1.本发明涉及风力发电技术领域,特别涉及一种风电机组机舱位移监测系统及监测方法。
背景技术:
2.近年来,风电机组向大兆瓦、长叶片和高塔筒的方向发展。由于塔筒的增高及机组容量的增大,使得机舱位置处的晃动幅度较之前有所增加。当机舱晃动幅度超过安全阈值时,会影响机组的安全,严重的甚至会发生倒塔事故,造成巨大的损失。因此,有必要对机舱的位移情况进行有效监测,一旦位移变化异常,应迅速做出处理,保证机组的安全稳定运行。
3.目前,对机舱位移的监测方法主要有以下几种:一、在机组底部不同的位置安装激光雷达,通过雷达反射的时差计算机舱位移,该方法由于使用了激光雷达,使得成本较高,且放置在塔基附近,需要有有效的防护措施;二、在机舱安装信号发生器,利用卫星定位系统监测机舱位移,该方法的误差较大,同样存在成本较高的问题,一旦有恶劣天气影响,会出现信号丢失的情况;三、通过比较机械的测量方法,从机舱引下一条记录位移的锁链,通过锁链的摆动幅度的大小来判断机舱位移情况,该方法实施起来占据塔筒空间较大,且不利于现场的运维工作。因此,需要一种技术手段,可以有效监测风电机组的机舱位移情况,以便实时掌握机舱晃动情况,保证机组的安全运行。
技术实现要素:
4.本发明的目的在于提供一种风电机组机舱位移监测系统及监测方法,解决了现有对机舱位移的监测方法中存在的成本高、误差大或不利于现场运维工作的问题。
5.本发明是通过以下技术方案来实现:
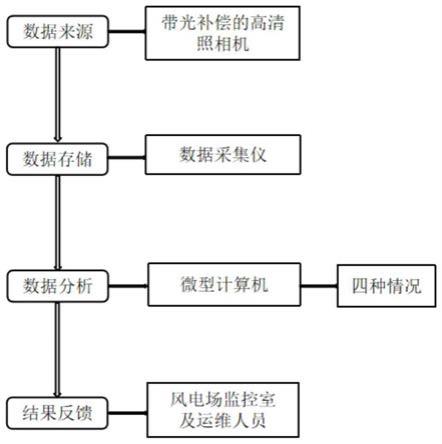
6.一种风电机组机舱位移监测系统,包括相机、数据采集仪、处理器、颜色标识环和上位机;
7.相机设于位于机舱底部的中轴线尾部,颜色标识环设置在塔筒底部,相机正对颜色标识环设置;
8.相机经数据采集仪与处理器连接,处理器用于处理采集到的颜色标识环的图像来识别机舱位移;
9.处理器与上位机连接,用于将识别结果发送给上位机;
10.处理器连接有时钟模块。
11.进一步,颜色标识环为设置在塔筒底部的基座边缘的圆环。
12.进一步,当塔筒底部的基座处不支持用颜色标记,在塔筒底部的基座周围搭建环形标识架,颜色标识环设置在环形标识架顶端。
13.进一步,环形标识架的高度为3~5米。
14.进一步,处理器连接有显示器,显示器用于设置预警位移值、警告位移值和时间阈
值;
15.预警位移值包括第一横向位移量k1*a和第一纵向位移量k1*b,警告位移值包括第二横向位移量k2*a和第二纵向位移量k2*b;其中,a为风电机组正常运行时颜色标识环的最大横向偏移量,b为风电机组正常运行时最大纵向偏移量,k1、k2为常量。
16.进一步,相机的采样频率为1hz。
17.进一步,在风机塔筒上还安装有报警模块,报警模块与处理器连接,用于在异常情况下报警。
18.进一步,报警模块采用声光报警器。
19.本发明还公开了基于所述的风电机组机舱位移监测系统的监测方法,包括以下步骤:
20.s1、采集风电机组各工况运行数据,确定出正常位移范围,根据正常位移范围确定出风电机组正常运行时颜色标识环的最大偏离量最大横向偏移量和最大纵向偏移量;
21.s2、根据最大横向偏移量和最大纵向偏移量设置预警位移值、警告位移值、时间阈值和超预警次数;
22.s3、相机采集颜色标识环的图像,经数据采集仪传递给处理器,处理器处理图像后,判断颜色标识环顶点处的横向偏移量和纵向偏移量大小,情况如下:
23.当横向偏移量或纵向偏移量小于预警位移值时,认为机组正常运行;
24.当横向偏移量大于等于预警位移值且小于等于警告位移值时,或纵向偏移量大于等于预警位移值且小于等于警告位移值时,时钟模块开始计时,并且处理器记录超过预警位移值的次数;
25.当在时间阈值内不超过超预警次数时,处理器发出报警警告,同时将报警信息发送给上位机;当在时间阈值内超过超预警次数时,处理器发出停机信息,同时将停机信息发送给上位机;
26.当横向偏移量大于警告位移值,或纵向偏移量大于警告位移值时,处理器发出停机信息,同时将停机信息发送给上位机。
27.进一步,预警位移值包括第一横向位移量k1*a和第一纵向位移量k1*b,警告位移值包括第二横向位移量k2*a和第二纵向位移量k2*b;其中,a为风电机组正常运行时颜色标识环的最大横向偏移量,b为风电机组正常运行时最大纵向偏移量,k1、k2为常量;
28.横向偏移量记为|x1|,纵向偏移量记为|y1|;
29.s3中的情况具体为:当|x1|<k1*a或|y1|<k1*b时,认为机组正常运行;
30.当k1*a≤|x1|≤k2*a,或k1*b≤|y1|≤k2*b时,时钟模块开始计时,并且处理器记录超过预警位移值的次数;当在时间阈值内不超过超预警次数时,处理器发出报警警告,同时将报警信息发送给上位机;当在时间阈值内超过超预警次数时,处理器发出停机信息,同时将停机信息发送给上位机;
31.当|x1|>k2*a,或|y1|>k2*b时,处理器发出停机信息,同时将停机信息发送给上位机。
32.与现有技术相比,本发明具有以下有益的技术效果:
33.本发明公开了一种风电机组机舱位移监测系统,包括相机、数据采集仪、处理器、颜色标识环和上位机,相机设于位于机舱底部的中轴线尾部,颜色标识环设置在塔筒底部,
相机正对颜色标识环设置,主要通过对相机获得的图像进行处理识别,进而得到机舱的像素位置,再通过机组正常运行时的位移波动范围,确定报警阈值。本系统结构简单,只是加设了相机、颜色识别环和处理器,没有高成本的设备,成本低,也没有占用多余的空间,利于现场运维工作;本发明并不是获得机舱位移的实际值,而是一种相对值,但能较好的达到监测位移晃动范围的目的;同时,本发明考虑到风电机组机舱的晃动特点及偏航的影响,在塔底布置圆环形静止参考点,使得监测方法有效,测量结果精确。
34.进一步,在风机塔筒上还安装有报警模块,报警模块与处理器连接,只要当横向位移量或纵向位移量超过预警位移值后,处理器就启动报警模块,可以提醒附近人员及时避开,避免造成安全事故。
35.本发明还公开了所述风电机组机舱位移监测系统的监测方法,充分考虑风电机组机舱晃动的特点,以静止的塔底座为参考点,晃动的机舱作为照相机放置点;充分利用圆环形的数学特点,与机舱的运动特征匹配,即机舱在偏航转动时,无论怎么转,都是围绕圆形旋转,保证了测量的准确性;采用图像识别及处理的方法确定机舱位移,新颖有效;在图像中引入坐标系确定位移大小,方便实用;无需测量机舱位移是实际值,而是通过机组正常运行数据确立位移在图像中的波动范围,进而确定报警阈值,更符合实际情况;方法实用有效,成本低。
附图说明
36.图1为本发明的一种风电机组机舱位移监测系统的结构示意图;
37.图2为相机的安装位置示意图;
38.图3为环形标识架的结构示意图;
39.图4是静止状态下成像效果;
40.图5是一定位移下成像效果;
41.图6是两种成像结果对比图;
42.图7为本发明的一种风电机组机舱位移监测方法的流程图。
43.其中,1为机舱,2为相机,3为塔筒,4为颜色标识环,5为基座,9为环形标识架。
具体实施方式
44.下面结合具体的实施例对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
45.本发明公开了一种风电机组机舱位移监测系统,包括相机2、数据采集仪、处理器、颜色标识环4和上位机;如图1和2所示,相机2设于位于机舱1底部的中轴线尾部,颜色标识环4设置在塔筒3底部,相机2正对颜色标识环4设置;相机2经数据采集仪与处理器连接,处理器用于处理采集到的颜色标识环4的图像来识别机舱位移;处理器与上位机连接,用于将识别结果发送给上位机。
46.相机2采用带有光补偿功能的高清照相机,安装位置如图1、图2所示,位于机舱1底部的中轴线尾部,调整其像素及拍摄角度,使其对准塔底座颜色标识环4。高清照相机的安装位置充分考虑了风电机组的运行特点,直接关系到位移测量方法的准确性。
47.如图1所示,颜色标识环4是塔筒3底部的基座5边缘用颜色标记的圆环。若塔筒3底
部的基座5处不支持用颜色标记,可如图3所示,在塔筒3底部的基座5周围搭建环形标识架9,高度可根据机组周围的实际情况设定,3~5米为宜。塔底座颜色标识环4的作用是作为机舱位移识别时的静态参考。
48.采用圆环形作为标识,充分考虑了风电机组偏航时的特征,使测量结果更准确有效。
49.相机2的采样频率即拍照频率设置为1hz,图形存储于数据采集仪。设置相机2的图片像素及拍摄方向,静止下的拍摄效果如图4中的实线所示,一定位移下成像效果如图5所示。
50.本发明的风电机组机舱位移监测在设计时,过程如下:
51.1、确定图像的方向,即图像的横向为x方向,纵向为y方向,如图6所示;
52.2、以机舱1静止时刻进入到照片内弧形的顶点为零点p00,0,如图6方框内实线顶点处,即机舱1静止时刻的参考点。根据图像的像素特征,以p0点为中心,x
‑
y方向划分坐标系,每个单位像素点对应唯一的坐标位置pn(x,y);
53.3、对得到的图像,如图4,对进入到图像内塔底座颜色标识环4的弧形,根据颜色特征,利用图像识别方法确定顶点处的像素位置p1(x1,y1)。那么,p1(x1,y1)就是机舱1横向和纵向的位移大小,其中,(x1,y1)具体数值的大小代表位移的大小,其正负值则代表了位移的方向。
54.处理器连接有显示器,显示器用于设置预警位移值、警告位移值和时间阈值。预警位移值包括第一横向位移量k1*a和第一纵向位移量k1*b,警告位移值包括第二横向位移量k2*a和第二纵向位移量k2*b;其中,a为风电机组正常运行时颜色标识环4的最大横向偏移量,b为风电机组正常运行时最大纵向偏移量,k1、k2为常量。
55.所述的风电机组机舱位移监测系统的监测方法,其特征在于,包括以下步骤:
56.s1、采集风电机组各工况运行数据,确定出正常位移范围,根据正常位移范围确定出风电机组正常运行时颜色标识环4的最大偏离量最大横向偏移量和最大纵向偏移量;
57.s2、根据最大横向偏移量和最大纵向偏移量设置预警位移值、警告位移值和时间阈值;
58.s3、相机2采集颜色标识环4的图像,经数据采集仪传递给处理器,处理器处理图像后,判断颜色标识环4顶点处的横向偏移量和纵向偏移量大小,情况如下:
59.横向偏移量记为|x1|,纵向偏移量记为|y1|;
60.s3中的情况具体为:当|x1|<k1*a或|y1|<k1*b时,说明机组正常运行;
61.当k1*a≤|x1|≤k2*a,或k1*b≤|y1|≤k2*b时,时钟模块开始计时,并且处理器记录超过预警位移值的次数;
62.当在时间阈值内不超过超预警次数时,处理器发出报警警告,同时将报警信息发送给上位机;当在时间阈值内超过超预警次数时,处理器发出停机信息,同时将停机信息发送给上位机;
63.当|x1|>k2*a,或|y1|>k2*b时,处理器发出停机信息,同时将停机信息发送给上位机。
64.更优地,在风机塔筒3上还安装有报警模块,报警模块采用声光报警器,报警模块与处理器连接,用于在异常情况下报警。只要当|x1|≥k1*a或|y1|>k1*b后,处理器就启动
报警模块,可以提醒附近人员及时避开,避免造成安全事故。
65.具体在应用到某一风电机组时,时间阈值记为t,超预警次数记为n;k1取1.05,k2取1.1,t取1min,n取8,其监测方法如下:
66.s1.确定机组各工况运行时的正常位移范围。令机组正常运行一段时间,该段时间必须包含满发时段的工况,位移监测系统实时采集数据,确定机组正常运行时的位移范围(a,b),a,b均为正值;
67.s2.根据s1中得出的机组正常运行时的位移范围(a,b),设置预警位移值、警告位移值和时间阈值:
68.s3、相机2采集颜色标识环4的图像,经数据采集仪传递给处理器,处理器处理图像后,判断颜色标识环4顶点处的横向偏移量和纵向偏移量大小,情况如下:
69.情况一:当|x1|<1.05*a或|y1|≤1.05*b时,机组正常运行;
70.情况二:当1.05*a≤|x1|≤1.1*a或1.05*b≤|y1|≤1.1*b时,时钟模块开始计时,并且处理器记录超过预警位移值的次数;当在1min内不超过8次时,处理器发出报警警告,同时将报警信息发送给上位机,请风场中控室关注机组运行情况;
71.当在1min内超过8次时,处理器发出停机信息,同时将停机信息发送给上位机,请风场运维人员检查机组运行情况;
72.情况四:当|x1|>1.1*a或|y1|>1.1*b时,处理器发出停机信息,同时将停机信息发送给上位机,请风场运维人员检查机组运行情况。
73.本发明通过监测机舱位移的方法掌握机组是否处于安全运行状态;充分考虑风电机组机舱1晃动的特点,以静止的塔底座为参考点,晃动的机舱1作为照相机2放置点;充分利用圆环形的数学特点,与机舱1的运动特征匹配,即机舱1在偏航转动时,无论怎么转,都是围绕圆形旋转,保证了测量的准确性;采用图像识别及处理的方法确定机舱位移,新颖有效;在图像中引入坐标系确定位移大小,方便实用;无需测量机舱位移是实际值,而是通过机组正常运行数据确立位移在图像中的波动范围,进而确定报警阈值,更符合实际情况;方法实用有效,成本低。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

