1.本实用新型涉及一种建筑施工监控设备,尤其涉及一种用于溶洞施工监控的自清洁机器人。
背景技术:
2.溶洞是可溶性岩石中因喀斯特作用所形成的地下空间,溶洞的形成是石灰岩地区地下水长期溶蚀的结果,石灰岩里不溶性的碳酸钙受水和二氧化碳的作用能转化为可溶性的碳酸氢钙。随着建筑结构的多样化,人工建造的溶洞景观越来越多。由于溶洞的建造是在地下空间内完成的,且溶洞内部的空间较小,需要采用现有技术的机器人等设备对溶洞施工进行监控,确保施工的进度和安全。现有技术的机器人结构单一,移动不便,摄像采集镜头容易被施工现场的灰尘覆盖而影响到监控效果,实用性较差。
技术实现要素:
3.本实用新型的目的在于提供一种用于溶洞施工监控的自清洁机器人,将摄像头放置在圆筒内部,并透过透明圈进行拍摄,并设置了自清洁擦拭组件,在电机的驱动下转动透明圈,通过棉擦的相对摩擦转动下实现对透明圈上灰尘的擦拭,避免工地上的灰尘遮挡拍摄视线而对机器人的监控产生影响,以解决现有技术中工地上灰尘较大并容易覆盖到机器人的摄像头外表面上而影响摄像视线的问题。
4.本实用新型是这样实现的:
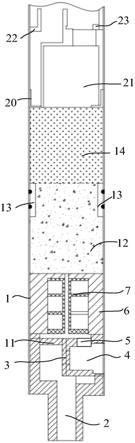
5.一种用于溶洞施工监控的自清洁机器人,包括外框和设置在外框内部的摄像头;所述的外框可转动式安装在遥控车身上,外框内嵌装有自清洁擦拭组件,自清洁擦拭组件包括圆筒、透明圈、固定板、棉擦和驱动机构;外框的前端设有监控镂空部,圆筒固定安装在外框内,透明圈可转动式同轴安装在圆筒的中部,且透明圈匹配嵌装在外框的监控镂空部处并能相对圆筒转动;摄像头通过固定板固定安装在圆筒内,摄像头位于透明圈的中心处并面向监控镂空部设置;驱动机构设置在外框内并与透明圈接触连接,棉擦固定设置在外框的顶部内壁上,且棉擦与透明圈滑动接触。
6.所述的驱动机构包括滚筒轴、驱动滚筒和电机,驱动滚筒通过滚筒轴安装在外框内,驱动滚筒与透明圈相切接触;电机安装在外框的外壁上,电机的输出轴延伸到外框内并与滚筒轴的一端同轴连接且同步转动。
7.所述的驱动滚筒的外壁上包裹有防滑垫,驱动滚筒通过防滑垫与透明圈接触连接。
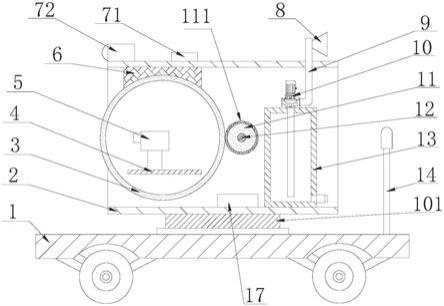
8.所述的遥控车身上设有固定块和天线,固定块上设有电动转轴,外框通过电动转轴安装在固定块上,使外框能通过电动转轴转动。
9.所述的外框的顶部设有对讲机和照明灯。
10.所述的外框内雾化组件,雾化组件包括水箱、雾化喷头、水管和水泵;水箱设置在外框内,水箱外接水源;水管的一端通过水泵设置在水箱内,水管的另一端延伸到外框的顶
部上方并安装有雾化喷头,雾化喷头面向外框的后部设置。
11.所述的外框内设有移动电源。
12.所述的外框的侧端设有检修门,检修门通过合页活动开合。
13.本实用新型将摄像头放置在圆筒内部,并透过透明圈进行拍摄,并设置了自清洁擦拭组件,在电机的驱动下转动透明圈,通过棉擦的相对摩擦转动下实现对透明圈上灰尘的擦拭,避免工地上的灰尘遮挡拍摄视线而对机器人的监控产生影响,以解决现有技术中工地上灰尘较大尘土容易覆盖到机器人上的摄像头外端影响摄像时的视线的问题。
附图说明
14.图1是本实用新型用于溶洞施工监控的自清洁机器人的主视图;
15.图2是本实用新型用于溶洞施工监控的自清洁机器人的剖视图;
16.图3是本实用新型用于溶洞施工监控的自清洁机器人的后视图;
17.图4是本实用新型用于溶洞施工监控的自清洁机器人中外框的侧视图;
18.图5是本实用新型用于溶洞施工监控的自清洁机器人中圆筒的立体图。
19.图中,1遥控车身、101固定块、2外框、3透明圈、4固定板、5摄像头、6棉擦、71对讲机、72照明灯、8雾化喷头、9水管、10水泵、11驱动滚筒、12滚筒轴、13水箱、14天线、15圆筒、16电机、17移动电源、18检修门。
具体实施方式
20.下面结合附图和具体实施例对本实用新型作进一步说明。
21.请参见附图1至附图3,一种用于溶洞施工监控的自清洁机器人,包括外框2和设置在外框2内部的摄像头5。所述的外框2可转动式安装在遥控车身1上,遥控车身1优选为可通过现有技术的5g技术远程遥控的遥控车设备,外框2内嵌装有自清洁擦拭组件,自清洁擦拭组件包括圆筒15、透明圈3、固定板4、棉擦6和驱动机构;请参见附图4和附图5,外框2的前端设有监控镂空部,圆筒15固定安装在外框2内,透明圈3通过轴承可转动式同轴安装在圆筒15的中部,且透明圈3匹配嵌装在外框2的监控镂空部处并能通过轴承相对圆筒15转动;摄像头5通过固定板4固定安装在圆筒15内,摄像头5位于透明圈3的中心处并面向监控镂空部设置,透明圈3既能保护摄像头5,避免摄像头5被粉尘覆盖;驱动机构设置在外框2内并与透明圈3接触连接,棉擦6固定设置在外框2的顶部内壁上,且棉擦6与透明圈3滑动接触,通过透明圈3与棉擦6的相对转动,实现棉擦6对透明圈3表面的擦拭清洁,在摄像头5拍摄的同时进行自清洁,始终保持摄像视野的清晰。
22.所述的驱动机构包括滚筒轴12、驱动滚筒11和电机16,驱动滚筒11通过滚筒轴12安装在外框2内,驱动滚筒11与透明圈3相切接触;电机16安装在外框2的外壁上,电机16的输出轴延伸到外框2内并与滚筒轴12的一端同轴连接且同步转动。在电机16的驱动下,滚筒轴12自转,并带动驱动滚筒11同步转动,在摩擦力的作用下,驱动滚筒11带动透明圈3同步转动,实现透明圈3相对棉擦6的转动。
23.所述的驱动滚筒11的外壁上包裹有防滑垫111,驱动滚筒11通过防滑垫111与透明圈3接触连接,可避免驱动滚筒11与透明圈3之间的滚动传动时发生打滑,确保透明圈3的可靠转动。
24.所述的遥控车身1上设有固定块101和天线14,固定块101上设有电动转轴(图中未示出),外框2通过电动转轴安装在固定块101上,使外框2能通过电动转轴转动。电动转轴可采用伺服电机等设备控制转动,可通过现有技术的5g技术经天线14实现对伺服电机的远程遥控,从而实现外框2的转动,进而实现摄像头5的拍摄角度的调节。
25.所述的外框2的顶部设有对讲机71和照明灯72,内部施工人员可通过讲机71经天线14实现与外部控制人员对话,照明灯72能为溶洞施工监控的视频画面采集提供更好的光线。
26.所述的外框2内雾化组件,雾化组件包括水箱13、雾化喷头8、水管9和水泵10;水箱13设置在外框2内,水箱13通过注水管经阀门外接水源;水管9的一端通过水泵10设置在水箱13内,水管9的另一端延伸到外框2的顶部上方并安装有雾化喷头8,雾化喷头8面向外框2的后部设置。通过外部水源向水箱13内注满水,在水泵10的驱动下将水从水管9输出,经雾化喷头8雾化后喷出,通过喷洒水雾缓解工地上的扬尘问题,从而进一步避免摄像头被灰尘覆盖的问题。水泵10可采用现有技术的液体泵,优选为可通过现有技术的5g技术远程控制的液体泵,从而实现按需喷洒水雾,达到节约用水的目的。
27.所述的外框2内设有移动电源17,可通过移动电源17为电机16、水泵10等电气设备提供电源,确保本实用新型的正常运行,减少电源线路的布设,使用更便捷。
28.所述的外框2的侧端设有检修门18,检修门18通过合页活动开合,便于外框2内的设备的维护和检修。
29.本实用新型的工作原理是:
30.将外框2固定在遥控车身1顶端固定块101的电动转轴上,利用5g技术对遥控车身1进行远程遥控,通过天线14进行信号传输,用于实现遥控车身1的移动和转向。现有技术的5g技术已经被广泛应用于建筑施工领域的
‘
智慧工地’等工程中,可实现智能化远程控制,实现高空、高温、高危作业。遥控车身1带动外框2及外框2内部的摄像头5在施工现场移动,利用5g技术的高效、稳定传输的特性,通过摄像头5实时拍摄施工现场的画面,以便于查看工程进度,达到监控的目的。
31.摄像头5设在圆筒15内部,透过圆筒15上的透明圈3进行拍摄,透明圈3可避免灰尘落在摄像头5上,透明圈3可采用透明塑料材质制成,质量轻,便于透明圈3的顺畅转动,且不影响摄像头5的拍摄。当透明圈3被工地上的灰尘覆盖而影响摄像头5的拍摄视线时,打开电机16,利用电机16带动滚筒轴12转动,滚筒轴12带动其外端的驱动滚筒11转动,驱动滚筒11可采用橡胶材质制成,具有良好的弹性和防滑性能,使其能与透明圈3外端接触,在摩擦力的作用下驱动滚筒11转动时带动透明圈3同步转动,透明圈3转动时,固定于外框2内部顶端的棉擦6对透明圈3的表面起到自清洁擦拭的作用,确保圆筒15内部的摄像头5在透过透明圈3进行拍摄的过程中,透明圈3在不断转动且棉擦6在对透明塑料圈3外表面进行不断的擦拭,始终保持透明圈3的清晰,棉擦6可采用与透明圈3相贴合的弧面结构,棉擦6与透明圈3的接触面积大,确保有效擦拭,避免了工地上的灰尘堆积在透明塑料圈3外表面上而对摄像头5的拍摄视线产生影响,解决了现有技术中工地上灰尘较大且容易覆盖到机器人的摄像头5外端而影响摄像视线的问题。
32.以上仅为本实用新型的较佳实施例而已,并非用于限定本实用新型的保护范围,因此,凡在本实用新型的精神和原则之内所作的任何修改、等同替换、改进等,均应包含在
本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。