1.本实用新型涉及点胶固化设备技术领域,更具体的说,涉及一种新型视觉点胶固化装置。
背景技术:
2.多数工件在加工过程中都需要进行点胶和固化的处理,目的是让工件部件紧密结合,如塑料件、液晶屏等,其中点胶是将胶液点涂到部件交接位置处呈线型或非线型状,固化则是在点胶之后,采用uv固化机,将紫外线照射特殊胶水使胶水产生聚合反应从而固化,实际工作过程中,上述两个步骤需要更换不同的设备分别进行加工,一方面更换不同设备会造成定位误差,二是更换设备会延误加工时间,另外在点胶固化处理过程中,对于部件交接位置的定位精度不够准确可靠,难以保证加工质量。
技术实现要素:
3.本实用新型的目的是提供了一种新型视觉点胶固化装置,该装置利用双目 ccd视觉系统,可以提高定位的准确度,同时可以连续对工件进行点胶固化处理,提高点胶固化的工作效率和工作质量。
4.为了实现上述目的,本实用新型采用的技术方案如下:
5.一种新型视觉点胶固化装置,包括底座,所述的底座后方设有固化控制箱且固化控制箱前方的底座上表面设有总控制盒,所述的底座上表面中间位置处两侧均设有安装板且其中一侧安装板外侧设有小型驱动电机,所述的安装板之间设有横向的两条导向杆和一条螺纹传动杆,其中螺纹传动杆位于中心且两条导向杆位于螺纹传动杆两边位置处,所述的安装板上的螺纹传动杆上套装工件滑动座,所述的工件滑动座上方设有治具板,所述的底座上表面四周边角位置处均向上设有支架杆且位于后方一侧的支架杆后方设有小型驱动电机,所述的底座上表面左右同一侧支架杆之间分别设有一条螺纹传动杆和一条导向杆,其中支架杆之间的螺纹传动杆和导向杆之间设有移动安装杆,所述的移动安装杆上依次套装有uv固化灯座和滑动座,所述的uv固化灯座上方通过弹簧控制线与固化控制箱连接,所述的滑动座上表面一侧设有活塞缸且另一侧通过l形连接板向下连接有活塞杆,所述的活塞杆下方连接有凹形连接板,所述凹形连接板凹形面之间设有焦距调整杆且焦距调整杆上套装有两个ccd摄像头,所述的凹形连接板侧面设有红外距离传感器且凹形连接板后侧面上固定有加热筒,所述的加热筒下方连通有电控喷胶阀且电控喷胶阀下方连通有点胶管,所述的加热筒外侧面通过管路连通到胶液筒内部,所述的胶液筒通过弧形连接板固定在滑动座后侧面。
6.进一步,所述的小型驱动电机均与螺纹传动杆传动连接。
7.进一步,所述的移动安装杆两侧均通过套筒分别滑动套装在螺纹传动杆和导向杆上。
8.进一步,所述的焦距调整杆侧面设有刻度线。
9.进一步,所述的凹形连接板前方设有ccd光源。
10.进一步,所述的总控制盒通过线路分别与红外距离传感器、小型驱动电机、固化控制箱、活塞缸以及电控喷胶阀连接,其中活塞缸通过管路与活塞杆连接。
11.与已有技术相比,本实用新型的有益效果如下:
12.本实用新型中的传动结构可以在x、y、z三轴向调整点胶管和uv固化灯座相对于治具板的位置,可以连续对工件进行点胶固化处理,通过设置双目ccd 摄像头,构建空间立体视觉坐标系,可以对工件部件接触位置进行更准确的定位,提高定位的准确度。
附图说明
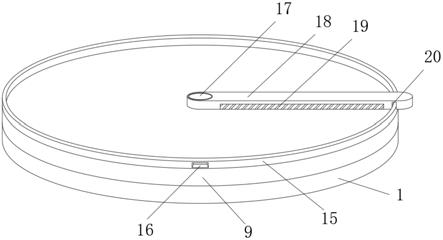
13.图1为本实用新型整体一侧结构示意图;
14.图2为本实用新型整体另一侧结构示意图;
15.图3为本实用新型滑动座前方结构示意图;
16.图4为本实用新型滑动座后方结构示意图;
17.图中:1、底座;2、小型驱动电机;3、工件滑动座;4、治具板;5、螺纹传动杆;6、导向杆;7、移动安装杆;8、uv固化灯座;9、总控制盒;10、弹簧控制线;11、固化控制箱;12、支架杆;13、滑动座;14、活塞缸;15、l形连接板;16、活塞杆;17、ccd摄像头;18、点胶管;19、红外距离传感器;20、胶液筒;21、加热筒;22、电控喷胶阀;23、凹形连接板;24、ccd光源;25、焦距调整杆。
具体实施方式
18.为了使实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本实用新型。
19.如图1到图4所示,一种新型视觉点胶固化装置,包括底座1,底座1后方设有固化控制箱11且固化控制箱11前方的底座上表面设有总控制盒9,底座1 上表面中间位置处两侧均设有安装板且其中一侧安装板外侧设有小型驱动电机 2,安装板之间设有横向的两条导向杆6和一条螺纹传动杆5,其中螺纹传动杆5 位于中心且两条导向杆6位于螺纹传动杆5两边位置处,安装板上的螺纹传动杆 5上套装工件滑动座3,工件滑动座3上方设有治具板4,底座1上表面四周边角位置处均向上设有支架杆12且位于后方一侧的支架杆12后方设有小型驱动电机2,底座1上表面左右同一侧支架杆12之间分别设有一条螺纹传动杆5和一条导向杆6,其中支架杆12之间的螺纹传动杆5和导向杆6之间设有移动安装杆7,移动安装杆7上依次套装有uv固化灯座8和滑动座13,uv固化灯座8上方通过弹簧控制线10与固化控制箱11连接,滑动座13上表面一侧设有活塞缸 14且另一侧通过l形连接板15向下连接有活塞杆16,活塞杆16下方连接有凹形连接板23,凹形连接板23凹形面之间设有焦距调整杆25且焦距调整杆25上套装有两个ccd摄像头17,凹形连接板23侧面设有红外距离传感器19且凹形连接板23后侧面上固定有加热筒21,加热筒21下方连通有电控喷胶阀22且电控喷胶阀22下方连通有点胶管18,加热筒21外侧面通过管路连通到胶液筒20 内部,胶液筒20通过弧形连接板固定在滑动座13后侧面,小型驱动电机2均与螺纹传动杆5传动连接,移动安装杆7两侧均通过套筒分别滑动套装在螺纹传动杆5和导向杆6上,焦距调整杆25侧面设有刻度线,凹形连接板23前方设有 ccd光源24,总控制盒9通过线路分别与红外距离传感器19、小型驱动
电机2、固化控制箱11、活塞缸14以及电控喷胶阀22连接,其中活塞缸14通过管路与活塞杆16连接。
20.实际使用时,将待点胶固化的工件安装固定在治具板4上,通过总控制盒9 的控制面板实时调整待点胶固化的工件相对于点胶管18和uv固化灯座8的位置,具体的通过小型驱动电机2带动螺纹传动杆5传动,分别带动工件滑动座3 改变x轴向相对位置,带动移动安装杆7改变y轴向相对位置,通过红外距离传感器19配合活塞杆16改变z轴向相对位置,接着通过双目ccd摄像头17采集左右多幅图像,根据张正友相机标定法中的方法步骤,利用matlab软件处理图像,建立空间坐标系(具体步骤详见《双目视觉的立体标定方法》、作者:刘俸材、谢明红、王伟;doi:cnki:sun:sjsj.0.2011
‑
04
‑
091),计算出工件交接位置处的视觉空间位置,最后控制电控喷胶阀22开闭利用点胶管18先对视觉空间定位位置处的部件进行点胶操作,再通过固化控制箱11的控制面板控制uv固化灯座8对工件点胶位置处进行照射固化操作。
21.以上显示和描述了本实用新型的基本原理和主要特征以及本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。