:
1.本实用新型属于工程机械技术领域,具体地说,尤其涉及一种关节式机械手势能回收装置。
背景技术:
2.目前关节式机械手应用非常广泛,关节式机械手被广泛应用的原因是因为它可以很好的代替人工完成一些简单重复且劳动强度大的工作,如自动焊接、自动装配、自动上下料、物料搬运等场合。
3.现有的关节式机械手是模仿人手而设计,大小臂关节采用rv减速机 电机进行连接驱动,无重力势能回收装装置,由于现有的关节式机械手随着其悬臂的增长其提升能力急剧下降(大臂关节及小臂关节的提升能力急剧下降),故现有的关节式机械手不适合远距离大扭矩(重载)场合的使用,并且关节式机械手在工作时,机械臂须频繁的举升与下落,造成机械臂下落时重力势能的浪费。
技术实现要素:
4.本实用新型要解决的技术问题是克服现有技术的不足,提供了一种关节式机械手势能回收装置,其实现关节式机械手所需举升动力自动回收释放补偿,并通过各轴回转驱动实现关节轴的动力输出与释放,同时利用涡轮蜗杆的自锁功能实现关节轴的自锁,大大提升了关节式机械手的提升能力并有效的进行了重力势能的回收。
5.为了实现上述目的,本实用新型是采用以下技术方案实现的:
6.一种关节式机械手势能回收装置,包括机械手底座,所述机械手底座上设有一轴回转驱动,所述一轴回转驱动上设有二轴回转驱动安装座,二轴回转驱动安装座上设有二轴回转驱动和大臂蓄力装置,二轴回转驱动通过大臂连接装置与大臂连接,所述大臂通过三轴回转驱动安装座与三轴回转驱动连接,三轴回转驱动通过小臂连接装置与四轴回转驱动连接,四轴回转驱动又通过小臂与夹爪装置连接,所述三轴回转驱动上还设有小臂蓄力装置。
7.优选地,所述大臂蓄力装置包括大臂蓄力弹簧导向轴、大臂齿条、大臂蓄力弹簧和大臂复位弹簧,所述大臂蓄力弹簧导向轴安装在二轴回转驱动安装座上的导向轴安装孔a中,所述大臂蓄力弹簧和大臂复位弹簧分别安装在大臂蓄力弹簧导向轴上,大臂齿条通过固定块a安装在大臂蓄力弹簧导向轴上。
8.优选地,所述小臂蓄力装置包括小臂复位弹簧、小臂齿条、小臂蓄力弹簧导向轴、小臂蓄力弹簧和小臂蓄力装置安装座,所述小臂蓄力装置安装座安装在三轴回转驱动的壳体上,小臂蓄力弹簧导向轴安装在小臂蓄力装置安装座上的导向轴安装孔b中,所述小臂复位弹簧和小臂蓄力弹簧分别安装在小臂蓄力弹簧导向轴上,小臂齿条通过固定块b安装在小臂蓄力弹簧导向轴上。
9.优选地,所述大臂连接装置上设有齿轮a,所述齿轮a与大臂齿条啮合传动连接;所
述小臂连接装置上设有齿轮b,所述齿轮b与小臂齿条啮合传动连接。
10.优选地,所述一轴回转驱动上设有一轴支撑轴,一轴支撑轴贯穿一轴回转驱动,且一轴支撑轴的上端与二轴回转驱动安装座固定连接,下端与机械手底座连接。
11.优选地,所述二轴回转驱动上设有二轴支撑轴,二轴支撑轴依次贯穿二轴回转驱动安装座、大臂连接装置和二轴回转驱动,且二轴支撑轴的两端与二轴回转驱动安装座连接。
12.优选地,所述小臂连接装置上设有三轴支撑轴,所述三轴支撑轴贯穿三轴回转驱动,且三轴支撑轴安装在三轴回转驱动安装座上。
13.优选地,所述四轴回转驱动上设有小臂支撑轴,所述小臂支撑轴贯穿四轴回转驱动,且小臂支撑轴的一端与小臂连接装置连接,另一端与小臂连接。
14.优选地,所述一轴回转驱动通过一轴减速机与一轴电机连接,二轴回转驱动通过二轴减速机与二轴电机连接,三轴回转驱动通过三轴减速机与三轴电机连接,四轴回转驱动通过四轴减速机与四轴电机连接。
15.与现有技术相比,本实用新型的有益效果是:
16.本实用新型通过大臂蓄力装置和小臂蓄力装置,实现关节式机械手所需举升动力自动回收释放补偿,并通过各轴回转驱动实现关节轴的动力输出与释放,同时利用涡轮蜗杆的自锁功能实现关节轴的自锁,大大提升了关节式机械手的提升能力并有效的进行了重力势能的回收。
附图说明:
17.图1为本实用新型的轴侧图一;
18.图2为本实用新型的轴侧图二;
19.图3为本实用新型的主视图;
20.图4为本实用新型的左视图;
21.图5为本实用新型的蓄能原理图。
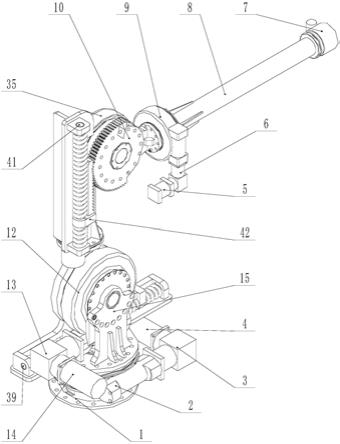
22.图中:1、机械手底座;2、一轴回转驱动;3、一轴电机;4、一轴减速机;5、四轴电机;6、四轴减速机;7、夹爪装置;8、小臂;9、四轴回转驱动;10、小臂连接装置;12、二轴回转驱动;13、二轴减速机;14、二轴电机;15、二轴回转驱动安装座;16、三轴电机;17、三轴减速机;18、小臂复位弹簧;19、小臂齿条;20、小臂蓄力弹簧导向轴;21、小臂蓄力弹簧;22、小臂支撑轴承;23、小臂支撑轴;24、大臂蓄力弹簧导向轴;25、大臂齿条;26、大臂蓄力弹簧;27、大臂复位弹簧;28、三轴支撑轴承;29、三轴支撑轴;30、二轴支撑轴承;31、二轴支撑轴;32、一轴支撑轴;33、一轴支撑轴承;34、小臂蓄力装置安装座;35、三轴回转驱动;36、三轴回转驱动安装座;37、大臂;38、大臂连接装置;39、导向轴安装孔a;40、固定块a;41、导向轴安装孔b;42、固定块b;43、齿轮a;44、齿轮b。
具体实施方式:
23.下面通过具体实施例并结合附图对本实用新型作进一步说明。
24.实施例1:
25.如图1
‑
4所示,一种关节式机械手势能回收装置,包括机械手底座1,所述机械手底
座1上设有一轴回转驱动2,一轴回转驱动2的壳体通过螺栓固定在机械手底座1上,所述一轴回转驱动2上设有二轴回转驱动安装座15,二轴回转驱动安装座15通过螺栓安装固定在一轴回转驱动2的涡轮上,二轴回转驱动安装座15上设有二轴回转驱动12和大臂蓄力装置,二轴回转驱动安装座15通过螺栓与二轴回转驱动12的壳体连接,二轴回转驱动12通过大臂连接装置38与大臂37连接,大臂37通过螺栓安装固定在大臂连接装置38上,大臂连接装置38通过螺栓安装固定在二轴回转驱动12的涡轮上,所述大臂37通过三轴回转驱动安装座36与三轴回转驱动35连接,三轴回转驱动安装座36通过螺栓固定在大臂37上,三轴回转驱动35的壳体通过螺栓固定在三轴回转驱动安装座36上,三轴回转驱动35通过小臂连接装置10与四轴回转驱动9连接,小臂连接装置10通过螺栓固定在三轴回转驱动35的涡轮上,四轴回转驱动9又通过小臂8与夹爪装置7连接,四轴回转驱动9的壳体通过螺栓固定在小臂连接装置10上,小臂8通过螺栓固定在四轴回转驱动9的涡轮上,夹爪装置7通过螺栓固定在小臂8上,所述三轴回转驱动35上还设有小臂蓄力装置。
26.一轴回转驱动2、二轴回转驱动12、三轴回转驱动35和四轴回转驱动9的结构均由壳体、涡轮、蜗杆、滚珠、内支撑圈等组成,其中蜗杆安装在壳体上并与涡轮啮合,涡轮通过滚珠与内支撑圈相配合,内支撑圈通过螺栓固定在壳体上。
27.实施例2:
28.一种关节式机械手势能回收装置,所述大臂蓄力装置包括大臂蓄力弹簧导向轴24、大臂齿条25、大臂蓄力弹簧26和大臂复位弹簧27,所述大臂蓄力弹簧导向轴24安装在二轴回转驱动安装座15上的导向轴安装孔a39中,所述大臂蓄力弹簧26和大臂复位弹簧27分别安装在大臂蓄力弹簧导向轴24上,大臂齿条25通过固定块a40安装在大臂蓄力弹簧导向轴24上,固定块a40可来回滑动地安装在大臂蓄力弹簧导向轴24上。
29.所述小臂蓄力装置包括小臂复位弹簧18、小臂齿条19、小臂蓄力弹簧导向轴20、小臂蓄力弹簧21和小臂蓄力装置安装座34,所述小臂蓄力装置安装座34通过螺栓安装在三轴回转驱动35的壳体上,小臂蓄力弹簧导向轴20安装在小臂蓄力装置安装座34上的导向轴安装孔b41中,所述小臂复位弹簧18和小臂蓄力弹簧21分别安装在小臂蓄力弹簧导向轴20上,小臂齿条19通过固定块b42安装在小臂蓄力弹簧导向轴20上,固定块b42可来回滑动地安装在小臂蓄力弹簧导向轴20上。
30.所述大臂连接装置38上设有齿轮a43,所述齿轮a43与大臂齿条25啮合传动连接,齿轮a43通过与大臂齿条25配合压缩大臂蓄力弹簧26进行势能回收;所述小臂连接装置10上设有齿轮b44,所述齿轮b44与小臂齿条19啮合传动连接,齿轮b44通过与小臂齿条19配合压缩小臂蓄力弹簧21进行势能回收。
31.所述一轴回转驱动2上设有一轴支撑轴32,一轴支撑轴32贯穿一轴回转驱动2,且一轴支撑轴32的上端通过螺栓与二轴回转驱动安装座15固定连接,下端通过一轴支撑轴承33与机械手底座1连接。
32.所述二轴回转驱动12上设有二轴支撑轴31,二轴支撑轴31依次贯穿二轴回转驱动安装座15、大臂连接装置38和二轴回转驱动12,且二轴支撑轴31的两端通过二轴支撑轴承30与二轴回转驱动安装座15连接。
33.所述小臂连接装置10上设有三轴支撑轴29,所述三轴支撑轴29贯穿三轴回转驱动35,且三轴支撑轴29通过三轴支撑轴承28安装在三轴回转驱动安装座36上。
34.所述四轴回转驱动9上设有小臂支撑轴23,所述小臂支撑轴23贯穿四轴回转驱动9,且小臂支撑轴23的一端通过小臂支撑轴承22与小臂连接装置10连接,另一端与小臂8连接。
35.所述一轴回转驱动2通过一轴减速机4与一轴电机3连接,二轴回转驱动12通过二轴减速机13与二轴电机14连接,三轴回转驱动35通过三轴减速机17与三轴电机16连接,四轴回转驱动9通过四轴减速机6与四轴电机5连接。其他部分与实施例1相同。
36.本实用新型的工作原理为:
37.如图5所示,大臂37蓄能工作原理:当大臂37由竖直状态旋转至水平状态时,大臂连接装置38上的齿轮a43与大臂齿条25啮合,从而使大臂齿条25沿大臂蓄力弹簧导向轴24产生相对移动,从而压缩大臂蓄力弹簧26进行蓄力,其所需动力是由机械臂自重及二轴电机14、二轴减速机13驱动二轴回转驱动12正转产生。
38.大臂37能量释放工作原理:当大臂37由水平状态旋转至竖直状态进行举升时,是由二轴电机14、二轴减速机13驱动二轴回转驱动12反转,同时大臂蓄力弹簧26进行能量释放,并驱动大臂齿条25及与其啮合的齿轮a43驱动大臂连接装置38复位旋转,从而实现机械臂及重物的举升。
39.小臂8的蓄能及能量释放工作原理与大臂37相同,以此往复,从而实现关节式机械手的回收及释放,实现举升动力的自动补偿。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

