1.本发明涉及激光扫描领域,尤其是涉及一种适用于旋轴激光雷达的优化方法。
背景技术:
2.随着自动化和三维激光扫描技术的发展,社会各界对于大视界、长距离、高分辨率的三维激光自动化技术的需求越来越广泛。为了克服传统激光雷达技术有限的激光扫描线束造成的分辨率局限性,为激光雷达外部增加的旋转轴成为了激光雷达三维扫描成像领域中一条高效可靠的技术路线。
3.增加外部旋轴的技术手段是采用在外部增加步进电机控制器的方式旋转激光雷达,增加了激光雷达的一个自由度,能够有效的增加其视场角和分辨率,提高其在三维扫描中的效率和分辨率,扩大其应用场景。
4.旋轴激光雷达由于其自身重力的影响,为连接其上的步进电机的电机轴带来了转动惯量的影响,增加了力矩扰动,增加了点云畸变的来源。力矩扰动增加的点云畸变是指激光雷达在旋转的时候,由重力对旋转的角度和到达目标角度的速率的影响带来的点云帧位姿偏差,从而造成的点云成像的扭曲或断裂等现象。其中点云帧是激光雷达输出的基本数据帧,点云成像是根据激光雷达点云帧和其对应的位姿信息成像而来。
5.点云帧的位姿由世界坐标系中的旋轴激光雷达装置位姿和步进电机带动激光雷达旋转的角度共同得到。
6.旋轴激光雷达扫描成像的结果是采用扫描期间的多点云帧进行配准得到,在点云帧的逐帧配准过程中会引入累积误差,与传统激光雷达点云帧的累积误差相比多了力矩扰动带来的影响。
7.回环检测是现有的消除累积误差的一种有效的算法,回环检测指的是在检测到重复扫描同一环境的时候认为是一个回环并对位姿进行优化,通过消除一定程度上的累积误差提高扫描的质量。
8.当前优化算法的研究和应用主要利用点云数据进行优化,旋轴激光雷达力矩扰动带来的累积误差与传统雷达扫描的累积误差相比具有周期性的特点,难以直接应用。
技术实现要素:
9.本发明用于解决旋轴激光雷达由于重力造成的力矩扰动而带来的成像畸变问题。本发明针对畸变的来源,创新性的提出了一种适用于旋轴激光雷达的优化方法,根据趋向参数,对点云帧所对应的位姿进行自适应放缩然后进行优化。有效的填补了旋轴激光雷达其中的一项短板,提高了旋轴雷达的适用性和扫描精度,减小了点云三维成像和点云地图构建中的畸变。
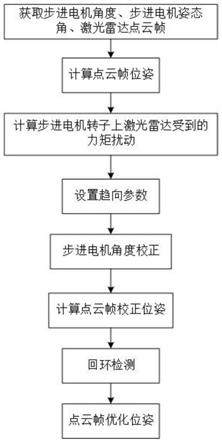
10.本发明的技术解决方案是:一种适用于旋轴激光雷达的优化方法,包括以下步骤:
11.s1旋轴激光雷达利用步进电机带动激光雷达旋转扫描获得环境扫描数据,包括激光雷达点云帧、步进电机角度、步进电机位姿。
12.s2根据步进电机位姿、步进电机角度和激光雷达的固定位置,计算激光雷达点云帧的位姿,并结合激光雷达自身所受的重力和重心位置计算步进电机的电机轴所受到的力矩扰动。
13.s3根据力矩扰动、步进电机角度设置趋向参数,具体的,所设置趋向参数的数值与力矩扰动的数值线性相关,所设置趋向参数的符号与力矩扰动的数值的变化方向对应。
14.s4根据趋向参数对步进电机角度进行校正,并重新根据步进电机位姿、校正后的步进电机角度和激光雷达的固定位置计算激光雷达点云帧校正位姿。最后根据回环检测算法优化点云帧校正位姿,获得点云帧优化位姿。
15.所述旋轴激光雷达设备通过步进电机的电机轴与激光雷达连接,电机轴的轴向垂直于激光雷达内部旋转的轴线。
16.所述步进电机与惯性导航元件固定连接。
17.所述步进电机位姿由惯性导航元件数据计算得到,所述激光雷达点云帧、步进电机角度、步进电机位姿时间对齐。
18.所述s3,包括:
19.通过计算单元将此时刻下的点云帧、步进电机角度、所解算出的力矩扰动时间对齐,并根据力矩扰动的数值设置趋向参数的数值。根据下一时刻与当前时刻力矩扰动的增量对设置趋向参数的符号,增量为正则对趋向参数赋予正符号,增量为负则对趋向参数赋予负符号。
20.所述s4,包括:
21.具体为对趋向参数符号为正的点云帧所对应的步进电机角度进行收缩优化,对趋向参数符号为负的点云帧所对应的步进电机角度进行拉伸优化。所述的拉伸和收缩的系数与力矩扰动的数值和步进电机的转速乘积线性相关。
22.本发明与现有技术相比的有益效果是:
23.本发明根据由步进电机求取到了力矩扰动和转速,设置动态的趋向参数,并根据趋向参数对激光雷达点云帧对应的步进电机角度自适应缩放以校正点云帧位姿,最后通过回环检测算法对校正后的激光雷达点云帧所对应的位姿进行优化,能够有效优化旋轴激光雷达的三维扫描地图的畸变,进而提高了旋轴激光雷达三维扫描和建图的质量。
附图说明
24.图1是本发明方法的流程图。
25.图2是旋轴激光雷达工作方式示意图。
26.图3是校正与回环检测优化的示意图。
具体实施方式
27.下面结合附图对本发明的具体实施方式进行进一步的详细描述。
28.为了优化由旋轴激光雷达在外部旋转轴旋转时所受到的力矩扰动造成的扫描点云畸变,本发明提供了一种适用于旋轴激光雷达的优化方法,具体实施如下:
29.在本实施例中,采用手持的旋轴激光雷达,如图2所示,进行5次扫描测试,扫描对象为长贯通走廊中悬挂的三个圆球,其直径分别为18cm,15cm,23cm。
30.扫描方式采用将旋轴激光雷达围绕圆球上下前后左右做三次往复运动,以扫描出整体圆球的形状。
31.旋轴激光雷达中的激光雷达通过步进电机的电机轴轴与激光雷达连接,电机轴的轴向垂直于激光雷达内部轴线,步进电机与惯性导航元件固定连接。本实施例中旋轴激光雷达搭载的激光雷达在安装前经过预校准,激光雷达中心与其重心位置重合。步进电机重心的在步进电机的电机轴所在的直线上。
32.本发明的优化方法流程如图1所示。
33.第一步,通过步进电机带动激光雷达旋转扫描标准圆球的几何信息,获得激光雷达点云帧、当前时刻步进电机角度ω、步进电机位姿t
r
。其中步进电机位姿由惯性导航元件数据计算并根据惯性导航元件与步进电机重心的空间位置转换得到,使用转移矩阵t
r
表示。
34.第二步,首先根据步进电机位姿t
r
中的旋转分量计算出步进电机姿态角其次根据当前时刻步进电机角度ω和步进电机姿态角计算出激光雷达点云帧位姿中的姿态角其中俯仰角θ'=θ、滚转角φ'=φ ω
‑
π/2、偏航角将步进电机位姿t
r
中平移分量t
r
变换到世界坐标系中的表示为(x
r
,y
r
,z
r
),并计算点云帧位姿的平移分量在世界坐标系中的表示(x
p
,y
p
,z
p
),其中x
p
=x
r
x0,y
p
=y
r
hcos(ω
‑
π/2),z
p
=z
r
hsin(ω
‑
π/2),其中x0表示激光雷达重心坐标与步进电机中心坐标的距离在世界坐标系x轴上的分量,h为激光雷达重心与步进电机的电机轴的轴心之间的距离。
35.最后计算出点云帧的位姿并用转移矩阵t
p
表示,其中t
p
的旋转分量通过计算得到,平移分量通过计算(x
p
,y
p
,z
p
)得到。
36.在本实施例中,根据安装方式,初始状态下的旋轴激光雷达装置和前端所搭载的激光雷达装置均与地面水平,如图2所示,此状态下步进电机角度为ω=π/2,点云帧姿态角为(0,0,0)。
37.然后根据激光雷达自身所受重力g、激光雷达点云帧的姿态角和激光雷达重心与步进电机的电机轴的轴心的距离h计算步进电机的电机轴所受力矩扰动f
g
=gcos(φ')h。
38.第三步,根据力矩扰动的数值|f
g
|设置趋向参数的数值δ=σ|f
g
|。
39.根据下一时刻与当前时刻力矩扰动的增量设置趋向参数的符号,增量为正则对趋向参数赋予正符号δ
×
( 1),增量为负则对趋向参数赋予负符号δ
×
(
‑
1),σ为经验系数,在本实施例中数值为0.01。
40.第四步,根据趋向参数对点云帧位姿进行校正,然后根据回环检测算法对校正后的位姿进行优化。
41.在旋轴激光雷达中,每个姿误差主要来源是由力矩扰动带来的,远大于正常的配准误差。在对点云帧的位姿进行校正主要是对其分量,即点云帧所对应的步进电机角度ω进行校正。具体方法为:对趋向参数符号为正,即δ>0的点云帧所对应的步进电机角度ω收缩优化,即:对趋向参数符号为负,即δ<0的点云帧所对应的步进电机角度ω拉伸优化,即:所述的拉伸和收缩的系数λ与趋向参数的数值δ=σ|f
g
|和步进电机的转
速v的乘积线性相关,即λ=v
·
δ。最后获得校正后的点云帧的姿态角并获得点云帧校正位姿t'
p
,其中t'
p
为转移矩阵,其中旋转分量通过计算得到,平移分量通过计算(x
p
,y'
p
,z'
p
)得到,其中
42.优化的时候首先采用回环检测算法,回环检测算法是能够使得在三维扫描在判断出扫描到之前扫描过的场景时候,获得表示相同场景点云帧之间位姿的偏差并建立回环,以便对回环内的点云帧的位姿进行校正以消除累积误差的算法。如图3所示,所示序号相同则代表场景相同,则构成一个回环,然后通过回环中的每一个点云帧的位姿进行优化获得点云帧优化位姿t”p
。
43.根据点云帧优化位姿即可通过点云配准算法获得扫描环境高质量的三维点云信息。
44.采用本发明所提供的优化方法前后重建出的三维圆球模型的直径误差平均减少了78.3%。有效的优化了外部旋轴在作业时由于激光雷达重力带来的力矩扰动所造成的点云畸变。
45.以上所述仅为本发明应用场景其中的一个实施例,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进等,均包含在本发明的保护范围内。
46.本发明说明书中未做详细描述的内容属于本领域专业技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

