1.本发明涉及混料设备技术领域,具体涉及一种均匀性在线可控粉体混合系统、控制方法及粉体强化混合方法。
背景技术:
2.在制药行业连续化固体制剂生产中,多组分医药粉体要按医药配方比例投入混合装备,进行连续粉体投料、混合和出料生产,然而在连续混合过程中,往往由于粉体搭桥、分层,以及混合转速和粉体堆积密度波动,诱发连续出料多组分混合粉体存在混合不均匀性与不稳定的共性技术问题,使得固体制剂产生一致性难以得到保证,降低了固体制剂药丸的溶解性和生物疗效的一致性,严重影响固体制剂药丸的品质。
3.目前,固体制剂药丸制造基本采用间歇式立式搅拌桨混合,其混合时间长,且缺乏精确在线实时检测和精密调控混合均匀性与一致性的技术方法,因而上述混合方式难以适应国际上制药工艺面临从传统间歇批量制药工艺向连续化制药工艺飞跃的技术发展要求,而美国食品药品总局提出了混合均匀性含量分数相对标准偏差低于5%的技术指标要求。现有多组分混合粉体存在混合不均匀性与不稳定的共性技术问题,使得固体制剂制造产生一致性难以得到保证的技术问题。
技术实现要素:
4.针对现有技术的不足,本发明的目的在于提供一种粉体混合系统、控制方法及粉体强化混合方法,旨在解决现有技术中多组分混合粉体存在混合不均匀与不稳定的共性技术问题,使得固体制剂制造产生一致性难以得到保证的技术问题。
5.本发明的一方面在于提供一种粉体混合系统,用于对不同组分的粉体进行混合,所述系统包括:供料装置,用于供应不同组分的粉体;混料装置,包括混料筒体与搅拌螺杆,所述混料筒体包括可拆卸连接的第一壳体与第二壳体,所述第一壳体与所述第二壳体围合形成混料腔,所述搅拌螺杆的两端分别设有轴承箱,所述第一壳体与所述第二壳体将所述轴承箱夹紧以使所述搅拌螺杆位于所述混料腔内,所述第一壳体的一端设有与所述混料腔连通的进料口,所述第二壳体远离所述进料口的一端设有与所述混料腔连通的出料口,在一动力源的驱动下,所述搅拌螺杆用于驱动粉体沿一预设轨迹与另一混料腔内的粉体进行混合,并推动混合粉体自所述进料口一侧向所述出料口一侧持续混合运动;近红外光谱检测装置,包括多通道光纤光源、多通道光纤输入输出模块、多个光纤非接触扩散反射探头、带多光纤信号输入的近红外光谱仪、出口粉体输送流动速度调控模块、数据同步采集模块与数据分析模块,用于对经所述出料口排出的混合粉体进行空间多点组分含量和混合均匀性的在线实时同步检测,经过近红外光谱仪检测获得的谱峰特征曲线的预处理和多变量数据统计分析修正,获得修正光谱谱峰特征曲线,以此构建savizky
‑
golay二阶导数光谱谱峰强度与组分质量分数含量的关联实时软预测模型及其实测校正预测模型,实现出口粉体多点在线实时组分质量分数含量和混合均匀性相对平均标准偏差rsd的同步软测量。
6.根据上述技术方案的一方面,所述混料腔包括第一混料腔、第二混料腔与第三混料腔,第一混料腔与所述第二混料腔分别设于所述混料筒体的径向两侧,所述第三混料腔设于所述第一混料腔与所述第二混料腔之间。
7.根据上述技术方案的一方面,所述第一混料腔内穿设有第一搅拌螺杆,所述第二混料腔内穿设有第二搅拌螺杆,所述第一搅拌螺杆与所述第二搅拌螺杆互为反向运动,以分别驱动所述第一混料腔内的第一粉体与所述第二混料腔内的第二粉体进行混合。
8.根据上述技术方案的一方面,所述第一搅拌螺杆与所述第二搅拌螺杆中的一个连接至一驱动模组,所述第一搅拌螺杆与所述第二搅拌螺杆远离所述驱动模组的一端通过齿轮副连接,所述驱动模组驱动第一搅拌螺杆与第二搅拌螺杆中的一个转动并通过所述齿轮副带动另一个转动。
9.根据上述技术方案的一方面,所述近红外光谱检测装置包括多通道光纤光源、多个光纤非接触扩散反射探头、带多光纤信号输入的近红外光谱仪,所述带多光纤信号输入的近红外光谱仪通过所述多通道光纤光源和多个光纤非接触扩散反射探头照射检测混合粉体,并形成谱峰特征曲线,所述数据同步采集模块用于同步获取空间多点所述谱峰特征曲线,所述数据分析模块用于所述谱峰特征曲线的预处理和多变量数据统计分析修正,获得修正光谱谱峰特征曲线,以此构建savizky
‑
golay二阶导数光谱谱峰强度与组分质量分数含量的关联实时软预测模型及其实测校正预测模型,计算出口混合粉体空间多点在线实时组分质量分数含量,依据所述空间多点在线实时组分质量分数含量计算混合均匀性相对平均标准偏差rsd,从而实现所述空间多点在线实时组分质量分数含量和混合均匀性相对平均标准偏差rsd在线实时同步软测量;计算混合粉体中不同组分的相对平均标准偏差rsd,以根据所述相对平均标准偏差rsd调整所述搅拌螺杆与所述供料装置的工作参数。
10.根据上述技术方案的一方面,所述近红外光谱检测装置还包括一下料仓,所述下料仓具有一下料流道,所述下料流道内设有一转速恒定可控的转轮,用于抑制粉体颗粒运动速度多变复杂环境诱发的检测误差,所述多个光纤非接触扩散反射探头和多通道光纤光源设于所述下料仓的壳体上且探照方向朝向所述下料流道内的粉体床。
11.本发明的另一方面在于提供一种粉体混合系统的控制方法,应用于上述粉体混合系统,所述方法包括:通过近红外光谱检测装置对混料装置出料口排出的混合粉体进行空间多点在线实时组分质量分数含量和混合均匀性的相对平均标准偏差rsd同步软测量;经过数据分析模块的savizky
‑
golay二阶导数光谱谱峰强度与组分质量分数含量的关联实时软预测模型及其实测校正预测模型,计算出口混合粉体空间多点在线实时组分质量分数含量,依据所述空间多点在线实时组分质量分数含量计算混合均匀性相对平均标准偏差rsd;根据所述相对平均标准偏差rsd和基于离散元模拟的相对平均标准偏差rsd与搅拌螺杆转速的关联预测控制理论模型及其在线实时智能纠偏技术,调节搅拌螺杆的工作参
数与供料装置的工作参数,实现混合均匀性的在线实时可控混合。
12.根据上述技术方案的一方面,所述方法中:所述搅拌螺杆的工作参数至少包括搅拌螺杆转速、失重喂料螺杆转速及相邻搅拌螺杆轴心的间距。
13.根据上述技术方案的一方面,所述方法中:基于粉体混合过程的离散元模拟,建立相对平均标准偏差rsd与搅拌螺杆转速的关联预测控制理论模型:其中: a和b为模型系数,受控于搅拌螺杆的结构特性、粉体流变特性和混合工艺参数,n为螺杆转速;基于在线多点光纤探头近红外光谱检测获得的混合均匀性相对平均标准偏差rsd的实测值,在线实时进行基于离散元模拟的相对平均标准偏差rsd与搅拌螺杆转速的关联预测控制理论模型的在线实时智能纠偏;设置用于检测搅拌螺杆转速的螺杆转速传感器,以及设置用于控制动力模组转速的变频转速控制器;基于所述关联预测控制理论模型及其在线实时智能纠偏技术,在线实时检测和调控搅拌螺杆的转速,以实时在线对相对平均标准偏差rsd进行可控混合制造。
14.本发明的另一方面在于提供一种粉体强化混合方法,应用于上述技术方案中所述的粉体混合系统,所述方法包括:基于粉体的流变性能特性参数,及粉体混合系统的结构特征,通过离散元模拟确定双搅拌螺杆之间形成∞字型机械流化螺旋混合运动的临界转速;判断所述搅拌螺杆的转速是否超过所述临界转速;若否,增加所述搅拌螺杆的转速或减小所述搅拌螺杆的啮合间隙以强化混合粉体颗粒的混合运动强度,以实现粉体的强化混合。
15.与现有技术相比:本发明所示的粉体混合系统,通过在混合粉体的出料口设置多点光纤探头近红外光谱检测装置,能够起到对混合粉体空间多点组分质量分数含量和混合均匀性相对平均标准偏差rsd进行在线实时同步软测量,使得可以根据多点光纤探头近红外光谱检测装置的实时同步软测量值,动态调整搅拌螺杆的工作参数与供料装置的工作参数,从而保证在线检测的混合均匀性相对标准偏差低于5%的技术指标要求,能够有效达到粉体的混合均匀性与一致性的高质量要求。
16.本发明的附加方面与优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
17.本发明的上述与/或附加的方面与优点从结合下面附图对实施例的描述中将变得明显与容易理解,其中:图1为本发明第一实施例中混料装置的结构示意图;图2为本发明第一实施例中混料筒体的结构示意图;图3为本发明第一实施例中搅拌螺杆、驱动模组及齿轮副的结构示意图;
图4为本发明第一实施例中粉体混合系统的结构示意图;图5为本发明第二实施例中细粗颗粒混合三维形态示意图;图6为本发明第二实施例中螺杆转速对粉体混合均匀性和稳定性随时间的演化规律示意图;图7为本发明第二实施例中啮合螺杆的间隙对粉体混合均匀性和稳定性随时间的演化规律示意图;图8为本发明第二实施例中相对平均标准偏差rsd与螺杆转速关联控制模型曲线示意图;图9为本发明第二实施例中相对平均标准偏差rsd与细粉配方比质量含量协同耦合曲线示意图;图10为本发明第二实施例中不同含量标准参考试样光谱谱峰特征修正曲线示意图;图11为本发明第二实施例中savizky
‑
golay二阶导数光谱谱峰强度与混合粉体组分含量关联曲线示意图;图12为本发明第二实施例中实测校正预测模型曲线示意图;附图元器件符号说明:混料筒体10、第一壳体11、出料口110、第二壳体12、进料口120、第一混料腔20、第二混料腔21、第三混料腔22、第一搅拌螺杆30、第二搅拌螺杆31、齿轮副32、驱动模组33、轴承箱40。
具体实施方式
18.为使本发明的目的、特征与优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。附图中给出了本发明的若干实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。
19.请结合图1
‑
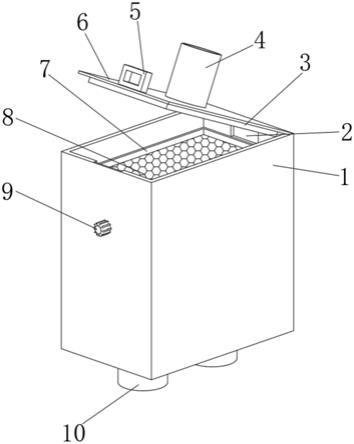
4,本发明的第一实施例提供了一种粉体混合系统,用于对不同组分的粉体进行混合,该系统包括供料装置、可快拆装与易清洗的混料装置、多点光纤探头近红外光谱检测装置和均匀性在线控制装置:在本实施例中,供料装置用于供应二种不同组分的粉体,供料装置例如采用现有的粉体失重供料机。
20.其中,混料装置包括空心状的混料筒体10,混料筒体10的内部沿其轴向设有两平行且连通的混料腔,混料筒体10的一端设有两个进料口120且分别与混料腔连通,也即供料装置输出的粉体可以经过进料口120进入到混料腔内。混料筒体10上远离进料口120的一端设有与混料腔同时连通的出料口110,出料口110尽量的远离进料口120,能够增加粉体在混料腔中的混料行程,从而提升粉体的混合度。作为混料装置,混料腔内穿设有搅拌螺杆,搅拌螺杆由动力源驱动,带动搅拌螺杆转动,在搅拌螺杆转动的过程中,搅拌螺杆用于驱动粉体沿一预设轨迹与另一混料腔内的粉体进行混合,并推动混合粉体自进料口120一侧向出料口110一侧运动。
21.具体而言,混料腔包括第一混料腔20、第二混料腔21与第三混料腔22,其中,第一
混料腔20与第二混料腔21分别设于混料筒体10的径向两侧,第三混料腔22设于第一混料腔20与第二混料腔21之间。实际上,在第一混料腔20与第二混料腔21之间的交汇区域形成了上述的第三混料腔22,粉体在混料腔内对流、扩散与剪切,从而起到混料效果。
22.其中,第一混料腔20内穿设有第一搅拌螺杆30,第二混料腔21内穿设有第二搅拌螺杆31,第一搅拌螺杆30与第二搅拌螺杆31互为反向运动,第一混料腔20内的第一粉体与第二混料腔21内的第二粉体导入第三混料腔22中进行混合。
23.示例而非限定,第一搅拌螺杆30与第二搅拌螺杆31的一端通过齿轮副32连接,第一搅拌螺杆30与第二搅拌螺杆31中,第一搅拌螺杆30远离齿轮副32的一端连接至一驱动模组33,驱动模组33驱动第一搅拌螺杆30顺时针转动,并通过齿轮副32带动第二搅拌螺杆31逆时针转动。
24.在其它可行的实施例中,第一搅拌螺杆与第二搅拌螺杆可以分别由驱动模组驱动。当然,驱动模组也可以直接驱动第二搅拌螺杆,通过齿轮副带动第一搅拌螺杆转动。
25.为了便于可快拆、快装第一搅拌螺杆30与第二搅拌螺杆31,在本实施例中,混料筒体10采用分体式组合模块设计,混料筒体10包括第一壳体11、第二壳体12和轴承箱40,第一壳体11与第二壳体12密封连接围合形成混料腔,并将第一搅拌螺杆30与第二搅拌螺杆31分别夹设于第一混料腔20与第二混料腔21内。
26.示例而非限定,第二壳体12设于第一壳体11的顶部,为了便于粉体进出料,进料口120设于第二壳体12的顶部,出料口110设于第一壳体11的底部。搅拌螺杆的两端滚动连接于轴承箱40中,轴承箱40设置于混料筒体10左右二端,轴承箱40设有一个八字型或长圆形的梯型突缘卡板,而第一壳体11与第二壳体12左右二端设有二个可与八字型或长圆形的梯型突缘卡板相配合的梯型截面的凹槽,将左右二端轴承箱40凸出的八字型或长圆形的梯型突缘卡板,安装在混料筒体10左右二端的矩形或梯型截面凹槽内,形成固定配合。其安装过程是:二个搅拌螺杆先安装于左右二端的轴承箱40中,形成一个整体部件,同时形成双螺杆啮合配合,然后将上述整体部件安装于第一壳体的矩形或梯型截面凹槽内,盖上第二壳体,使用紧固件将第一壳体、第二壳体与左右二端的轴承箱40形成牢固的固定配合,就可实现螺杆混合系统的快拆、快装和清洗,满足固体制剂的封闭无尘和便于清洗的超净环境的技术要求。
27.在其它一些实施例中,第一壳体与第二壳体可以由电驱动装置控制打开与关闭。
28.在本实施例中,粉体的混合过程是这样的,第一混料腔20中的第一粉体被第一搅拌螺杆30卷起,在离心力的作用下,部分第一粉体将被抛入第三混料腔22中,在第三混料腔22与部分第二粉体混合后,部分第一粉体将进一步进入第二混料腔21中与第二粉体混合。同时,第二混料腔21中的第二粉体被第二搅拌螺杆31卷起,在离心力的作用下,部分第二粉体将被抛入第三混料腔22中,在第三混料腔22与部分第一粉体混合后,部分第二粉体将进一步进入第一混料腔20中与第一粉体混合。通过上述混合方式,第一粉体与第二粉体将被充分混合。
29.目前,美国食品药品总局提出了混合均匀性在线检测的混合均匀性含量分数相对标准偏差低于5%的技术指标要求,而现有混合粉体的混合均匀性完全以技术人员的工作经验评定,这存在较为明显的主观性,因此也无法满足混合粉体均匀性和稳定性的技术指标要求。
30.在本实施例中,多点光纤探头近红外光谱检测装置用于对经出料口110排出的混合粉体进行空间多点在线实时组分质量分数含量和混合均匀性的相对平均标准偏差rsd同步软测量,以根据均匀性相对标准偏差调整搅拌螺杆与供料装置的工作参数。
31.具体而言,近红外光谱检测装置包括多通道光纤光源、多通道光纤输入输出模块、多个光纤非接触扩散反射探头、带多光纤信号输入的近红外光谱仪、出口粉体输送流动速度调控模块、数据同步采集模块与数据分析模块。近红外光谱仪通过多通道光纤光源和多个光纤非接触扩散反射探头照射检测混合粉体并形谱峰特征曲线,谱峰特征曲线经过预处理和多变量数据统计分析修正,获得修正光谱谱峰特征曲线,以此构建savizky
‑
golay二阶导数光谱谱峰强度与组分质量分数含量的关联实时软预测模型及其实测校正预测模型,实现出口粉体多点在线实时组分质量分数含量和混合均匀性相对平均标准偏差rsd的在线同步软测量。经过数据分析模块的savizky
‑
golay二阶导数光谱谱峰强度与组分质量分数含量的关联实时软预测模型及其实测校正预测模型,计算出口混合粉体空间多点在线实时组分质量分数含量,依据空间多点在线实时组分质量分数含量计算混合均匀性相对平均标准偏差rsd;根据混合均匀性相对平均标准偏差rsd和基于离散元模拟的相对平均标准偏差rsd与搅拌螺杆转速的关联预测控制理论模型、及其在线实时智能纠偏技术,调节搅拌螺杆的工作参数与供料装置的工作参数,实现混合均匀性的在线实时可控混合。
32.数据分析模块用于计算混合粉体多点在线实时组分质量分数含量和混合均匀性相对平均标准偏差rsd,以根据相对标准偏差调整搅拌螺杆与供料装置的工作参数。
33.其中,搅拌螺杆的工作参数例如搅拌螺杆的转速以及两个搅拌螺杆之间的间距,当搅拌螺杆的转速较高时粉体的混合效果更好,两个搅拌螺杆之间的间距越小时粉体的混合均匀性也越好。而供料装置的工作参数为粉体失重供料机中输送螺杆的转速,通过转速传感器和变频调速控制器实现供料装置组分配方定比控制。
34.为了使得混合粉体能够集中排出,近红外光谱检测装置还包括一下料仓,下料仓具有一下料流道,混合粉体在下料流道中流通。并且下料流道内设有一转速恒定可控的转轮,用于抑制粉体颗粒运动速度多变复杂环境诱发的检测误差,多通道光纤光源、多个光纤非接触扩散反射探头沿横向设于下料仓的壳体上且探照探测方向朝向下料流道内的粉体床近表面。
35.采用本实施例当中所示的粉体混合系统,首先,其混料筒体采用分体式设计,便于使用过程中的快速拆装,便于拆卸后的清洗消毒,从而满足了固体制剂的封闭无尘和便于清洗的超净环境的技术要求。其次,在混合粉体的出料口设置多点光纤探头近红外光谱检测装置,能够起到对混合粉体空间多点的粉体组分质量分数含量和混合均匀性相对平均标准偏差rsd进行在线实时同步软测量,使得可以根据混合均匀性相对平均标准偏差rsd在线实时同步软测量结果动态调整搅拌螺杆的工作参数与供料装置的工作参数,从而保证在线检测的混合均匀性含量分数相对标准偏差低于5%的技术指标要求,能够有效达到粉体混合均匀性与一致性的高质量要求。
36.请结合图5
‑
12,本发明的第二实施例提供了一种粉体混合系统的控制方法,应用于上述实施例中的粉体混合系统,方法包括:通过多点光纤探头近红外光谱检测装置对混料装置出料口排出的混合粉体进行
空间多点在线实时近红外光谱检测,获得修正光谱谱峰特征曲线,以此构建savizky
‑
golay二阶导数光谱谱峰强度与组分质量分数含量的关联实时软预测模型及其实测校正预测模型;经过数据分析模块的savizky
‑
golay二阶导数光谱谱峰强度与组分质量分数含量的关联实时软预测模型及其实测校正预测模型,计算出口混合粉体空间多点在线实时组分质量分数含量,依据空间多点在线实时组分质量分数含量计算混合均匀性相对平均标准偏差rsd;根据混合均匀性相对平均标准偏差rsd和基于离散元模拟的相对平均标准偏差rsd与搅拌螺杆转速的关联预测控制理论模型、及其在线实时智能纠偏技术,调节搅拌螺杆的工作参数与供料装置的工作参数,实现混合均匀性的在线实时可控混合。
37.其中,搅拌螺杆的工作参数至少包括搅拌螺杆的转速及相邻搅拌螺杆轴心的间距;供料装置的工作参数至少包括供料装置中用于控制失重喂料装置输送螺杆的旋转转速。
38.其中,混合均匀性是在双螺杆的啮合反向旋转混合系统的粉体混合终点出口处不同空间点位置取样,通过多点取样的粉体组分含量质量分数的相对标准偏差rsd来表征粉体混合的均匀性,粉体组分含量质量分数的相对标准偏差越小,则混合均匀性越好,多点取样的粉体组分含量质量分数的相对标准偏差小于5%,则认为粉体混合终点出口的混合粉体达到混合均匀性要求。
39.为了模拟仿真确定粉体混合终点出口粉体组分含量质量分数及其相对标准偏差,在出口处取若干个微单元控制计量体,微单元控制计量体的体积应等于多点光纤探头近红外光谱检测系统的光斑照射穿透的粉体体积,以保证通过离散元模拟仿真预测的取样微单元控制计量体的组分含量质量分数与多点光纤探头近红外光谱检测系统在线实测的组分含量质量分数一致。
40.其中,粉体混合均匀性相对标准偏差rsd为:式中:n为取样微单元控制计量体数量,i为取样微单元控制计量体编号,为组分a的配方组分含量质量分数,为编号为i的取样微单元控制计量体的a组分含量质量分数,下标:a表示组分相,i表示取样微单元控制计量体编号。
41.混合稳定性是在啮合反向双螺杆旋转混合系统的粉体混合终点出口处空间多点取样的粉体组分含量质量分数及其相对标准偏差不随时间变化而变化,来表征粉体混合特性的可重复再现性。
42.请再次结合图5
‑
12,本发明的第三实施例提供了一种粉体强化混合方法,应用于上述实施例中的粉体混合系统,所述方法包括步骤s10
‑
s30:步骤s10,基于粉体的流变性能特性参数,及粉体混合系统的结构特征,通过离散元模拟确定双搅拌螺杆之间形成∞字型机械流化螺旋混合运动的临界转速;
步骤s20,判断所述搅拌螺杆的转速是否超过所述临界转速;当判定搅拌螺杆的转速未超过临界转速时,所述方法进入步骤s30;步骤s30,增加所述搅拌螺杆的转速或减小所述搅拌螺杆的啮合间隙以强化混合粉体颗粒的混合运动强度,以实现粉体的强化混合。
43.在本实施例中,基于机械流化混合粉体颗粒的∞字型螺旋混合运动动力学与混合均匀性、稳定性的协同关联理论模型研究,发现粉体混合均匀性与混合粉体颗粒在双螺杆之间混合粉体的∞字型机械流化螺旋混合运动强度呈正关联关系,而混合粉体颗粒∞字型机械流化螺旋混合运动强度受控于螺杆转速和双螺杆的啮合间隙,增加螺杆转速或减小啮合间隙均能强化混合粉体颗粒∞字型机械流化螺旋混合运动强度,从而强化粉体混合的均匀性和稳定性。
44.当螺杆转速超过某一临界转速,混合粉体颗粒开始呈现∞字型机械流化螺旋混合运动,螺杆转速越高或啮合间隙越小,其∞字型机械流化螺旋混合运动强度越大,则粉体混合的均匀性和稳定性的强化效果越好。
45.产生混合粉体∞字型机械流化螺旋混合运动的临界转速受控于双螺杆结构特性、颗粒流变特性和混合工艺参数,可通过离散元模拟仿真预测确定。只要双螺杆混合系统的螺杆转速超过其临界转速,即可通过诱发混合粉体产生∞字型机械流化螺旋混合运动,强化双螺杆混合的均匀性和稳定性,提高双螺杆混合系统的混合性能和混合效率,缩短实现终点混合均匀性和稳定性所需混合停留时间。
46.基于混合过程的离散元模拟,可建立混合均匀性相对平均标准偏差rsd与搅拌螺杆转速的关联预测控制理论模型:其中: a和b为模型系数,受控于搅拌螺杆的结构特性、粉体流变特性和混合工艺参数,n为螺杆转速;设置用于检测搅拌螺杆转速的螺杆转速传感器,以及设置用于控制动力模组转速的变频转速控制器;基于关联预测控制理论模型,在线实时检测和调控搅拌螺杆的转速,以实时在线对相对平均标准偏差rsd进行可控混合制造。
47.请结合图5
‑
9,超低组分质量分数含量的多组分粉体混合的均匀性与稳定性一直是粉体混合领域的技术瓶颈,将本专利的混合均匀性和稳定性强化混合方法和技术应用于超低组分质量分数含量的多组分粉体混合的实际工程中:a粉体颗粒:粒径为200微米,密度为450kg/m3。b粉体颗粒:粒径为44微米,密度为3140kg/m3。配方组分质量分数: b粉体颗粒组分质量分数含量为99%,粒径比为4.55,颗粒体积比为94.2,密度比为7。该超低组分质量分数含量的多组分粉体混合的实际工程的混合技术难度在于:b微细粉体组分质量分数含量为1%;颗粒体积比为94.2,且细粗颗粒密度比为7,混合易形成粗细颗粒分层;超低超重b微细粉体组分混合均匀性相对标准偏差rsd小于5%。一般现有国内外混合设备一般要求配方组分质量分数含量不能小于20%。在此工艺条件下,本专利的连续化啮合反向旋转双螺杆混合机在此工艺条件下的粉体的组分质量分数含量均匀性的相对平均标准偏差rsd与螺杆转速的关联预测控制理论模型为:
本发明发现出口终点粉体混合均匀性评价指标rsd与螺杆转速呈线性负关联协同耦合变化规律,由此可以通过增设螺杆转速传感器和变频转速控制器,基于发明提出的协同耦合关联预测控制理论模型及其在线实时智能纠偏技术,通过粉体混合均匀性评价指标rsd在线实时检测和调控螺杆转速,实现对混合均匀性评价指标(粉体的质量分数含量的相对平均标准偏差rsd)进行在线实时可控混合制造和混合均匀性强化,解决超低组分质量分数含量的多组分粉体混合的均匀性与稳定性难以到达的技术瓶颈。
48.螺杆转速提高至1600rpm,粉体混合出口终点均匀性和稳定性的相对标准偏差rsd可快速达到低于4.95%。本专利的混合均匀性和稳定性强化混合方法和技术成功解决了目前在超低组分含量,且粉体粒径和密度差异巨大的粉体混合均匀性和稳定性难以控制的行业技术难题,提高了生产效率。
49.当螺杆转速由1200rpm增至1600rpm,出口终点粉体混合均匀性评价指标:相对标准偏差rsd由30%减少至4.95%,混合均匀性强化效率高达83.5%,且出口处粉体混合相对标准偏差rsd基本不随时间而波动,具有良好的稳定性。此工艺的双螺杆混合系统的螺杆转速的临界转速为1600 rpm,在此转速条件下,诱发了混合粉体产生很强的∞字型机械流化螺旋混合运动,强化了双螺杆混合的均匀性和稳定性,提高了双螺杆混合系统的混合性能和混合效率,同时也缩短了实现终点混合均匀性和稳定性所需混合停留时间。
50.本实施例中,发明的粉体混合均匀性和稳定性强化方法是将此工艺条件的双螺杆混合转速提高至1600rpm,设计的啮合螺杆间隙由5mm降至1mm,可使出口终点粉体混合均匀性评价指标rsd由48.08%减小为3.5%,且出口终点粉体混合的相对标准偏差随时间趋于不变,基本保持恒定。可完全达到小于5%的均匀性和稳定性技术要求。其出口终点粉体混合均匀性强化幅度高达92.7%,实现了粉体混合出口终点混合的均匀性和稳定可再现性。
51.在混合时间一定条件下,粉体混合出口终点均匀性和稳定性的相对标准偏差rsd随着细粉组分质量分数含量下降而增加。细粉组分质量分数降低,混合性能越差。
52.混合均匀性多点光纤探头近红外光谱检测装置由多通道光纤光源、多通道光纤输入输出模块、多个光纤非接触扩散反射探头、带多光纤信号输入的近红外光谱仪(波长范围970
‑
2500nm)、出口粉体输送流动速度调控模块、数据同步采集模块与数据分析模块组成。
53.混合均匀性在线多点光纤探头近红外光谱检测方法是:配置一定体积的多组分不同配方配比的标准医药粉体样本,在小型混合器内经历长时间充分混合,确保其混合均匀。对混合均匀的多组分每一配比的标准医药粉体样本中,多点微量取样,并通过紫外吸收测定,离线检测各组分含量,每个标准试样检测三次,并计算各空间取样点的组分的质量分数相对标准偏差,标准试样的混合时间要确保标准试样组分的质量分数相对标准偏差小于5%,且组分质量分数与配方配比一致,表明标准试样混合均匀。
54.将已知组分质量分数含量的标准医药粉体样本,在安装六点光纤探头的粉体传送速度可控的移动粉体通道内输送,光纤探头圆型光斑的直径调整为15mm,通道内移动粉体流速控制在50
‑
60cm/s内,在真实运动干扰环境下,进行六点光纤探头近红外光谱检测,每一试样检测三次,以此获得不同含量标准试样的光谱谱峰特征曲线,并确定光谱谱峰特征区分度明显的最佳波长范围。然后采用多元散射校正(msc)、基线修正、标准正则变换
(snv)、15点savizky
‑
golay二阶导数等组合算法,进行数据预处理和多变量数据统计分析,获得预处理和多变量数据统计修正后的不同含量标准试样的修正光谱谱峰特征曲线。
55.本实验的不同含量标准试样光谱谱峰特征曲线的光谱谱峰特征区分度的最佳波长为1638 nm,基于最佳波长1638 nm处的savizky
‑
golay二阶导数光谱谱峰强度与组分质量分数含量关联关系,数据回归获得在真实运动干扰环境下,粉体含量的软预测模型,经多元散射校正(msc)、基线修正、标准正则变换(snv)、15点savizky
‑
golay二阶导数等组合算法进行数据预处理和多变量数据统计分析后,发现savizky
‑
golay二阶导数光谱谱峰强度与混合粉体组分含量关联关系呈线性负关联关系。
56.其中,粉体组分含量软测量的预测模型为:y=a bx式中:y为在线测量粉体组分含量;x为savizky
‑
golay二阶导数光谱谱峰强度,a和b为反映粉体流变特性和连续化双螺杆粉体混合系统影响的回归常数。
57.其中,本实验的某种粉体组分含量软测量的预测模型为:y=
‑
10.146
‑
371441.09x再基于构建的紫外吸收离线静态检测的标准参考试样的各组分含量实测值与真实运动干扰环境下的在线测量粉体组分质量分数预测模型的预测值的关联关系,采用偏最小二乘回归算法,构建混合均匀性多点光纤探头近红外光谱检测装置的在线实时测量的各组分含量软测量值的实测校正预测模型,回归可得一元线性校正预测模型。
58.其中,一元线性校正预测模型为:z=y 0.06331式中:z为一元线性校正预测模型修正后组分质量分数。
59.本实施例中,由六点光纤探头近红外光谱检测装置、测量点的组分预测模型和一元线性校正预测模型,即可进行连续混合出口未知粉体组分体积分数在线实时六点光纤探头近红外光谱检测。
60.其中,全流程可控混合主要是保障双螺杆混合过程中,精密控制各组分质量分数含量与配方质量分数含量高度一致,且各组分的混合均匀性相对标准偏差满足rsd小于5%。
61.以上实施例仅表达了本发明的几种实施方式,其描述较为具体与详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形与改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。