1.本发明涉及一种施加基于振动的力的振动装置。
背景技术:
2.提出过一种基于控制信号来控制电气式的促动器而向人体提示基于振动的力觉的振动装置(例如,参照非专利文献1等)。在这样的振动装置中,即使在用户不想感知到振动的状况下,也会在输入控制信号时持续振动。因此,可考虑设置另外的开关等以使用户能够自由地对促动器的驱动/停止进行操作。
3.现有技术文献
4.非专利文献
5.非专利文献1:tomohiro amemiya,shinya takamuku,sho ito,and hiroaki gomi,“buru
‑
navi3 gives you a feeling of being pulled”,《ntt technical review》(ntt技术评论),2014年11月,第11期,第12卷
技术实现要素:
6.发明所要解决的问题
7.就振动装置而言,根据把持方式的不同,被感知的振动是不同的,因此多数情况下都要求在正确的位置(规定位置)进行把持。但是,若相对于用于向人体提示振动的振动机构另行设置开关机构,就不得不为了对开关进行操作而使手指等人体离开规定位置,开关操作较为繁琐,而且需要重新在规定位置进行把持,因此非常麻烦。这样的问题并限于用于对促动器的驱动/停止进行操作的开关,而是另行设置用于从用户侧进行某些操作输入的操作部的情况所共有的。
8.本发明是鉴于这一点而做出的,其目的在于在向人体提示基于振动的力觉的振动装置中简化来自用户侧的操作输入。
9.用于解决问题的手段
10.本发明中为了解决上述问题而提供一种振动装置,该振动装置具有:基座机构;促动器,其基于被供给来的控制信号进行物理运动;滑动机构,其基于所述促动器的物理运动而相对于所述基座机构向规定方向和所述规定方向的相反方向进行周期性的往复滑动运动,向直接地或间接地接触到的人体的部位施加基于所述往复滑动运动的力;检测部,其相对于所述滑动机构位于所述规定方向,对所述滑动机构所包含的特定部位的位移进行检测。在此,通过从与所述滑动机构直接地或间接地接触的人体的部位向所述滑动机构施加力,所述特定部位能够以比所述往复滑动运动时的振幅大的幅度向所述规定方向移动,当利用所述检测部检测到以比所述往复滑动运动时的振幅大的幅度向所述规定方向进行了移动的所述特定部位时,执行针对所述促动器的驱动控制。
11.发明效果
12.在本发明中,将向人体施加基于往复滑动运动的力的滑动机构沿用作用来对针对
促动器的驱动控制进行操作的机构。由此,能够使向人体提示基于振动的力觉的振动装置的操作简化。
附图说明
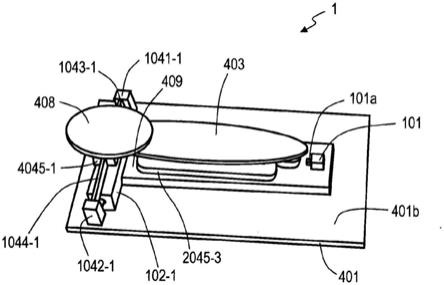
13.图1是对第一实施方式的模拟力觉提示装置进行例示的立体图。
14.图2是对第一实施方式的模拟力觉提示装置进行例示的分解立体图。
15.图3a是对第一实施方式的振动装置的结构进行例示的俯视透视图。图3b是对第一实施方式的振动装置的结构进行例示的主视透视图。
16.图4a及图4b是对第一实施方式的促动器的结构进行例示的示意图。图4a及图4b表示第一实施方式的促动器的3a
‑
3a概略剖面。
17.图5是用于对第一实施方式的振动装置的动作进行例示的图。
18.图6a及图6b是用于对第一实施方式的振动装置的使用状态进行说明的示意图。
19.图7a是对第二实施方式的振动装置的结构进行例示的俯视透视图。图7b是对第二实施方式的振动装置的结构进行例示的主视透视图。图7c是对第二实施方式的振动装置的结构进行例示的左视透视图。
20.图8a及图8b是用于对第二实施方式的振动装置的使用状态进行说明的示意图。
21.图9是对第三实施方式的振动装置的结构进行例示的俯视透视图。
具体实施方式
22.以下,参照附图对本发明的实施方式进行说明。
23.[第一实施方式]
[0024]
首先对第一实施方式进行说明。
[0025]
使用图1至图5对本方式的振动装置1的结构进行说明。如图1至图5例示,本方式的振动装置1具有基部401、促动器102
‑
i(其中,i=1,3)、板簧部1043
‑
1、1044
‑
1、连结部1041
‑
1、1042
‑
1、固定部4045
‑
1、连结部2045
‑
3、台座409、连接部403、接触部408、开关101(检测部)以及控制部103。促动器102
‑
i(其中,i=1,3)具有支承部1026
‑
i、可动部1025
‑
i、连结部102ea
‑
i、连结部102eb
‑
i。
[0026]
包含基部401、台座409、支承部1026
‑
1、1026
‑
3的机构(例如,由它们构成的机构)相当于“基座机构”。包含可动部1025
‑
i、连结部102ea
‑
i、102eb
‑
i(其中,i=1,3)、板簧部1043
‑
1、1044
‑
1、固定部4045
‑
1、连结部2045
‑
3、连接部403以及接触部408的机构(例如,由它们构成的机构)相当于“滑动机构”。“滑动机构”基于促动器102
‑
i的物理运动而相对于基座机构向规定方向(图5:xb4方向)和规定方向的相反方向(xa4方向)进行周期性的往复滑动运动,向直接地或间接地接触到的人体的部位施加基于往复滑动运动的力。本实施方式的滑动机构进行周期性的非对称振动,使人体感知基于往复滑动运动的模拟性力觉。但是,这并不对本发明构成限定。
[0027]
<基部401>
[0028]
就基部401而言,基部401是由abs树脂等合成树脂构成的板状的部件。基部401的例子是安装有电子器件的电子电路基板(例如,智能手机终端装置的电路基板)。在基部401的一个板面401b侧,固定有促动器102
‑
1的底面侧(支承部1026
‑
1的底面侧)以及板状的台
座409的一个板面409a。在台座409的另一个板面409b,固定有促动器102
‑
3的底面侧(支承部1026
‑
3的底面侧)。固定的促动器102
‑
1的长度方向与促动器102
‑
3的长度方向所成的角度为大致90
°
。促动器102
‑
1的长度方向沿基部401的一边配置,促动器102
‑
3的长度方向与该一边大致正交,促动器102
‑
1的中央部分被配置在将促动器102
‑
3沿长度方向延长的位置。
[0029]
<促动器102
‑
i>
[0030]
促动器102
‑
i(其中,i=1,3)具有支承部1026
‑
i、相对于支承部1026
‑
i进行非对称振动的可动部1025
‑
i、与可动部1025
‑
i的长度方向的一端连接或一体地构成并沿该长度方向延伸的棒状的连结部102eb
‑
i、与可动部1025
‑
i的长度方向的另一端连接或一体地构成并沿该长度方向延伸的连结部102ea
‑
i。
[0031]
促动器102
‑
i基于被供给来的控制信号进行物理运动。促动器102
‑
i的结构例如已经被参考文献1(wo2017/183537号公报)等公开。如图4a及图4b例示,促动器102
‑
i是基于被供给来的控制信号进行物理运动的电气式的促动器。
[0032]
如图5例示,可动部1025
‑
i能够以支承于支承部1026
‑
i的状态沿通过连结部102ea
‑
i、102eb
‑
i的d
‑
i轴相对于支承部1026
‑
i进行非对称振动。这些非对称振动的振动方向(d
‑
i轴的轴心方向)均与基部401的板面401b大致平行,d
‑
1轴与d
‑
2轴所成的角度为大致90
°
。
[0033]
<连结部1041
‑
1、1042
‑
1>
[0034]
连结部1041
‑
1、1042
‑
1是柱状的刚体或能够视作刚体的部件。连结部1041
‑
1、1042
‑
1例如由合成树脂构成。配置在支承部1026
‑
1的外部的连结部102ea
‑
1的另一端侧对连结部1042
‑
1的一端侧的侧面进行支承。配置在支承部1026
‑
1的外部的连结部102eb
‑
1的另一端侧对连结部1041
‑
1的一端侧的侧面进行支承。连结部1041
‑
1配置在促动器102
‑
1的长度方向的一端侧的外方,连结部1042
‑
1配置在促动器102
‑
1的长度方向的另一端侧的外方。
[0035]
<板簧部1043
‑
1、1044
‑
1及固定部4045
‑
1>
[0036]
板簧部1043
‑
1及1044
‑
1是由合成树脂构成的板状的弹簧。板簧部1043
‑
1及1044
‑
1的一端分别支承于连结部1041
‑
1、1042
‑
1。板簧部1043
‑
1及1044
‑
1的另一端支承于固定部4045
‑
1。固定部4045
‑
1是具备圆柱状的突部4045a
‑
1的板状的部件。固定部4045
‑
1例如可以由合成树脂构成。突部4045a
‑
1设置在固定部4045
‑
1的外方侧(促动器102
‑
1侧的相反侧)。板簧部1043
‑
1及板簧部1044
‑
1在沿着d
‑
1轴的方向上并列,在板簧部1043
‑
1与板簧部1044
‑
1之间配置有固定部4045
‑
1。
[0037]
<连结部2045
‑
3>
[0038]
连结部2045
‑
3是大致g形的由合成树脂等构成的部件。配置在促动器102
‑
3的支承部1026
‑
3的外部的连结部102ea
‑
3的另一端侧对连结部2045
‑
3的一端2045b
‑
3进行支承。配置在支承部1026
‑
3的外部的连结部102eb
‑
3的另一端侧对连结部2045
‑
3的另一端2045c
‑
3进行支承。连结部2045
‑
3的一端2045b
‑
3及另一端2045c
‑
3还有连结部102ea
‑
3、102eb
‑
3的轴心沿d
‑
2轴配置。在连结部2045
‑
3的另一端2045c
‑
3侧,设置有具备插入孔2045aa
‑
3的支承部2045a
‑
3。插入孔2045aa
‑
3的中心轴的轴心与d
‑
1轴所成的角度以及插入孔2045aa
‑
3的中心轴的轴心与d
‑
2轴所成的角度均为大致90
°
。若对促动器102
‑
3进行驱动,则连结部
2045
‑
3相对于基部201进行沿着d
‑
2轴的非对称振动。
[0039]
<连接部403及接触部408>
[0040]
连接部403是由合成树脂等构成的板状的部件,接触部408是由合成树脂等构成的圆盘状的部件。在连接部403的一端的一个板面4033侧,设置有圆柱状的旋转轴4031。在连接部403的另一端,设置有在板面4033及其背面即板面4032之间贯通的贯通孔4034。贯通孔4034的开口端为圆形,贯通孔4034的内径只要与突部4045a
‑
1的端面的外径大致相同或者在其以上即可。在接触部408的一个板面408b侧的中央,设置有前端部敞开的圆筒状的筒状突起部4081。筒状突起部4081的轴心方向与板面408b大致正交。筒状突起部4081的外径比贯通孔4034的内径稍小,筒状突起部4081的内径与突部4045a
‑
1的端面的外径大致相同。
[0041]
连接部403以板面4033侧朝向台座409的板面409b侧(基部401的板面401b侧)的方式配置。连接部403的旋转轴4031可旋转地支承于插入孔2045aa
‑
3。固定部4045
‑
1的突部4045a
‑
1从板面4033侧插入连接部403的贯通孔4034。接触部408的筒状突起部4081从板面4032侧插入连接部403的贯通孔4034。另外,在筒状突起部4081的内壁面侧,插入固定有在贯通孔4034中贯通的突部4045a
‑
1。由此,连接部403的另一端以及接触部408被安装于固定部4045
‑
1。
[0042]
<开关101>
[0043]
在台座409的板面409b侧,固定有具有按压部101a的开关101。本方式的开关101相对于包含可动部1025
‑
3、连结部102ea
‑
3、102eb
‑
3、连结部2045
‑
3、连接部403以及接触部408的滑动机构位于xb4方向(图5:规定方向),通过检测按压部101a被向xb4方向按压(在本实施方式中是被按下)这一情况来检测滑动机构所包含的支承部2045a
‑
3(特定部位)的位移。即,开关101以其按压部101a朝向按压部101a侧的方式配置。在促动器102
‑
i的可动部1025
‑
i停止、来自弹簧1022
‑
i、1023
‑
i的弹性力相互平衡的状态、以及如后述那样滑动机构基于促动器的物理运动而相对于基座机构向xb4方向(规定方向)和xa4方向(规定方向的相反方向)进行周期性的往复滑动运动的状态下,按压部101a不与支承部2045a
‑
3接触。另一方面,若支承部2045a
‑
3到达至按压部101a,将按压部101a向xb4方向按下,则表示该意思的按下信号(即,表示按压部101a为按下状态的信号)被发送到控制部103,执行后述的针对促动器102
‑
i的驱动控制。例如,开关101被配置在当按压部101a向xb4方向的按下距离超过阈值时信号线短路而使开关接通的位置。开关101的例子是触觉开关等按下开关。
[0044]
<控制部103>
[0045]
在基部401的面401a上安装有控制部103。控制部103是根据从开关101发送来的按下信号而进行针对促动器102
‑
i的驱动控制的装置。控制部103可以仅由电子电路构成,也可以向cpu(central processing unit)中读入规定的程序而构成。控制部103与开关101及促动器102
‑
i电连接。例如,开关101的信号线与控制部103的数字接口端口电连接,控制部103的信号线与促动器102
‑
i的线圈1024
‑
i电连接。而且,控制部103与未图示的电源也电连接。控制部103所进行的针对促动器102
‑
i的驱动控制既可以是促动器102
‑
i的驱动(启动)及停止(关闭)这一驱动模式的控制,也可以是促动器102
‑
i的其它驱动模式的控制。作为其它驱动模式的控制,可以例示向促动器102
‑
i的线圈1024
‑
i供给的控制信号(电流或电压)的大小的控制、控制信号的波形的种类的控制、供给控制信号的促动器102
‑
i的切换控制等。控制部103进行与来自开关101的按下信号的状态相应的驱动控制。例如,控制部103可
以在每次检测到按下信号时都对促动器102
‑
i的驱动及停止(控制信号向线圈1024
‑
i的供给及停止)进行切换,也可以计测所检测出的按下信号的持续时间,并进行与按下信号的持续时间的长度相应的驱动控制。即,也可以执行与利用开关101(检测部)检测到以比往复滑动运动时的振幅大的幅度向规定方向进行了移动的支承部2045a
‑
3(特定部位)的持续时间的长度相应的驱动控制。例如,控制部103可以在按压部101a被短时间按下、所检测出的按下信号的持续时间为阈值以下的情况下设为对促动器102
‑
i进行驱动的驱动模式(向线圈1024
‑
i供给控制信号的模式),在按压部101a被长时间按下、所检测出的按下信号的持续时间超过该阈值的情况下设为使促动器102
‑
i停止的驱动模式(不向线圈1024
‑
i供给控制信号的模式)。或者,也可以预先设定上述例示的三种以上的驱动模式,控制部103根据按下信号的持续时间而对驱动模式进行切换。
[0046]
<动作>
[0047]
使用图5及图6对振动装置1的动作进行说明。使用者以使自己的人体1000的手掌与接触部408的另一个板面408a接触状态、或者将布等夹在人体与板面408a之间的状态把持振动装置1(图6a)。滑动机构(包含可动部1025
‑
i、连结部102ea
‑
i、102eb
‑
i、板簧部1043
‑
1、1044
‑
1、固定部4045
‑
1、连结部2045
‑
3、连接部403及接触部408的机构)基于促动器
‑
i的物理运动而相对于基座机构(包含基部401、台座409、支承部1026
‑
1、1026
‑
3的机构)向规定方向(xb4方向、yb4方向)和规定方向的相反方向(xa4方向、ya4方向)进行周期性的往复滑动运动,向与接触部408直接地或间接地接触的人体1000的部位施加基于往复滑动运动的力。以下,详细进行说明。
[0048]
若促动器102
‑
3进行驱动,则可动部1025
‑
3、连结部102ea
‑
3、102eb
‑
3以及连结部2045
‑
3沿d
‑
2轴在xa4
‑
xb4方向上进行非对称振动(往复滑动运动)。伴随于此,向支承于连结部2045
‑
3的连接部403施加沿着d
‑
2轴的方向的力,且还向支承于连接部403的接触部408施加沿着d
‑
2轴的方向的力。由此,接触部408与可动部1025
‑
3、连结部102ea
‑
3、102eb
‑
3以及连结部2045
‑
3一起进行非对称振动(往复滑动运动)。其结果是,向与接触部408直接地或间接地接触的人体的部位施加基于非对称振动的力。向接触部408施加的沿着d
‑
2轴的方向的力被施加给板簧部1043
‑
1、1044
‑
1以及固定部4045
‑
1。由此,板簧部1043
‑
1、1044
‑
1在沿着d
‑
2轴的方向上弹性变形(挠曲)。由此,能够抑制接触部408的沿着d
‑
2轴的非对称振动被促动器102
‑
1妨碍,能够从支承于连接部403的接触部408高效地提示模拟性力觉。如前所述,在该往复滑动运动时,支承部2045a
‑
3不与开关101的按压部101a接触。
[0049]
另一方面,若促动器102
‑
1进行驱动,则可动部1025
‑
1及连结部102ea
‑
1、102eb
‑
1、1041
‑
1、1042
‑
1沿d
‑
1轴在ya4
‑
yb4方向上进行非对称振动(往复滑动运动)。伴随于此,向支承于连结部1041
‑
1、1042
‑
1的板簧部1043
‑
1、1044
‑
1及固定部4045
‑
1施加沿着d
‑
1轴的方向的力。由此,板簧部1043
‑
1、1044
‑
1与可动部1025
‑
1及连结部102ea
‑
1、102eb
‑
1、1041
‑
1、1042
‑
1一起沿d
‑
1轴在ya4
‑
yb4方向上进行非对称振动(往复滑动运动)。被从连结部1041
‑
1、1042
‑
1施加了沿着d
‑
1轴的方向的力的板簧部1043
‑
1、1044
‑
1将沿着d
‑
1轴的方向的力施加给固定部4045
‑
1。固定部4045
‑
1将该方向的力施加给连接部403及接触部408。由此,连接部403及接触部408进行以连结部2045
‑
3的支承部2045a
‑
3的插入孔2045aa
‑
3为中心的周期性的非对称旋转运动(以与d
‑
1轴及d
‑
2轴大致正交的旋转轴4031为中心的非对称旋转运动)。由此,向与接触部408直接地或间接地接触的人体的部位施加基于非对称旋转运动的
力。另外,可抑制接触部408的沿着d
‑
1轴的非对称振动被促动器102
‑
3妨碍,可向与接触部408直接地或间接地接触的人体的部位高效地施加模拟性力觉。在该往复滑动运动时,支承部2045a
‑
3也不与开关101的按压部101a接触。
[0050]
使促动器102
‑
1及促动器102
‑
3同时驱动的情况也是一样的。
[0051]
另外,如图6b例示,通过从与接触部408直接地或间接地接触的人体1000的部位向接触部408(滑动机构)施加d
‑
21方向的力,支承部2045a
‑
3(滑动机构的特定部位)能够以比上述的往复滑动运动时的振幅大的幅度向d
‑
22方向移动。若这样以比往复滑动运动时的振幅大的幅度向规定方向进行了移动的支承部2045a
‑
3到达开关101的按压部101a,将按压部101a向d
‑
22方向按下(若利用检测部检测到以比往复滑动运动时的振幅大的幅度向规定方向进行了移动的支承部2045a
‑
3),则表示该意思的按下信号被发送给控制部103,控制部103执行前述的针对促动器102
‑
i的驱动控制。注意,无论是否向促动器102
‑
i供给了控制信号(有无促动器102
‑
i的驱动),使用者都能进行该操作。使用者不使手从振动装置1离开或是换手就能进行该操作,操作上的便利性高。
[0052]
另外,如前所述,本方式的滑动机构(包含可动部1025
‑
3、连结部102ea
‑
3、102eb
‑
3、连结部2045
‑
3、连接部403及接触部408的机构)基于促动器102
‑
3的可动部1025
‑
3的物理运动而相对于基座机构(包含基部401、台座409、支承部1026
‑
3的机构)进行往复滑动运动。在此,可动部1025
‑
3经由弹簧1022
‑
3、1023
‑
3支承于支承部1026
‑
3。因此,以比往复滑动运动时的振幅大的幅度向规定方向进行了移动的支承部2045a
‑
3(滑动机构的特定部位)至少能够基于弹簧1022
‑
3、1023
‑
3(弹性体)的弹性力而恢复到基准位置(支承部2045a
‑
3不与开关101的按压部101a接触的位置)。另外,支承部2045a
‑
3被设为还能够经由连接部403通过板簧部1043
‑
1、1044
‑
1的弹性力恢复到基准位置的状态。由此,仅通过将从人体1000向接触部408施加的d
‑
21方向的力减弱(例如,仅通过使人体1000从接触部408离开),支承部2045a
‑
3就会从开关101的按压部101a离开。不需要利用来自人体1000的d
‑
21方向的反方向的力使支承部2045a
‑
3返回到基准位置,因此操作性好。
[0053]
[第二实施方式]
[0054]
对第二实施方式进行说明。本方式是第一实施方式的变形例。第二实施方式与第一实施方式的不同点在于接触部的构造。其它与第一实施方式是相同的。以下,以与此前说明的实施方式的不同点为中心进行说明,对于相同的部分,使用相同的附图标记并省略说明。
[0055]
使用图7a
‑
图7c及图8对本方式的振动装置2的结构进行说明。如图7a
‑
图7c及图8例示,本方式的振动装置2具有基部401、促动器102
‑
i(其中,i=1,3)、板簧部1043
‑
1、1044
‑
1、连结部1041
‑
1、1042
‑
1、固定部4045
‑
1、连结部2045
‑
3、台座409、连接部403、接触部508、开关101及控制部103。促动器102
‑
i(其中,i=1,3)具有支承部1026
‑
i、可动部1025
‑
i、连结部102ea
‑
i、连结部102eb
‑
i。
[0056]
接触部508是刚体或可视作刚体的部件。接触部508包含配置在基部401的一个板面401b侧的第一区域5081、支承于第一区域5081的一端的第二区域5082和支承于第二区域5082的另一端并配置在基部401的另一面401a侧(基座机构的另一面侧)的第三区域5083。第一区域5081、第二区域5082及第三区域5083各自具有大致板状。在本方式中,第一区域5081的大致板状部分与第三区域5083的大致板状部分大致平行地配置,第二区域5082的大
致板状部分与它们大致正交。在第一区域5081的一个板面5081b侧的中央,设置有在第一实施方式中说明的筒状突起部4081。连接部403以板面4033侧朝向台座409的板面409b侧的方式配置。连接部403的旋转轴4031可旋转地支承于插入孔2045aa
‑
3。固定部4045
‑
1的突部4045a
‑
1从板面4033侧插入连接部403的贯通孔4034。接触部508的筒状突起部4081从板面4032侧插入连接部403的贯通孔4034。另外,在筒状突起部4081的内壁面侧,插入固定有在贯通孔4034中贯通的突部4045a
‑
1。由此,第一区域5081支承于固定部4045
‑
1。另外,在第一区域5081与第三区域5083之间,配置有包含台座409、支承部1026
‑
1、1026
‑
3的机构的至少一部分、包含可动部1025
‑
1及连结部102ea
‑
1、102eb
‑
1、1041
‑
1、1042
‑
1的机构的至少一部分以及板包含簧部1043
‑
1、1044
‑
1及固定部4045
‑
1的机构的至少一部分。
[0057]
如图8a例示,使用者用人体1000的手掌对包含台座409、支承部1026
‑
1、1026
‑
3的机构(基座机构)侧进行支承,并且以夹住接触部508的第一区域5081的外方的板面5081a和第三区域5083的外方的板面5083a的方式进行把持。
[0058]
另外,如图8b例示,通过从与接触部508直接地或间接地接触的人体1000的部位向接触部508(滑动机构)施加d
‑
21方向的力,支承部2045a
‑
3(滑动机构的特定部位)能够以比上述的往复滑动运动时的振幅大的幅度向d
‑
22方向移动。若这样以比往复滑动运动时的振幅大的幅度向d
‑
22方向进行了移动的支承部2045a
‑
3到达开关101的按压部101a,将按压部101a向d
‑
22方向押下(若利用检测部检测到以比往复滑动运动时的振幅大的幅度向规定方向进行了移动的支承部),则表示该意思的按下信号被发送给控制部103,控制部103执行前述的针对促动器102
‑
i的驱动控制。
[0059]
[第三实施方式]
[0060]
在第一及第二实施方式中,也可以取代开关101,将对以比往复滑动运动时的振幅大的幅度向xb4方向(规定方向)进行了移动的支承部2045a
‑
3(滑动机构所包含的特定部位)进行检测的传感器用作“检测部”。
[0061]
例如,图9例示的振动装置3将第二实施方式的振动装置2的开关101置换成了传感器301(检测部)。其它与振动装置2是相同的。传感器301是对支承部2045a
‑
3到达位置p这一情况进行检测的传感器。作为传感器301,能够使用激光位移传感器、led传感器、基于磁的位置传感器等。在促动器102
‑
i的可动部1025
‑
i停止、来自弹簧1022
‑
i、1023
‑
i的弹性力相互平衡的状态、以及如后述那样滑动机构基于促动器的物理运动而相对于基座机构向规定方向和规定方向的相反方向进行周期性的往复滑动运动的状态下,支承部2045a
‑
3不到达位置p。另一方面,如图8b例示,若从人体1000向接触部408(滑动机构)施加d
‑
21方向的力,支承部2045a
‑
3(滑动机构的特定部位)以比往复滑动运动时的振幅大的幅度向d
‑
22方向移动,则支承部2045a
‑
3能够到达位置p。支承部2045a
‑
3达到位置p这一情况(支承部2045a
‑
3以比往复滑动运动时的振幅大的幅度向规定方向进行了移动这一情况)会被传感器301检测到,表示该意思的检测信号会被发送给控制部103。控制部103代替第一实施方式的按下信号而按照检测信号来执行前述的针对促动器102
‑
i的驱动控制。其它与第一、第二实施方式是相同的。
[0062]
[其它的变形例等]
[0063]
注意,本发明并不限定于上述实施方式。例如,在第一至第三实施方式中,振动装置1~3向使用者提示模拟性力觉,但振动装置1~3也可以向使用者提示模拟性力觉以外的
力觉。往复滑动运动既可以是前述的非对称振动,也可以是对称振动。
[0064]
另外,在第三实施方式中,传感器301通过检测出支承部2045a
‑
3(滑动机构所包含的特定部位)到达特定的位置p这一情况而检测到以比往复滑动运动时的振幅大的幅度向xb4方向(规定方向)进行了移动的支承部2045a
‑
3,该传感器301被用作“检测部”。然而,只要能够检测到以比往复滑动运动时的振幅大的幅度向xb4方向进行了移动的支承部2045a
‑
3即可,可以将各种传感器用作“检测部”。例如,可以将对滑动机构所含的支承部2045a
‑
3以外的部位的位置进行检测的传感器用作“检测部”,也可以将对与滑动机构所包含的特定部位之间的距离进行检测的传感器用作“检测部”。或者,还可以将对来自安装于滑动机构的永磁铁的磁场的强度进行检测的传感器用作“检测部”。
[0065]
在第一至第三实施方式中,振动装置仅具有一个检测部,但振动装置也可以具有多个检测部(例如,开关、传感器等)。该情况下,使用者对滑动机构施加各方向的力,由此,滑动机构的各特定部位向各方向位移,检测部的一部分或全部对该各特定部位的位移进行检测。通过从与滑动机构直接地或间接地接触的人体的部位向滑动机构施加力,各特定部位能够以比往复滑动运动时的振幅大的幅度向各方向移动。当利用各检测部检测到以比往复滑动运动时的振幅大的幅度向各方向进行了移动的各特定部位时,根据各检测部中的检测的状态,执行针对促动器的各驱动控制。例如,振动装置也可以具有:基座机构;第一促动器,其基于被供给来的第一控制信号进行物理运动;第二促动器,其基于被供给来的第二控制信号进行物理运动;滑动机构,其基于第一促动器的物理运动而相对于基座机构向第一规定方向和第一规定方向的相反方向进行周期性的第一往复滑动运动,向直接地或间接地接触到的人体的部位施加基于第一往复滑动运动的力,并且,基于第二促动器的物理运动而相对于基座机构向第二规定方向和第二规定方向的相反方向进行周期性的第二往复滑动运动,向人体施加基于第二往复滑动运动的力;第一检测部,其相对于滑动机构位于第一规定方向,对滑动机构所包含的第一特定部位的位移进行检测;第二检测部,其相对于滑动机构位于第二规定方向,对滑动机构所包含的第二特定部位的位移进行检测。其中,第一规定方向与第二规定方向不同,例如,第一规定方向与第二规定方向大致正交。通过从与滑动机构直接地或间接地接触的人体的部位向滑动机构施加力,第一特定部位能够以比第一往复滑动运动时的振幅大的幅度向第一规定方向移动。当利用第一检测部检测到以比第一往复滑动运动时的振幅大的幅度向第一规定方向进行了移动的第一特定部位时,执行针对第一促动器和/或第二促动器的驱动控制。通过从与滑动机构直接地或间接地接触的人体的部位向滑动机构施加力,第二特定部位能够以比第二往复滑动运动时的振幅大的幅度向第二规定方向移动。当利用第二检测部检测到以比第二往复滑动运动时的振幅大的幅度向第二规定方向进行了移动的第二特定部位时,执行针对第一促动器和/或第二促动器的驱动控制。
[0066]
上述各种处理不仅可以根据记载按照时间序列执行,也可以根据执行处理的装置的处理能力或需要而并列地或单独地执行。此外,能够在不脱离本发明的主旨的范围内适宜变更,这一点不言自明。
[0067]
上述控制部103例如通过由具备cpu(central processing unit)等处理器(硬件处理器)以及ram(random
‑
access memory)、rom(read
‑
only memory)等存储器等的通用或专用计算机执行规定的程序而构成。该计算机既可以具备一个处理器、存储器,也可以具备
多个处理器、存储器备。该程序既可以安装于计算机,也可以预先存储于rom等。另外,也可以使用不用程序就实现处理功能的电子电路,而不是像cpu这样通过读入程序而实现功能构成的电子电路(circuitry),来构成一部分或全部的处理部。构成一个装置的电子电路也可以包含多个cpu。
[0068]
在利用计算机实现控制部103的情况下,通过程序来记述控制部103所应具有的功能的处理内容。通过用计算机执行该程序,在计算机上实现控制部103的处理功能。记述该处理内容的程序能够预先记录于可由计算机读取的记录介质。可由计算机读取的记录介质的例子是非暂时性的(non
‑
transitory)记录介质。这样的记录介质的例子是磁记录装置、光盘、光磁记录介质、半导体存储器等。
[0069]
该程序的流通例如是通过对记录有该程序的dvd、cd
‑
rom等便携式记录介质进行销售、转让、出借等来进行的。而且,也可以采用预先将该程序存储于服务器计算机的存储装置,通过经由网络从服务器计算机向其它计算机传输该程序而使该程序流通的结构。
[0070]
执行这样的程序计算机例如首先将便携式记录介质中记录的程序或从服务器计算机传输来的程序暂时存储于自己的存储装置。在执行处理时,该计算机读取自己的存储装置中存储的程序,按照所读取的程序执行处理。作为该程序的其它执行方式,也可以由计算机从便携式记录介质直接读取程序,并按照该程序执行处理,而且还可以在每次从服务器计算机向该计算机传输程序时,依次按照所接收的程序执行处理。也可以不从服务器计算机向该计算机进行程序的传输,而是采用通过仅凭该执行指示和结果获取来实现处理功能的所谓的asp(application service provider)型服务来执行上述处理的结构。
[0071]
也可以不在计算机上执行规定的程序来实现控制部103的处理功能,而是用硬件来实现这些处理功能中的至少一部分。
[0072]
附图标记说明
[0073]
1~3 振动装置
[0074]
401 基部(基座机构)
[0075]
409 台座(基座机构)
[0076]
1026
‑
1、1026
‑
3 支承部(基座机构)
[0077]
102
‑
i 促动器
[0078]
1025
‑
i 可动部(滑动机构)
[0079]
102ea
‑
i、102eb
‑
i 连结部(滑动机构)
[0080]
1043
‑
1、1044
‑
1 板簧部(滑动机构)
[0081]
4045
‑
1 固定部(滑动机构)
[0082]
2045
‑
3 连结部(滑动机构)
[0083]
403 连接部(滑动机构)
[0084]
408、508 接触部(滑动机构)
[0085]
101 开关(检测部)
[0086]
301 传感器(检测部)
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。