有连杆及加强筋连接,用于控制设备运行方向。
50.所述360
°
广角高清摄像头以自身为原点获取工作半径区域圆内的采集区域图片信息,获得图片一;所述图片一由微电脑图片处理系统进行预处理,获得图片二;
51.如图2所述,本发明处理方法的具体操作步骤如下:
52.(1)、通过360
°
广角高清摄像头获取工作区域图元信息,并通过微电脑进行处理,从而得到水上漂浮垃圾分布信息;
53.(2)、对得到的漂浮垃圾分布信息进行路径规划,并确定收集目标;
54.(3)、通过微电脑计算收集设备与收集目标的方位信息,并通过单片机控制收集设备运行方向和距离,到达收集目标点,进行一次收集工作;
55.(4)、再次使用360
°
广角高清摄像头重新获取工作区域内的图元信息,并开始新一轮收集工作循环,直至水域内垃圾清理完成。
56.进一步的,在步骤(1)中,所述获取工作区域图元信息并得到水上漂浮垃圾分布信息的具体操作步骤如下:
57.(1.1)、360
°
广角高清摄像头以自身为原点获取工作半径区域圆内的采集区域图片信息,获得图片一;
58.(1.2)、图片一经由微电脑图片处理系统进行预处理,获得图片二;
59.(1.3)、微电脑将图片二按不同介质区域划分,获取预处理图片三;
60.(1.4)、通过微电脑将获取的图片三与存储器中的水介质特征进行对比,并将无法判别的模糊图片信息反馈人为判断、学习,以获取水域(“水介质”)漂浮物识别图图四;
61.(1.5)、再通过微电脑将获取的图片四与存储器中的漂浮垃圾特征进行对比,并将无法判别的模糊图片信息反馈人为判断、学习,以获取漂浮垃圾(“收集垃圾”)分布图图五。
62.进一步的,在步骤(1.4)中,所述获取水域漂浮物识别图图四的具体操作步骤如下:
63.(1.4.1)、微电脑将不同图域介质特征与数据库“水介质”特征进行对比,以判定该域介质属性是否为确定为水,若是,则选择该图域单元;
64.(1.4.2)、若否,则将该图域介质特征与数据库“非水介质”集特征进行对比,进一步判定该图域介质属性一定非水,若是则舍弃该图域,若否则将图片反馈给终端,人为检查是否为水介质,若是,则截取该图域,并保存该图域介质特征至“水介质”特征数据库,通过此步骤排除“岸”、障碍”等非水信息,以组成水上漂浮物识别图的预处理图片四。
65.进一步的,在步骤(1.5)中,所述获取漂浮垃圾分布图图五的具体操作步骤如下:
66.(1.5.1)、预处理图片四通过微电脑与“漂浮物”特征数据库进行对比,以确定图片区域内是否有漂浮物;若否,则证明该区域内无漂浮物(无漂浮垃圾),则将“清理完成”信息传送给终端,结束工作;
67.(1.5.2)、若是则利用微电脑选中漂浮物图块,与数据库中的“收集垃圾”特征进行对比,判定该图块是否为“收集垃圾”,若是则选定该图块单元,若否,则将图块信息传递给终端,人为判断是否为垃圾,若否则舍弃,并“清理完成”信息传送给终端,结束工作;
68.(1.5.3)、若是则选定该图块单元,并将该图片特征存储于“收集垃圾”对比数据库,将选定的图块保留,组成进一步处理的图片五。
69.进一步的,在步骤(2)中,所述对得到的漂浮垃圾分布信息进行路径规划,并确定收集目标的具体操作步骤如下:
70.(2.1)、将得到的图片五经由微电脑进行处理,以收集设备位置为原点,构件坐标系,并获取各垃圾点坐标信息(x,y);
71.(2.2)、通过微电脑计算各垃圾点a与原点距离信息并选择最短距离d(min)的垃圾点;
72.(2.3)、确定收集目标(“收集垃圾”)点。
73.进一步的,在步骤(2.3)中,所述确定收集目标(“收集垃圾”)点的具体操作步骤如下:
74.(2.3.1)、并通过微电脑进一步判定是否存在多个最短距离垃圾点a,若是,则以各相同d值点为原点,垃圾收集设备工作有效半径为半径,截取图域,通过微电脑计算图域内垃圾点数量,选定拥有垃圾点数量较多的区域的垃圾点a为目标点,并通过该区域点数确定垃圾收集工作t;
75.(2.3.2)、若否,则选定该垃圾点为目标点,并以该点为原点,收集设备工作半径为半径,截取图域,通过微电脑计算图域内垃圾点数量多少,并通过该区域点数确定垃圾收集工作时间t。
76.进一步,在步骤(3)中,所述通过单片机控制收集设备运行方向和距离,到达收集目标点,进行一次收集工作的具体操作步骤如下:
77.(3.1)、通过微电脑处理,计算目前螺旋桨方向与目标点方向夹角,并通过微电脑将数据信息传递至单片机,由单片机控制螺旋桨旋转至与目标点方向重合;
78.(3.2)、单片机控制螺旋桨开关开启,并控制其到达垃圾点a位置;
79.(3.3)、单片机控制垃圾收集设备开启工作电源,工作t时间后,关闭垃圾收集工作电源,完成一个工作周期。
80.进一步的,在步骤(4)中,所述进入新一轮收集工作循环,直至水域内垃圾清理完成的过程如下:再以目前的位置为图片信息获取原点,从第二步“360
°
旋转摄像头收集图片信息获得图片一”再次开始一个工作周期。
81.如图3所述,所述微电脑将图片二按不同介质区域划分,获取预处理图片三;所述微电脑将不同图域介质特征与数据库“水介质”特征进行对比,以判定该域介质属性是否为确定为水,若是则选择该图域单元,若否则将该图域介质特征与数据库“非水介质”集特征进行对比,进一步判定该图域介质属性一定非水,若是则舍弃该图域,若否则将图片反馈该终端,人为检查是否为水,若是,则截取该图域,并保存该图域介质特征至“水介质”特征数据库,通过此步骤排除“岸”、障碍”等非水信息,以组成水上漂浮物识别图的预处理图片四;
82.所述预处理图片四通过微电脑与“漂浮物”特征数据库进行对比,以确定图片区域
内是否有漂浮物;若否,则证明该区域内无漂浮物(无漂浮垃圾),则将“清理完成“信息传送给终端,结束工作;若是则利用微电脑选中漂浮物图块,与数据库中的“收集垃圾”特征进行对比,判定该图块是否为“收集垃圾”,若是则选定该图块单元,若否,则将图块信息传递给终端,人为判断是否为垃圾,若否则舍弃,将“清理完成“信息传送给终端,结束工作;若是则选定该图块单元,并将该图片特征存储于“收集垃圾”对比数据库,将选定的图块保留,组成进一步处理的图片五;
83.如图3所示,介绍四种水域工况的识别实例:
84.实施例1,当工况为全水域工况(江河、湖泊的中心地带,无水上障碍物等)时,步骤1第4步所提取水域(“介质”)图元信息全部为“水介质”,与微电脑数据库“水介质”特征对比后,输出判断为“是”,将截取整个图元;
85.实施例2,当工况为河道、峡口工况(水域为条状,水道两侧有岸等障碍物工况)时,步骤1第4步所提取水域(“介质”)图元信息分为“水介质”,与微电脑数据库“水介质”特征对比后,先截取确定为水介质的图域单元,将模糊信息(非水介质)进一步评判,先舍弃确定的“一定非水”图域单元,再将模糊信息(可能非水)人为评判,并存储特征,进行学习,最终获得确切的图四(水上漂浮物)图域;
86.实施例3,当工况为海岸工况(为靠岸工况,仅一侧有岸等障碍物)时,步骤1第4步所提取水域(“介质”)图元信息分为“水介质”,与微电脑数据库“水介质”特征对比后,先截取确定为水介质的图域单元,将模糊信息(非水介质)进一步评判,先舍弃确定的“一定非水”图域单元,再将模糊信息(可能非水)人为评判,并存储特征,进行学习,最终获得确切的图四(水上漂浮物)图域;
87.实施例4,屿见、水流汇集处工况(为四周有岸等障碍物)时,步骤1第4步所提取水域(“介质”)图元信息分为“水介质”,与微电脑数据库“水介质”特征对比后,先截取确定为水介质的图域单元,将模糊信息(非水介质)进一步评判,先舍弃确定的“一定非水”图域单元,再将模糊信息(可能非水)人为评判,并存储特征,进行学习,最终获得确切的图四(水上漂浮物)图域。
88.如图4所示,所述图片五通过微电脑进行处理,以收集设备位置为原点,构件坐标系,并获取各垃圾点坐标信息(x,y),通过微电脑计算各垃圾点a与原点距离信息并选择最短距离d(min)的垃圾点,并通过微电脑进一步判定是否存在多个最短距离垃圾点a,若是,则以各相同d值点为原点,垃圾收集设备工作有效半径为半径,截取图域,通过微电脑计算图域内垃圾点数量,选定拥有垃圾点数量较多的区域的垃圾点a为目标点,并通过该区域点数确定垃圾收集工作t;若否,则选定该垃圾点为目标点,并以该点为原点,收集设备工作半径为半径,截取图域,通过微电脑计算图域内垃圾点数量多少,并通过该区域点数确定垃圾收集工作时间t;通过微电脑处理,计算目前螺旋桨方向与目标点方向夹角,并通过微电脑将数据信息传递至单片机,由单片机控制螺旋桨旋转至与目标点方向重合;再由单片机控制螺旋桨开关开启,并控制其到达垃圾点a位置;再由单片机控制垃圾收集设备开启工作电源,工作t时间后,关闭垃圾收集工作电源,完成一个工作周期;再以目前的位置为图片信息获取原点,从第二步“360
°
旋转摄像头收集图片信息获得图片一”再次开始一个工作周期。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

