1.本实用新型涉及钻进设备技术领域,具体的,涉及一种锚杆钻车与掘进机作业一体化系统。
背景技术:
2.煤炭是我国的主要能源之一,我国煤矿主要是地下开采,需要在井下开掘大量巷道,采用巷道支护来保持巷道畅通和围岩稳定对煤矿建设与生产具有重要意义,是采煤工艺中重要的一环,现有的锚护工艺大多为人工操作便携式锚杆钻车进行锚护作业,需要多人进行操作,效率低,劳动强度大,市面上也有一些大型锚护设备,但由于巷道空间受限,大型锚护设备无法与掘进机共同使用、平行作业,也影响了锚护作业的效率,而随着经济社会的发展和科学技术的进步,我国对煤炭资源开采步伐的日益加快,对巷道支护作业也提出了更高的要求。
技术实现要素:
3.本实用新型提出了一种锚杆钻车与掘进机作业一体化系统,解决了现有技术中的巷道掘进锚杆钻车与掘进机无法同时作业,影响掘进效率的问题。
4.本实用新型的技术方案如下:
5.一种锚杆钻车与掘进机作业一体化系统,包括锚杆钻车与掘进机,
6.所述锚杆钻车包括:
7.车体,所述车体包括两个支撑梁和设置在两个所述支撑梁上的横梁,
8.行走机构,两个所述支撑梁的底部均设有行走机构,
9.锚钻部,设置在两个所述支撑梁的前端,
10.两个所述支撑梁及其上的所述行走机构、所述横梁和所述锚钻部形成作业通道;
11.所述掘进机在所述作业通道内运动,所述掘进机通过连接装置与所述锚杆钻车连接,所述连接装置包括:
12.第一轨道,设置在所述掘进机上,沿第一方向设置;
13.第二轨道,设置在所述锚杆钻车上,沿第二方向设置;
14.连接臂,其上设有第一滑动件和第二滑动件,所述第一滑动件滑动设置在所述第一轨道上,所述第二滑动件滑动设置在所述第二轨道上;
15.第一测距装置,用于检测所述第一滑动件在所述第一轨道上滑动的距离;
16.第二测距装置,用于检测所述第二滑动件在所述第二轨道上滑动的距离。
17.进一步,所述连接臂上滑动设置有缓冲块,并设有第一弹性件提供使所述缓冲块靠近所述掘进机的弹力,所述第一滑动件为滚轮,转动设置在所述缓冲块上,所述滚轮沿所述第一轨道滚动;
18.所述第一测距装置为旋转编码器,其输入端与所述滚轮同轴设置。
19.进一步,还包括第二弹性件和第三弹性件,用于提供所述第二滑动件沿第二轨道
滑动的弹力,所述第二弹性件和所述第三弹性件提供相反的力;
20.所述第二测距装置为拉绳编码器,所述拉绳编码器设置在锚杆钻车上,其拉绳与所述第二滑动件连接。
21.进一步,所述锚钻部包括:
22.滑架,为两个,两个所述滑架分别设置在两个所述支撑梁的前端;
23.锚钻架,沿第三方向可滑动设置在两个所述滑架之间;
24.移动座,沿第二方向可滑动设置在所述锚钻架上;
25.转动座,可转动设置在所述移动座上;
26.钻进机构,设置在所述转动座上。
27.进一步,所述锚钻部还包括:
28.升降座,沿第三方向滑动设置在所述滑架上,所述锚钻架设置在所述升降座上,
29.第一位移油缸,设置在所述滑架上,所述第一位移油缸的活塞杆与所述升降座连接;
30.链轮,设置在所述第一位移油缸的活塞杆上,
31.链条,一端设置在所述滑架上,另一端绕过所述链轮设置在所述升降座上;
32.第二位移油缸,所述第二位移油缸设置在所述锚钻架上,其活塞杆与所述移动座连接;
33.旋转油缸,所述旋转油缸设置在所述移动座上,所述转动座与所述转动座的输出端连接。
34.进一步,所述第二位移油缸、所述第一位移油缸上均设有位移测量装置,所述旋转油缸上设有旋转测量装置。
35.进一步,所述锚钻部还包括:
36.顶锚支架,沿第三方向滑动设置在所述滑架上;
37.上网架,沿第一方向滑动设置在所述顶锚支架上,其上部设有多个限位柱;
38.支护油缸,设置在所述滑架上,其活塞杆与所述顶锚支架连接。
39.进一步,所述钻进机构包括:
40.第一钻进座,设在所述转动座上,其上设有第一轨道;
41.第二钻进座,滑动设置在所述第一钻进座上,沿所述第一轨道滑动,其上设有与所述第一轨道平行的第二轨道;
42.油马达,滑动设置在所述第二钻进座上,沿所述第二轨道滑动;
43.第一钻进油缸,设置在所述第一钻进座,其活塞杆与所述第二钻进座连接;
44.第二钻进油缸,设置在所述第二钻进座上,其活塞杆与所述油马达连接。
45.进一步,还包括视觉系统,设置在所述车体沿第二方向的中部,包括,激光发生器、摄像机和与所述摄像机相连的数据处理模块。
46.进一步,还包括测距系统,包括四个测距装置,四个所述测距装置两两一组,分别设置在所述车体的两侧,每组中的两个所述测距装置沿长度方向依次设置在锚杆钻车上,所述测距装置包括:
47.固定座,设置在锚杆钻车的侧壁上,其上设有滑轨;
48.滑块,沿所述滑轨滑动设置在所述固定座上;
49.折叠臂,包括相互铰接的第一转动臂和第二转动臂,所述第一转动臂与所述固定座铰接,所述第二转动臂与所述滑块铰接;
50.拉簧,提供使所述第一转动臂与所述第二转动臂靠近的弹力;
51.滑动测量装置,用于测量所述滑动的滑动位移。
52.本实用新型的工作原理及有益效果为:
53.本实用新型中,将锚杆钻车的车体设计为由两个分离的支撑梁支撑横梁的跨式结构,并在两个支撑梁的底部分别设置行走机构,锚钻部设计在两个支撑梁的前端,使锚杆钻车能够形成一个供掘进机通过的作业通道,掘进机通过连接装置设置在作业通道内,在进行巷道开掘作业时,可以实现掘进机、锚杆钻车交替前进,平行作业,不需要频繁进行错车,避免掘进机与锚杆钻车相互影响,节约了开掘工序与锚护工序的切换时间,提升了整体的工作效率。
54.锚杆钻车与掘进机间通过连接臂连接,其中连接臂的一端设置有在掘进机上的第一轨道上滑动的第一滑动件,另一端设置有在锚杆钻车上的第二轨道上滑动的第二滑动件,在进行巷道开掘作业时,掘进机与锚杆钻车交替前进,分别进行掘进工序和锚护工序,通过第一测距装置测量第一滑动件在第一轨道上滑动的距离控制掘进机与锚杆钻车每次的前进距离使二者可以交替作业,通过第二测距装置测量第二滑动件在第二轨道上滑动的距离来保证锚杆钻进与掘进机在宽度方向上的相对位置保持不变,实现在巷道开掘过程中锚杆钻车与掘进机平行作业。
附图说明
55.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
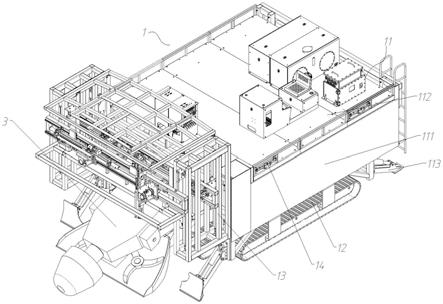
56.图1为本实用新型结构示意图;
57.图2为锚杆钻车前视图;
58.图3为锚杆钻车仰视图;
59.图4为掘进机结构示意图;
60.图5为连接装置结构示意图;
61.图6为锚钻部结构示意图;
62.图7为滑架结构示意图;
63.图8为锚钻架结构示意图;
64.图9为钻进机构结构示意图;
65.图10为测距装置结构示意图;
66.图11为锚护网结构示意图;
67.图中:1锚杆钻车,11车体,111支撑梁,112横梁,113支腿,12行走机构,13锚钻部, 1301滑架,1302锚钻架,1303移动座,1304转动座,1305钻进机构,13051第一钻进座, 13052第二钻进座,13053油马达,13054第一钻进油缸,13055第二钻进油缸,1306升降座, 1307第一位移油缸,1308链轮,1309链条,1310第二位移油缸,1311旋转油缸,1312位移测量装置,1313旋转测量装置,1314顶锚支架,1315上网架,1316限位柱,1317支护油缸, 14测距系统,1401固定座,1402滑块,1403第一转动臂,1404第二转动臂,1405拉簧,1406 滑动测量装置,1407导轮,15作业通道,2连接装置,21第一轨道,22第二轨道,23连接臂,24缓冲块,25第一
滑动件,26第二滑动件,27第一测距装置,28第二测距装置,29第一弹性件,210第二弹性件,211第三弹性件,3掘进机,4锚护网,41金属网,42钢带,43 定位孔。
具体实施方式
68.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都涉及本实用新型保护的范围。
69.如图1~图11所示,本实施例提出了
70.一种锚杆钻车1与掘进机3作业一体化系统,包括锚杆钻车1与掘进机3,
71.锚杆钻车1包括:
72.车体11,车体11包括两个支撑梁111和设置在两个支撑梁111上的横梁112,
73.行走机构12,两个支撑梁111的底部均设有行走机构12,
74.锚钻部13,设置在两个支撑梁111的前端,
75.两个支撑梁111及其上的行走机构12、横梁112和锚钻部13形成作业通道15;
76.掘进机3在作业通道15内运动,掘进机3通过连接装置2与锚杆钻车1连接,连接装置 2包括:
77.第一轨道21,设置在掘进机3上,沿第一方向设置;
78.第二轨道22,设置在锚杆钻车上,沿第二方向设置;
79.连接臂23,其上设有第一滑动件25和第二滑动件26,第一滑动件25滑动设置在第一轨道21上,第二滑动件26滑动设置在第二轨道22上;
80.第一测距装置27,用于检测第一滑动件25在第一轨道21上滑动的距离;
81.第二测距装置28,用于检测第二滑动件26在第二轨道22上滑动的距离。
82.可以定义第一方向为锚杆钻车1的长度方向,第二方向为锚杆钻车1的宽度方向,第三方向为锚杆钻车1的高度方向。
83.将锚杆钻车1的车体11设计为由两个分离的支撑梁111支撑横梁112的跨式结构,并在两个支撑梁111的底部分别设置行走机构12,锚钻部13设计在两个支撑梁111的前端,使锚杆钻车1能够形成一个供掘进机3通过的作业通道15,掘进机3通过连接装置2设置在作业通道15内,在进行巷道开掘作业时,可以实现掘进机3、锚杆钻车1交替前进,平行作业,不需要频繁进行错车,避免掘进机3与锚杆钻车1相互影响,节约了开掘工序与锚护工序的切换时间,提升了整体的工作效率。
84.锚杆钻车1与掘进机3间通过连接臂23连接,其中连接臂23的一端设置有在掘进机3 上的第一轨道21上滑动的第一滑动件25,另一端设置有在锚杆钻车1上的第二轨道22上滑动的第二滑动件26,在进行巷道开掘作业时,掘进机3与锚杆钻车1交替前进,分别进行掘进工序和锚护工序,通过第一测距装置27测量第一滑动件25在第一轨道21上滑动的距离控制掘进机3与锚杆钻车1每次的前进距离使二者可以交替作业,通过第二测距装置28测量第二滑动件26在第二轨道22上滑动的距离来保证锚杆钻进与掘进机3在宽度方向上的相对位置保持不变,实现在巷道开掘过程中锚杆钻车1与掘进机3平行作业。
85.行走机构12可以采用履带行走机构12,适用于巷道环境,更加稳定。
86.两个支撑梁111的底部还设有支腿113,在锚护作业时起到支腿113落下,起到支撑作用,保证锚杆钻车1的稳定。
87.连接臂23上滑动设置有缓冲块24,并设有第一弹性件29提供使缓冲块24靠近掘进机的弹力,第一滑动件25为滚轮,转动设置在缓冲块24上,滚轮沿第一轨道21滚动;
88.第一测距装置27为旋转编码器,其输入端与滚轮同轴设置。
89.缓冲块24在连接臂23上滑动设置,沿锚杆钻车1的高度方向滑动,第一滑动件25设置在缓冲块24上,可以保证掘进机3与锚杆钻车1在高度方向上相对位置发生变化时不会损坏装置。
90.由于前后方向的移动为掘进机3与锚杆钻车1间主要的相对位移,第一滑动件25采用滚轮,减小滑动摩擦,提升装置稳定性和使用寿命,采用旋转编码器测量滚轮的转动角度,以此来获取位移的距离。
91.采用旋转编码器测量滚轮的转动角度来获取位移的距离,需要保证在锚杆钻车1与掘进机3移动时,滚轮始终处于转动状态,第一弹性件29可以采用弹簧,设置在连接臂23的一端与缓冲块24之间,通过弹簧的弹力向下压缓冲块24,保证滚轮与第一轨道21的接触,保证其滚动,保证测量的准确性。
92.还包括第二弹性件210和第三弹性件211,用于提供第二滑动件26沿第二轨道22滑动的弹力,第二弹性件210和第三弹性件211提供相反的力;
93.第二测距装置28为拉绳编码器,拉绳编码器设置在锚杆钻车1上,其拉绳与第二滑动件 26连接。
94.宽度方向上的位移并非锚杆钻车1与掘进机3间的主要位移方向,而是通过测量得到的位移数据控制二者在宽度方向上的相对位置不变,可以直接采用滑动的方式,通过第二弹性件210和第三弹性件211为第二滑动件26在第二轨道22上滑动提供缓冲,并使用拉绳编码器来测量第二滑动件26的位移,测量方便准确。通过第二弹性件210和第三弹性件211为第二滑动件26在第二轨道22上滑动提供缓冲。
95.锚钻部13包括:
96.滑架1301,为两个,两个滑架1301分别设置在两个支撑梁111的前端;
97.锚钻架1302,沿第三方向可滑动设置在两个滑架1301之间;
98.移动座1303,沿第二方向可滑动设置在锚钻架1302上;
99.转动座1304,可转动设置在移动座1303上;
100.钻进机构1305,设置在转动座1304上。
101.锚钻部13可以在一平面内巷道侧壁和顶部的任意位置进行锚护作业,通过转动座1304 在移动座1303上的转动可以调整钻进机构1305的朝向,使其朝向巷道侧壁或巷道顶部,在钻进机构1305朝向巷道侧壁时,锚钻架1302在滑架1301上的升降可以调节钻进机构1305 在高度上的位置,使其可以在巷道侧壁上任意位置进行锚护,在钻进机构1305朝向巷道顶壁时,移动座1303在锚钻架1302上左右平移可以调整钻进机构1305在宽度方向上的位置,使其可以在巷道顶部任意位置进行锚护。
102.在滑架1301上设有前后两个锚钻架1302,每个锚钻架1302上设有两个移动座1303,每个移动座1303上均设有钻进机构1305,可以同时对两个平面进行锚护作业,在巷道的两侧、顶部同时进行锚护作业,提升整体的作业效率。
103.锚钻部13还包括:
104.升降座1306,沿第三方向滑动设置在滑架1301上,锚钻架1302设置在升降座1306上;
105.第一位移油缸1307,设置在滑架1301上,第一位移油缸1307的活塞杆与升降座1306 连接;
106.链轮1308,设置在第一位移油缸1307的活塞杆上,
107.链条1309,一端设置在滑架1301上,另一端绕过链轮1308设置在升降座1306上。
108.第二位移油缸1310,第二位移油缸1310设置在锚钻架1302上,其活塞杆与移动座1303 连接。
109.旋转油缸1311,旋转油缸1311设置在移动座1303上,转动座1304与转动座的输出端连接。
110.第一位移油缸1307的活塞杆上设置有链轮1308,链条1309的两端分别与升降座1306 和滑架1301连接,并且链条1309与链轮1308的上部啮合,通过第一位移油缸1307带动链轮1308升降,从而带动升降座1306升降,带动设置在升降座1306上的锚钻架1302进行升降。
111.通过第二位移油缸1310带动移动座1303在锚钻架1302上平移,通过旋转油缸1311带动转动座1304在移动座1303上转动,以实现在一个平面内各位置的锚护作业。
112.第二位移油缸1310、第一位移油缸1307上均设有位移测量装置1312,旋转油缸1311上设有旋转测量装置1313。
113.位移测量装置1312可以采用拉绳编码器,将拉绳编码器设置在油缸上,其拉绳设置在油缸的活塞杆上,通过位移拉绳编码器测量油缸活塞杆的伸缩长度,并能以此测算出钻进机构 1305的当前位置,以此可以准确的调整钻进机构1305到达预定的锚护位置,方便锚护作业时的精准定位。
114.旋转测量装置1313可以采用旋转编码器,通过旋转编码器可以获得旋转油缸1311驱动转动座1304转动的角位移,以此得到钻进机构1305的朝向,方便钻进机构1305朝向的精准控制。
115.锚钻部13还包括:
116.顶锚支架1314,沿第三方向滑动设置在滑架1301上;
117.上网架1315,沿第一方向滑动设置在顶锚支架1314上,其上部设有多个限位柱1316;
118.支护油缸1317,设置在滑架1301上,其活塞杆与顶锚支架1314连接。
119.在对巷道顶部进行支护时,通过可以沿锚杆钻车1长度方向滑动的上网架1315可以方便的将锚护网4从后方运送到顶锚支架1314上,限位柱1316起到锚护网4定位的作用,保证锚护网4放在上网架1315的特定位置,然后通过支护油缸1317带动顶锚支架1314向上运动,运动到位后支护油缸1317停止运动,然后由钻进机构1305在巷道顶部打锚杆。
120.锚护网4由金属网41和钢带42组成,在钢带42上预先钻有定位孔43,锚护网4在上网架1315上放置到位后,通过程序控制钻进机构1305翻转、移动,通过位移拉绳编码器、旋转编码器实时获取钻进机构1305的位置,可以精准的将钻进机构1305停在定位孔43的位置,精准钻进。
121.钻进机构1305包括:
122.第一钻进座13051,设在转动座1304上,其上设有第一轨道21;
123.第二钻进座13052,滑动设置在第一钻进座13051上,沿第一轨道21滑动,其上设有与第一轨道21平行的第二轨道22;
124.油马达13053,滑动设置在第二钻进座13052上,沿第二轨道22滑动;
125.第一钻进油缸13054,设置在第一钻进座13051,其活塞杆与第二钻进座13052连接;
126.第二钻进油缸13055,设置在第二钻进座13052上,其活塞杆与油马达13053连接。
127.在进行锚护作业时,通过油马达13053带动钻杆或锚杆转动,第二钻进油缸13055带动油马达13053向钻进方向运动,从而实现钻孔或打锚杆作业,第一钻进油缸13054可以带动第二钻进座13052在第一钻进座13051上滑动,可以增加锚护作业在宽度上的范围,适用于更宽的巷道。
128.还包括视觉系统,设置在车体11沿第二方向的中部,包括,激光发生器、摄像机和与摄像机相连的数据处理模块。
129.为保证锚杆钻车1在巷道内的前进方向,使其与掘进机3完美配合,通过设置视觉系统进行导向,来控制锚杆钻车1的前进方向,使得锚杆钻车1前进的大方向不出偏差,激光发射器设置在锚杆钻车1沿宽度方向的中间位置,向掘进面发射激光,在掘进面上产生激光点,锚杆钻车1处于正确的行驶方向时,激光点会位于巷道的中线上,锚杆钻车1的前进方向发生偏差时,激光点也会从巷道的中线向两侧偏移,摄像机采集掘进面上的激光点,通过数据处理模块计算出激光点的相对位置,从而确定锚杆钻车1的当前位置、方向,指导锚杆钻车 1按正确的方向前进。
130.在锚杆钻车1的两侧设置测距系统14,来检测锚杆钻车1与巷道侧壁间的距离,用来精准导向,通过视觉系统和测距系统14配合以实现锚杆钻车1前进方向的精确控制,测距系统 14包括四个测距装置,四个测距装置两两一组,分别设置在车体11的两侧,每组中的两个测距装置沿长度方向依次设置在锚杆钻车1上,测距装置测量其安装位置与巷道侧壁的间距,通过分析处理所获得的距离参数对锚杆钻车1前进方向进行适时调整,配合视觉系统精准控制锚杆钻车1的前进方向。
131.可以采用超声波传感器、光电传感器等方式测量锚杆钻车1与巷道侧壁的间距,但由于巷道内情况复杂,杂物、粪车较大,容易将传感器采集部污浊,影响传感器工作,而传感器的更换又比较麻烦,因此优选借助机械结构来实现精确的实时测距,在一种实施方式中,
132.测距装置包括:
133.固定座1401,设置在锚杆钻车1的侧壁上,其上设有滑轨;
134.滑块1402,沿滑轨滑动设置在固定座1401上;
135.折叠臂,包括相互铰接的第一转动臂1403和第二转动臂1404,第一转动臂1403与固定座1401铰接,第二转动臂1404与滑块1402铰接;
136.弹性件,提供使第一转动臂1403与第二转动臂1404靠近的弹力;
137.测距拉绳编码器,设置在滑块1402上,编码器的拉线端部固定与固定座1401上。
138.锚杆钻车1在巷道内时,巷道的侧壁压在折叠臂的第一转动臂1403和第二转动臂1404 的铰接处,使折叠臂向内压缩,通过编码器可以获得滑块1402移动的距离,将测量锚
杆钻车 1与巷道侧壁间距利用上述结构转换为测量滑块1402的移动距离,更加方便测量,测量也更加准确,可以准确获得锚杆钻车1在前进过程中与侧壁间的距离的实时变化,为调整锚杆钻车1前进方向提供数据支撑。
139.其中弹性件可以采用拉簧1405,设置在折叠臂之间。
140.测距装置还包括:
141.导轮1407,设置在所示第一转动臂1403与第二转动臂1404的铰接处。
142.导轮1407与巷道侧壁接触,随锚杆钻车1前进在侧壁上滚动。
143.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

