1.本发明属于通信技术领域,特别涉及一种超宽带定位室内目标方法,可用于对城市环境下室内点目标位置的确定。
背景技术:
2.在城市环境下,超宽带信号在室内的通信中由于家具或者墙体的阻挡使得信号产生反射,导致接收机获得的信号不仅包括直射径传来的信号,还包括了室内的反射信号甚至反射信号之间互相干扰,使得接收的信号较直射信号产生相位的偏移,表现为信号的衰减和接收时间滞后。
3.这种现象称为多径现象,由于墙体或家具的遮挡,接收机除了接收发射机直接传来的信号还会接收到经过遮挡物反射或者衍射的信号甚至他们之间互相干扰后的信号。这些多径信号是影响目标定位准确性的十分重要的因素之一。
4.对于多径信号的影响,传统方法主要是通过抑制多径信号来获取目标的真实位置信息。比如:通过改变天线放置策略,使直达波信号和多径信号几乎同时到达天线,或设计地平面天线,遮挡来自天线下方的多径信号,见鲁郁撰写的书籍《北斗
‑
gps双模软件接收机原理与实现技术》。但是这些传统方法,对不同路径的波达时间精准度有严格的要求,仅适合延迟较短的多径环境,其使用范围受到限制。同时,还存在着成本较高、处理复杂、适用范围小的问题。
5.近年来,专家们也提出很多改进方法。申请号为cn2018103327263的专利提出了《一种多径效应抑制方法、装置及设备》,其通过相关信号和衰减信号的预设对应关系,并根据正交变换方法来更新直达信号,以得到精确的直达径信号估计值,但这个方法仅能实现对短多径效应的抑制,而对长多径效应的抑制效果甚微。申请号为cn2018114224627的专利提出了《一种基于多载波信号的多径抑制方法》,其通过利用多载波信号机制,对多频信号间频差进行约束,并将多频点量测量均值化,使得多频点量测量所携带的多径误差趋于0,以削弱甚至消除静态多径效应,但是这个方法增添了复合通道码跟踪环路,增加了系统的复杂度。
6.多径信号的本质是来源于超宽带基站对应的信号,包含着低于直达信号的信号能量以及终端的位置信息,对这部分信号的抑制会导致能量和信息的损失,如果能够加以合理利用,就可以提升多径环境下的定位性能。申请号为cn2019102249115的专利提出了《一种多径利用的自适应相干波束形成方法》,其通过约束反射系数求得最优加权向量,再进行自适应波束形成,有效利用了多径相干信息。但这种方法在当输入信噪比增加时,会出现性能下降、输出信噪比低的问题。胡刘博提出了《基于多径利用的城区目标探测方法研究》,其通过使用雷达对目标定位的理论,结合多径模型,以对目标进行定位。但是在目标静止时,杂波会对该方法产生很大的影响,造成目标定位精度下降。
技术实现要素:
7.本发明的目的在于针对上述现有方法的不足,提出一种基于多径利用的超宽带定位室内目标方法,以提高目标真实位置的检测准确性,同时降低成本和处理复杂度,扩大其适用范围。
8.为实现上述目的,本发明的技术方案包括如下:
9.(1)根据基站发射直达波信号的时间t
l1
和接收直达波信号的时间t
r1
;地面接收机接收到直达波信号时间t
r1
和地面接收机发射直达波信号的时间t
l1
,得到直达波的波达时间τ
a
;
10.(2)根据基站发射一阶多径信号的时间t
l2
和接收一阶多径信号的时间t
r2
;地面接收机接收到一阶多径信号的时间t
r2
和地面接收机发射一阶多径信号的时间t
l2
,得到一阶多径信号的波达时间τ
b
;
11.(3)根据基站发射一阶多径信号的时间t
l3
和接收一阶多径信号的时间t
r3
;地面接收机接收到一阶多径信号的时间t
r3
和地面接收机发射一阶多径信号的时间t
l3
,得到一阶多径信号的波达时间τ
c
;
12.(4)建立城市环境下室内目标几何定位模型:
13.4a)建立平面坐标系,在平面坐标系中定义基站位置q和接收机位置a:
14.q=[r
x
,r
y
],a=[a
x
,a
y
],
[0015]
其中:r
x
为基站位置q的横坐标,r
y
为基站位置q的纵坐标;a
x
为接收机位置a的横坐标,a
y
为接收机位置a的纵坐标;
[0016]
4b)在平面坐标系中对反射轴信息初始化,根据基站位置关于反射轴的对称位置,得到基站关于反射轴x的虚拟基站的位置点p1和基站关于反射轴y的虚拟基站的位置点p2:
[0017]
p1=[d
x1
,d
y1
],p2=[d
x2
,d
y2
];
[0018]
其中:d
x1
为虚拟基站位置p1的横坐标,d
y1
为基站位置p1的纵坐标;d
x2
为接收机位置p2的横坐标,d
y2
为接收机位置p2的纵坐标;
[0019]
4c)根据基站位置q、接收机位置a、虚拟基站的位置p1、p2和反射轴信息,建立数学模型表达式:
[0020][0021]
其中:式<1>是以基站q的位置为圆心,以基站到地面接收机的距离为半径的圆,是直达波信号的几何模型;
[0022]
式<2>是以虚拟基站p1的位置为圆心,以虚拟基站p1到地面接收机的距离为半径的圆,是一阶多径信号的几何模型;
[0023]
式<3>是以虚拟基站p2的位置为圆心,以虚拟基站p2到地面接收机的距离为半径的圆,是一阶多径信号的几何模型;
[0024]
c为电磁波在空间中的传播速度,[t
x
,t
y
]为要测量的目标位置;
[0025]
(5)将直达波信号波达时间τ
a
、一阶多径信号波达时间τ
b
、一阶多径信号波达时间τ
c
分别带入4c)中建立的数学模型表达式中进行联立求解,得到其三个几何模型即三个不
同圆的相交点,该点为目标的位置。
[0026]
本发明与现有技术相比,具有以下优点:
[0027]
1、检测位置准确度高。
[0028]
在多径环境下,传统的匹配滤波方法将受到多径信号的干扰,且对各路径波达时间的准确度要求较高,无法准确测出目标的位置。本发明由于所建模型是利用多径信息对各路径波达时间的综合判断,可以准确地测出目标位置信息。
[0029]
2、模型简单、成本低。
[0030]
为减弱多径效应对目标定位的影响,传统方法是采取抑制多径效应的方法,需要多个接收天线来接收信号,并且对接收信号处理算法复杂。本发明是利用多径信息,建立雷达目标几何定位模型,根据各路径的波达时间与几何定位模型得到数学模型,由数学模型得到目标的真实位置,模型简单,成本较低。
[0031]
3、本发明可利用点目标多径信息对点目标直接进行二维空间定位。
附图说明
[0032]
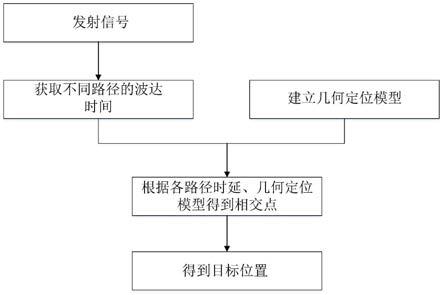
图1是本发明的实现流程图;
[0033]
图2是本发明在多径环境下超宽带定位的原理示意图;
[0034]
图3是本发明在设定的目标和环境参数下的仿真定位结果图;
[0035]
图4是本发明在设定的目标和环境参数下的距离误差仿真结果图。
具体实施方式
[0036]
以下结合附图对本发明的实施例和效果作进一步详细描述
[0037]
参照图1,本实例的实现步骤包括如下:
[0038]
步骤1:获取不同路径的波达时间。
[0039]
1.1)根据基站发射直达波信号的时间t
l1
和接收直达波信号的时间t
r1
,接收机接收到直达波信号时间t
r1
和发射直达波信号的时间t
l1
,得到直达波的波达时间τ
a
:
[0040][0041]
1.2)根据基站发射一阶多径信号的时间t
l2
和接收一阶多径信号的时间t
r2
,接收机接收到一阶多径信号的时间t
r2
和发射一阶多径信号的时间t
l2
,得到一阶多径信号的波达时间τ
b
:
[0042][0043]
1.3)根据基站发射一阶多径信号的时间t
l3
和接收一阶多径信号的时间t
r3
;接收机接收到一阶多径信号的时间t
r3
和发射一阶多径信号的时间t
l3
,得到一阶多径信号的波达时间τ
c
:
[0044][0045]
步骤2:建立超宽带室内目标几何定位模型。
[0046]
参照图2,定义超宽带基站和接收机分别在q点和a点处,根据反射轴信息得到基站
关于反射轴x对称的虚拟基站的位置p1、基站关于反射轴y对称的虚拟基站的位置p2;根据基站位置q、虚拟基站的位置p1、p2和不同路径的波达时间τ
a
、τ
b
、τ
c
,建立超宽带目标几何定位模型,具体实现如下:
[0047]
2.1)建立平面坐标系;
[0048]
2.2)在坐标系中定义超宽带基站位置q和点目标位置a:
[0049]
q=[r
x
,r
y
],a=[a
x
,a
y
];
[0050]
其中:r
x
为基站位置q的横坐标,r
y
为基站位置q的纵坐标;a
x
为接收机位置a的横坐标,a
y
为接收机位置a的纵坐标;
[0051]
2.3)在坐标系中对目标反射轴信息初始化,即根据基站位置关于目标反射轴x和反射轴y的对称位置,得到虚拟基站的位置点p1、p2:
[0052]
p1=[d
x1
,d
y1
],p2=[d
x2
,d
y2
],
[0053]
其中:d
x1
为虚拟基站位置p1的横坐标,d
y1
为基站位置p1的纵坐标;d
x2
为接收机位置p2的横坐标,d
y2
为接收机位置p2的纵坐标;
[0054]
2.4)根据超宽带基站位置q、点目标位置a、虚拟基站的位置p1、p2和目标反射轴之间的关系可以得到基于多径利用的超宽带目标几何定位模型:
[0055]
参照图2,本步骤的具体实现如下:
[0056]
2.4.1)对于直达波信号的波达时间τ
a
,信号从基站q发射,沿路径qa到达接收机a,其几何图是以基站q点为圆心,以qa长度为半径的圆;
[0057]
2.4.2)对于一阶多径信号的波达时间τ
b
,信号从基站q发射,沿路径qf1传播,经反射点f1发生反射后再沿路径f1a到达接收机a;由于基站q和虚拟基站p1关于反射轴x对称,可知信号从基站q发射沿路径qf1传播的路径长度与信号从虚拟基站p1发射沿路径p1f1传播的路径长度相等,即qf1=p1f1。根据等式qf1 f1a=p1f1 f1a=p1a,可将上述信号传播路径看成信号从虚拟基站p1发射,沿路径p1a到达接收机,其几何图是以p1点为圆心,以p1a长度为半径的圆;
[0058]
2.4.3)对于一阶多径信号的波达时间τ
c
,信号从基站q发射,沿路径qf2传播,经反射点f2发生反射后再沿路径f2a到达接收机a;由于基站q和虚拟基站p2关于反射轴y对称,可知信号从基站q发射沿路径qf2传播的路径长度与信号从虚拟基站p2发射沿路径p2f2传播的路径长度相等,即qf2=p2f2。根据等式qf2 f2a=p2f2 f2a=p2a,可将上述信号传播路径看成信号从虚拟基站p2发射,沿路径p2a到达接收机,其几何图是以p2点为圆心,以p2a长度为半径的圆;
[0059]
2.4.4)由上述τ
a
、τ
b
、τ
c
组成的几何图,建立数学模型表达式:
[0060][0061]
其中,式<1>是以基站q的位置为圆心,以基站到地面接收机的距离为半径的圆,是直达波信号的几何模型;
[0062]
式<2>是以虚拟基站p1的位置为圆心,以虚拟基站p1到地面接收机的距离为半径的圆,是一阶多径信号的几何模型;
[0063]
式<3>是以虚拟基站p2的位置为圆心,以虚拟基站p2到地面接收机的距离为半径的圆,是一阶多径信号的几何模型;
[0064]
c为电磁波在空间中的传播速度,[t
x
,t
y
]为要测量的目标位置;
[0065]
步骤3:确定目标位置坐标。
[0066]
3.1)将直达波信号波达时间τ
a
代入2.4.4)的表达式<1>中,可以得到以t
x
和t
y
为未知参数,以基站的位置为圆心,以基站到地面接收机的距离为半径的圆;
[0067]
3.2)将一阶多径信号波达时间τ
b
代入2.4.4)的表达式<2>中,可以得到以t
x
和t
y
为未知参数,以虚拟基站p1的位置为圆心,以虚拟基站p1到地面接收机的距离为半径的圆;
[0068]
3.2)将一阶多径信号波达时间τ
c
代入2.4.4)的表达式<3>中,可以得到以t
x
和t
y
为未知参数,以虚拟基站p2的位置为圆心,以虚拟基站p2到地面接收机的距离为半径的圆;
[0069]
将上述三个不同的圆联立求解,可解得目标位置的横坐标t
x
和纵坐标t
y
,即目标位置[t
x
,t
y
]。
[0070]
本发明的效果可通过以下仿真进一步验证。
[0071]
1.实验条件:
[0072]
设基站参数相同,反射面参数相同。
[0073]
参照图2建好的坐标系,定义基站的坐标矢量为q=[100,100]m,假定目标的坐标矢量为a=[2,2]m。
[0074]
2.实验内容和结果:
[0075]
在反射轴分别沿x轴和y轴的情况下,各路径的波达时间为τ
a
=4.6198e
‑
07s、τ
b
=4.7150e
‑
07s、τ
c
=4.7150e
‑
07s的情况下,用本发明方法对点目标进行定位,结果如图3所示。从图3中可以看出,用本发明方法对点目标进行定位可得点目标与发射机之间的距离为138.592m,真实的的点目标与发射机的距离为138.521m,两种的距离误差值仅为0.071m,如图4所示,证明本发明不仅能对多径环境下室内的点目标进行定位,有很高的定位精度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

