1.本发明涉及水上智能无人平台,特别涉及一种水上智能无人餐厅。
背景技术:
2.近年来,随着我国无人智能装备行业的迅猛发展,消费级和工业级无人船的数量与日俱增,人们对物质生活的需求也不断的提高,追求和享受更好的服务。目前供人们就餐的餐厅一般都是建设在陆地上,建设在水中的餐厅更是少之又少,且功能单一,要么只有就餐功能,要么是固定在水中不能移动,且就餐人数较多,不能满足顾客的商务需求,难以给用户带来更好的体验。
技术实现要素:
3.本发明的目的在于提供一种水上智能无人餐厅,减少了人员的复杂性和人为操作的不确定性,保证了私密性和安全性;为使用者提供更多方便、更多乐趣,提高了餐厅的体验和服务;同时也减少了餐厅的人力服务成本,帮助餐厅大大降低能耗,节省资源,实现健康、环保、低碳节能。借助外观的稳定性设计与远程操控装置控制移动操作提高无人餐厅的可靠性,具备人工智能技术、海上通信技术、自主控制技术和长期续航技术,达到真正实现水上智能无人餐厅的目的。
4.包括水上无人平台、智能餐厅、语音交互系统、控制系统,所述智能餐厅设置在水上无人平台上部,包括多边形水上平台、半球形船体,所述多边形水上平台上部设置有雷达、遥控接收机,与控制系统电连接;半球形船体设置在多边形水上平台底部中间位置,半球形船体两侧通过可拼接浮筒连接有四个涵道螺旋桨,与控制系统电连接;半球形船体底部通过整流板升降机构设置有相互垂直的横向整流板、竖向整流板,半球形船体上开设有与横向整流板和竖向整流板对应的相互垂直的凹槽,整流板升降机构与控制系统电连接;所述半球形船体上设置有水流检测器,与控制系统电连接;
5.所述智能餐厅固定在水上无人平台上部,包括用餐区域、娱乐区域、休息区域、厨房区域以及观景区域,与语音交互系统和控制系统电连接,语音交互系统包括音响,与控制系统电连接,实现语音控制;所述智能餐厅设置有智能光线调节系统、智能门、智能灯、智能书架,与语音交互系统和控制系统电连接。
6.所述控制系统包括电气箱与控制箱,所述电气箱包括总开关、电气箱分线板、散热风扇、保险丝、电气箱继电器、电调、电气箱ubec、小开关,所述控制箱包括控制箱分线板、通讯器、通讯模块、控制箱ubec、电流计、水流数据采集装置、gps定位模块、4g数传模块、图传模块、5v电瓶、信号转换开关、主控单元,控制箱分线板、通讯器、通讯模块、控制箱ubec、电流计、水流数据采集装置、gps定位模块、4g数传模块、图传模块、5v电瓶、控制箱继电器、信号转换开关与主控单元电连接,控制箱继电器通过信号转换开关与主控单元电连接;所述半球形船体内部设置有电瓶;电气箱分线板引出多个正负极通道,分别接入散热风扇、控制箱分线板、电气箱继电器,通过电气箱继电器引出八条正负极电线,其中每两条电线分别为
一正一负,接在一个电调上,电调与一个涵道螺旋桨相接。
7.所述水上平台底部设置的四个涵道螺旋桨分两组相对布置,同侧的两组涵道螺旋桨动力组成120度角,分别与控制系统电连接。
8.所述电气箱继电器采用大电流继电器。
9.所述整流板升降机构包括升降电机,与电气箱继电器电连接,所述升降电机为大扭矩减速电机,与控制系统电连接,升降电机通过升降电机固定架固定在水上无人平台四周,升降电机的输出端连接有滚珠丝杠,滚珠丝杠上螺纹连接有整流板固定架,整流板固定架上开有螺纹孔;横向整流板和纵向整流板分别固定在整流板固定架上。
10.所述多边形水上平台内部含有空腔,空腔内部设置有用于水上无人平台之间相对接的近距离对接机构,水上无人平台设置有基于ros的板载计算机,所述近距离对接机构包括前端导向板、后端对接槽、激光雷达扫描仪和摄像头,前端导向板和后端对接槽设置有电磁铁,电磁铁与控制系统电连接;激光雷达扫描仪和摄像头设置在多边形水上平台上部,与主控单元电连接,对接槽开设在水上无人平台侧面,激光雷达扫描仪和摄像头用于进行水上无人平台间的对接定位。
11.所述智能餐厅包括钢化玻璃墙和双层房顶,所述双层房顶包括玻璃层和太阳能板层,太阳能板层设置在玻璃层上部;所述太阳能板层包括用于供能及储能的太阳能板。
12.所述太阳能板层通过自动闭门器固定在智能餐厅的墙壁上;自动闭门器的主体直接固定在太阳能板上,可伸缩摇臂顶部的支座固定在墙壁的内壁上,可伸缩摇臂通过转轴与连杆连接,连杆通过转轴与自动闭门器的主体连接组成一个推拉连杆机构;所述自动闭门器与语音交互系统和控制系统电连接。
13.所述用餐区域设置有桌椅、送餐机器人,墙壁布置有壁画,娱乐区域设置有智能水上幕布、水上喷泉、智能钓台,与语音交互系统和控制系统电连接;所述智能钓台顶部通过电动闭门器、伸缩杆连接有钓鱼舱门,内部为正方形空腔,用于存放鱼竿、升降机构,钓鱼杆支撑架底部与升降机构的顶部固定连接,所述电动闭门器的电机座固定安装在钓台舱门上,伸缩杆两端分别与电动闭门器和钓台连接,钓台舱门通过合页水平横向与钓台空腔内壁连接;电动闭门器与控制系统电连接。
14.所述智能餐厅内部安装有水循环自动冷却系统,包括水帘、水泵和管道,水帘安置在智能餐厅的墙的内壁上,水帘底部设置有收集槽,管道连接水泵和水帘,水泵抽取外围水域的冷水,通过管道从水帘中流过,使室内空气与多空湿润的水帘表面的水分充分接触,利用热湿交换从而达到降温的目的,水流由水帘下方的收集槽收集并通过导管排入周围海域中;所述水泵与控制系统和语音交互系统电连接。
15.本发明的有益效果是:
16.1)本发明通过语音交互系统能够让客户体验更多的生活乐趣,减少了人员的复杂性和人为操作的不确定性,保证了私密性和安全性。
17.2)本发明设置了调光玻璃,室内配置了水上喷泉、智能水上幕布、智能点餐系统和送餐机器人,让游玩更加方便、更具乐趣,提高了餐厅的体验和服务,同时也减少了餐厅的人力服务成本。
18.3)本发明房顶设置有太阳能板层,帮助餐厅大大降低能耗、节省资源,实现健康、环保、低碳节能。
19.4)本发明通过激光雷达扫描仪和摄像头采集的相邻无人餐厅之间的实时位置信息,相邻无人餐厅之间的首位相对准确率,能够提高无人餐厅自主对接准确率。
20.5)本发明通过设置镶嵌式的可升降十字形整流板,通过水流检测器和控制系统协同工作,根据水流的实时信息来控制横向整流板、竖向整流板的下降深度,运用力的相互原理,增加无人餐厅在水中的稳定性。
21.6)本发明通过设计的底部四个120度角的涵道螺旋桨,利用差速原理,可实现全方位移动。
22.7)本发明采用通讯模块收发信号,即通过无线通讯协议,可使用任意相同协议信号接收端,包括手机等设备来对水上无人平台数据进行采集与处理,使数据具有实时性、可观性、共享性。
附图说明
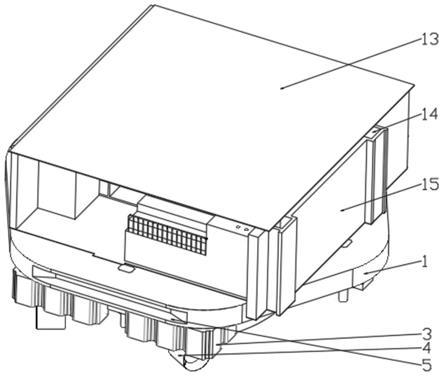
23.图1为本发明实施例提供的水上智能无人餐厅的整体结构图;
24.图2为本发明实施例提供的水上智能无人餐厅的船体结构图;
25.图3为本发明实施例提供的水上智能无人餐厅的底部结构图;
26.图4为本发明实施例提供的水上智能无人餐厅的电气箱结构图;
27.图5为本发明实施例提供的水上智能无人餐厅的控制箱结构图;
28.图6为本发明实施例提供的水上智能无人餐厅的整流板结构细节图;
29.图7为本发明实施例提供的水上智能无人餐厅的整流板升降机构结构图;
30.图8为本发明实施例提供的水上智能无人餐厅的内布置结构示意图;
31.图9为本发明实施例提供的水上智能无人餐厅的控制电路图;
32.其中,
33.1—多边形水上平台,2—前端导向板,3—可拼接浮筒,4—涵道螺旋桨,5—后端对接槽,6—摄像头,7—雷达,8—激光雷达扫描仪,10—遥控接收机,11—半球形船体,12—水流检测器,13—太阳能板层,14—自动闭门器,15—墙壁,16—智能门,17—钢化玻璃墙,101—总开关,102—散热风扇,103—电气箱分线板,104—电气箱ubec,105—保险丝一,106—保险丝二,107—电调一,108—电调二,109—电气箱继电器,110—小开关,111—保险丝三,112—保险丝四,113—保险丝五,114—电调三,115—电调四,201—水流数据采集装置,202—控制箱分线板,203—gps定位模块,204—控制箱ubec,205—通讯模块,206—通讯器,207—控制箱继电器,208—电瓶,209—图传模块,210—主控单元,211—4g数传模块,212—信号转换开关,213—电流计,301—横向整流板,302—竖向整流板,303—螺纹孔,304—整流板固定架,305—大扭矩减速电机,306—滚珠丝杠,401—智能书架,402—壁画,403—智能钓台,404—观赏区域,405—水上喷泉,406—智能水上幕布,407—用餐区域,408—休息区域,501—钓台舱门,502—电动闭门器,503—钓鱼竿,504—升降机构,505—伸缩杆。
具体实施方式
34.为了更好的解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明的技术方案和效果作详细描述。
35.如图1所示,一种水上智能无人餐厅,包括水上无人平台、智能餐厅、语音交互系统、控制系统。所述智能餐厅设置在水上无人平台上部,水上无人平台用于承载智能餐厅,包括多边形水上平台、半球形船体11,如图2所示,所述多边形水上平台1上部设置有雷达7、遥控接收机10,与控制系统电连接。如图3所示,半球形船体11设置在多边形水上平台1底部中间位置,半球形船体11两侧通过可拼接浮筒3连接有四个涵道螺旋桨4,与控制系统电连接;所述可拼接浮筒3能够辅助船体稳定,使船体在全向移动时不发生偏转,从而加强了水上无人平台在行进时的稳定性。半球形船体11底部通过整流板升降机构设置有相互垂直的横向整流板301、竖向整流板302,半球形船体11上开设有与横向整流板301和竖向整流板302对应的相互垂直的凹槽,用于收纳横向整流板301和竖向整流板302;整流板升降机构与控制系统电连接。所述横向整流板301、竖向整流板302用于整合水流,增加餐厅在水中的稳定性,利用力的相互原理增加水上无人平台在水中的侧向稳定性;当船体竖向移动时,通过整流板升降机构将横向整流板301伸出至半球形船体11外部,以增大来自水流横向的阻力,使船体受横向影响较小;当船体横向移动时,通过整流板升降机构将竖向整流板302伸出至半球形船体11外部,以增大来自水流竖向的阻力,使船体受竖向影响较小。所述半球形船体11上设置有水流检测器12,与控制系统电连接。
36.所述多边形水上无人平台可用于承载各种水上设备,可根据具体需求进行改装。
37.所述半球形船体11成半球形,是因为水是流动的,是有阻力的,而对于球体而言,各方向的力是一样的,使其本身受水阻力的影响相对较小且稳定,当全向移动船体时,不必太过考虑来自不同方向的水流所产生阻力的不同对船体的影响。
38.所述水上平台底部设置的四个涵道螺旋桨4分两组相对布置,同侧的两组涵道螺旋桨4动力组成120度角,分别与控制系统电连接,为水上智能无人餐厅提供动力,通过可拼接浮筒3固定在多边形水上平台1的底部。
39.所述控制系统包括电气箱与控制箱,如图4
‑
5所示,所述电气箱包括总开关101、电气箱分线板103、散热风扇102、保险丝、电气箱继电器109、电调、电气箱ubec 104、小开关110,所述控制箱包括控制箱分线板202、通讯器206、通讯模块205、控制箱ubec 204、电流计213、水流数据采集装置115、gps定位模块203、4g数传模块211、图传模块209、5v电瓶208、信号转换开关212、主控单元210,结合图9所示,控制箱分线板202、通讯器206、通讯模块205、控制箱ubec 204、电流计213、水流数据采集装置115、gps定位模块203、4g数传模块211、图传模块209、5v电瓶208、控制箱继电器207、信号转换开关212与主控单元210电连接,控制箱继电器207通过信号转换开关212与主控单元210电连接;总开关101控制着整个电路系统的通断,只有打开总开,才能保证电路系统的畅通。所述遥控接收机与控制箱内的主控单元210电连接,遥控器与主控单元210通过遥控接收机10连接,遥控接收机10接收遥控器的pwm信号后传递给主控单元210;所述gps定位模块203用于水上无人平台的导航、定位,得到水上智能无人餐厅的使用者的经纬度、高度、速度、时间信息,本实施例中gps定位模块203采用正点原子atk218
‑
bd。所述控制系统包括蓝牙模块,本实施例中采用汇承hc
‑
02。本实施例中4g数传模块211采用elfin
‑
eg41a
‑
ca,图传模块209采用aomway欧姆威5.8g 1w图传。
40.控制系统对螺旋桨利用差速能够实现水上平台的360
°
全方位移动并完成通过地面控制站设置的航线,地面控制站通过4g数传模块211与水上平台的控制系统4g连接。使用者的手机与水上无人平台的控制系统通过通讯模块205无线通讯连接或者蓝牙连接,通过
无线通讯连接或者蓝牙通过minibalance_v5.7版软件将目的地发送给水上无人平台的控制系统,控制系统中的主控单元210通过内置的基于模型的路径规划算法即rpm算法计算出路径或者路径点,计算出的路径会作为控制参考,传递给主控单元210去指导水上无人平台下方的螺旋桨实现路径跟随进,从而实现自主巡航和返航。
41.所述半球形船体11内部设置有电瓶208,通过电缆与电气箱相连,直接为电气箱供电,由电缆引出的电线依次连接电气箱中的总开关101、电气箱分线板103,由电气箱分线板103引出多个正负极通道,其中两条正负极电线接入散热风扇102,其作用为为电气箱散热,避免电气箱因过热而产生不必要的风险;由电气箱分线板103引出的其中两条正负极电线接入控制箱分线板202,从而为控制箱供电,在正极电线间加入保险丝五113,主要作用是保护控制箱分线板202及电气箱分线板103不受过电流、过热的伤害,避免其因内部故障所引起的严重伤害;由电气箱分线板103引出其中两条正负极电线接入电气箱继电器109,通过电气箱继电器109引出八条正负极电线,其中每两条电线分别为一正一负,接在一个电调上,一共四个电调,分别是电调一107、电调二108、电调三114、电调四115,每个电调与一个涵道螺旋桨4相接,其中,在涵道螺旋桨4与电调的正极连接线之间接入保险丝,分别是保险丝一105、保险丝二106、保险丝三111、保险丝四112,其作用是保护涵道螺旋桨4和电调不受过电流、过热的伤害,避免其因内部故障所引起的严重伤害,一旦涵道螺旋桨4遇见突发状况,桨叶卷上水草导致桨叶无法转动,保险丝将会及时断开电路,从而使电路避免因短路而电流过大烧坏电路。
42.所述电气箱继电器109采用大电流继电器,作为一种“自动开关”,在电路中起着自动调节、安全保护、转换电路的作用。由主控单元210引出pwm信号线接入电气箱继电器109中,其中pwm信号线为正弦波电压,输出电压为0~5v。所述电调分别引入pwm信号线,由控制箱中的主控单元210引出。所述电调的作用主要是用来接收遥控器或地面控制站传递给主控单元210的指令,并将指令传送给涵道螺旋桨4,从而控制涵道螺旋桨4的启动、停止、加速、减速、正转、反转,从而控制船体的运动状态。需要船体运行时,通过地面控制站或遥控器发送运行指令,主控单元210接收信号并向电气箱继电器109发送pwm信号,使电气箱继电器109连通电路,从而为涵道螺旋桨4供电,当船体向左转时,可通过遥控器或地面控制站使右侧的涵道螺旋桨4转速比左侧的涵道螺旋桨4转速快,当船体向右转时,可通过遥控器或地面控制站使左侧的涵道螺旋桨4转速比右侧的涵道螺旋桨4转速快,这样便能控制船体的运动方向,其中涵道螺旋桨4的转速由电调控制,电调所调电压在0~12v之间,电压越大涵道螺旋桨4转速越快,从而实现差速转动的目的。
43.如图6
‑
7所示,所述整流板升降机构包括升降电机,与电气箱继电器109电连接,所述升降电机为大扭矩减速电机305,与控制系统电连接,升降电机通过升降电机固定架固定在水上无人平台四周,升降电机的输出端连接有滚珠丝杠306,滚珠丝杠306上螺纹连接有整流板固定架304,整流板固定架304上开有螺纹孔303;横向整流板301和纵向整流板分别固定在整流板固定架304上。所述升降电机的转动带动滚珠丝杠306的旋转,通过螺纹连接,实现整流板固定架304在滚珠丝杠306上的上下移动,从而实现横向整流板301和纵向整流板的升降。工作时,升降电机由电气箱继电器109供电,由电气箱继电器109引出正负电线流向电气箱ubec 104,负极从电气箱ubec 104引出分别接到两个升降电机的负极,正极引出依次通过小开关110、控制箱继电器207分别接到两个升降电机的正极。所述控制箱继电器
207实际是一个“常开开关”,当通过它的电压为5v时,控制箱继电器207开关闭合,当通过它的电压为0v时,控制箱继电器207开关断开。升降电机运作时,电气箱继电器109连通电路,向电气箱ubec 104提供12v电压,12v电压通过电气箱ubec 104转变为5v电压流向小开关110,小开关110起到控制电路及保护电路的作用,目的是为了随时可以控制升降电机是否工作;通过小开关110的5v电压流向控制箱继电器207,若继电器电压为5v,则电路是连通的,电机开始工作,若继电器电压为0v,则电路是断开的,升降电机不工作。
44.所述主控单元210选用pixhawk飞控,工作时,需要在输出端接入5v电压,由控制箱分线板202向电流计213提供12v电压,电流计213有转换电压的作用,将12v的电压转换成5v电压提供给主控单元210的输入端,同时由控制箱分线板202向控制箱ubec 204提供12v电压,通过控制箱ubec 204转换为5v电压传送给主控单元210的输出端,主控单元210得以正常工作。
45.所述水流检测器12安装在半球形船体11底部,检测当前水域的流速、流量、水深相关信息控制箱中所述水流数据采集装置115收集由水流检测器12检测到的这些水流数据,水流数据采集装置115将采集到的水流数据传输给主控单元210,主控单元210结合外部的水流数据和遥控器或地面控制站发出的指令决定水上无人平台是否移动、横向整流板301竖向整流板302是否升降。所述雷达7用于探测水面障碍物,将探测到的信息反馈给主控单元210,主控单元210通过预先设定的距离向电调发出指令,调整涵道螺旋桨4的速度,进行障碍物避让。本实施例中所述雷达7采用16线雷达。在水上无人平台运行时,一方面由控制箱分线板202向水流检测器12和雷达7提供12v电压,另一方面由电流计213向水流数据采集装置115提供12v电压,水流数据采集装置115与水流检测器12通过一条信号线连接,雷达7与主控单元210通过一条信号线连接,水流数据采集装置115由三条信号线引出通向主控单元210,水流数据采集装置115采集到的数据与雷达7探测到的信息传递给主控单元210,从而主控单元210发布控制指令。
46.所述4g数传模块211与控制箱分线板202通过正负电线相连,再由三条信号线引出与主控单元210相连接,所述4g数传模块211的作用是既可以接收地面控制站发送给主控单元210的指令,又可将水上智能无人餐厅的姿态、位置实时发送给地面控制站。
47.所述gps与控制箱分线板202通过正负电线相连,再由一根信号线引出与主控单元210相连,在运行时可在地面控制站通过4g数传模块211接收并观察到船体的实时位置。同时在水上无人平台间进行对接时进行精准的定位,然后通过通讯模块205将位置发送给其他的要对接的水上无人平台。
48.所述多边形水上平台1内部含有空腔,空腔内部设置有用于水上无人平台之间相对接的近距离对接机构,水上无人平台设置有基于ros的板载计算机。所述近距离对接机构包括前端导向板2、后端对接槽5、激光雷达扫描仪8和摄像头6,所述前端导向板2和后端对接槽5设置有电磁铁,电磁铁与控制系统电连接;当一个水上无人平台的前端导向板2进入另一个水上无人平台的后端对接槽5时,电磁铁通电,利用磁力吸住导向板,完成两个水上无人平台的对接。激光雷达扫描仪8和摄像头6设置在多边形水上平台1上部,与主控单元210电连接,对接槽开设在水上无人平台侧面,激光雷达扫描仪8和摄像头6用于进行水上无人平台间的对接定位。激光雷达扫描仪8和摄像头6将平台之间的距离和首尾的相对位置信号传递给主控单元210,主控单元210根据激光雷达扫描仪8和摄像头6反馈的信息对电调发
出指令,调整涵道螺旋桨4转速,从而调整平台位置,使当前水上无人平台前端的导向板插入另一水上无人平台尾部的对接槽中完成对接。所述激光雷达扫描仪8为一种探测物体精确位置的传感器,主要是通过对水上无人平台四周的目标物发射激光信号,再根据从物体反射回来的信号时间差来计算这段距离,然后再发射激光的角度来确定物体和发射器的角度,从而得出物体与发射器的相对位置,进而得出平台与目标物之间的相对位置。在对接时,一方面由控制箱分线板202向通讯器206提供12v电压,另一方面由电流计213向通讯模块205提供12v电压,通讯模块205与主控单元210通过三条信号线连接。本实施例中通讯器206是接口形式,为sma
‑
jw无线吸盘天线,通讯模块205是lora无线远程通信433m射频数传电台。运行时,一方面由控制箱分线板202向摄像头6提供12v电压,另一方面由电流计213向图传模块209提供12v电压,摄像头6与图传模块209通过一条信号线连接,摄像头6实时将所拍摄到的画面通过信号线传递给图传模块209,图传模块209通过自身的小天线将所获取的信息发送给地面控制站,以便能在地面控制站的屏幕上实时观看到摄像头6所拍摄的画面。当需要进行智能餐厅之间对接工作时,第一个智能餐厅即当前水上无人平台会通过蓝牙自动搜索第二个水上无人平台并与最近的智能餐厅通信,查看其是否处于空闲状态,选中与需要对接的智能餐厅实时通讯传递自身坐标,当前水上无人平台的板载计算机会自动规划航线靠近第二个水上无人平台,当距离两个水上无人平台的距离时,通过激光雷达扫描仪8和摄像头6来调整无人餐厅之间的相对平行;当距离相近时,前端导向板2伸出,无人餐厅尾部对接槽为喇叭状,智能餐厅根据通过自身携带的gps进行定位,同时摄像头6用来辅助定位,调整自身速度与相邻智能餐厅的位置基本达到一致,第二个智能餐厅的导向板通过对接槽的导向作用插进第一个智能餐厅的尾部对接槽中,通过电磁铁吸住,完成对接。所述智能餐厅固定在水上无人平台上部,包括用餐区域407、娱乐区域、休息区域408、厨房区域以及观景区域,与语音交互系统和控制系统电连接,语音交互系统包括音响,与控制系统电连接,实现语音控制。
49.所述智能餐厅包括钢化玻璃墙17和双层房顶,所述双层房顶包括玻璃层和太阳能板层13,太阳能板层13设置在玻璃层上部,所述太阳能板层13包括用于供能及储能的太阳能板,在阳光充足的时候为设置在智能餐厅内部的电瓶208储电,并转化为无人平台以及智能餐厅用电;太阳能板层13通过自动闭门器14固定在智能餐厅的墙壁15上;自动闭门器14的主体直接固定在太阳能板上,可伸缩摇臂顶部的支座固定在墙壁15的内壁上,可伸缩摇臂通过转轴与连杆连接,连杆通过转轴与自动闭门器14的主体连接组成一个推拉连杆机构。自动闭门器14通过遥控开关控制。所述自动闭门器14与语音交互系统和控制系统电连接。所述玻璃层为调光玻璃,承重效果、隔热隔应效果较好,可以调节灯光强度达到不同效果;当太阳能板层13通过自动闭门器14收起来处于折叠状态时,可以在智能餐厅内部观赏天空以及海面或是湖面,白天利用调光玻璃可遮蔽烈日。所述智能餐厅设置有智能光线调节系统、智能门16、智能灯、智能书架401,与语音交互系统和控制系统电连接,为顾客提供更好的体验。
50.如图8所示,所述用餐区域407设置有桌椅、送餐机器人,墙壁布置有壁画402,娱乐区域设置有智能水上幕布406、水上喷泉405、智能钓台403,与语音交互系统和控制系统电连接;所述智能钓台403顶部通过钓电动闭门器502、伸缩杆505连接有钓鱼舱门,内部为正方形空腔,用于存放钓鱼竿503、升降机构504,钓鱼杆支撑架底部与升降机构504的顶部固
定连接,所述钓电动闭门器502的电机座固定安装在钓台舱门501上,伸缩杆505两端分别与钓电动闭门器502和钓台连接,钓台舱门501通过合页水平横向与钓台空腔内壁连接;钓电动闭门器502与控制系统电连接,由控制系统控制钓电动闭门器502的工作从而实现舱门的打开或闭合。厨房区域设置有智能点餐系统;观赏区域404和智能钓台403包括多级台阶,高于智能餐厅地面,人们在智能钓台403上可以进行垂钓,在观赏区域404交谈、欣赏美景。人通过语音交互系统对智能餐厅内的智能门16、智能灯光、智能书架401、智能水上幕布406、水上喷泉405、智能钓台403发出相应的语音,语音交互系统通过音响接收语音信号并传递给控制系统,控制系统相应的对智能门16、智能灯光、智能光线调节系统、智能书架401、智能水上幕布406、水上喷泉405、智能钓台403发出相应工作指令,如通过语音发出开灯、关灯、改变光线强弱的指令,从而实现声控开灯、关灯、改变光线的视觉效果。
51.所述智能水上幕布406为可触屏操作的幕布,通过触屏,客人可以根据自己喜欢的来选择播放的内容。
52.所述智能餐厅内部安装有水循环自动冷却系统(图中未显示),包括水帘、水泵和管道,水帘安置在智能餐厅的墙的内壁上,水帘底部设置有收集槽,管道连接水泵和水帘,水泵抽取外围水域的冷水,通过管道从水帘中流过,使室内空气与多空湿润的水帘表面的水分充分接触,利用热湿交换从而达到降温的目的,水流由水帘下方的收集槽收集并通过导管排入周围海域中。所述水泵与控制系统和语音交互系统电连接,构成智能空调水冷系统,通过语音控制水循环自动冷却系统的工作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

