智能水质采样无人机系统
【技术领域】
1.本技术涉及一种智能水质采样无人机系统,属于水质检测技术领域。
背景技术:
2.随着智能无人机技术的快速发展,无人机在环境检测、农业植保、军事侦察、航空拍摄和抢险救灾等领域均有广泛应用。随着水资源污染情况愈加严重,智能水质采样无人机可辅助相关部门快速监测水质污染事件。
3.目前的用于水质采样的无人机多采用大型多轴飞行器作为飞行平台,体积较大,对设备运输等带来不便。
技术实现要素:
4.本技术提供了一种智能水质采样无人机系统,通过多旋翼飞行平台作为飞行平台,可以解决飞行平台体积较大,仅能对开阔区域内的水质进行采样的问题;同时,通过任务发布终端控制多旋翼飞行平台执行飞行操作,无需人工手动操作多旋翼飞行平台飞行,并通过降落标识板触发多旋翼飞行平台自动降落至期望降落位置,可以解决手动操作多旋翼飞行平台时飞行效率较低的问题;可以提高飞行平台的飞行效率和降落效率;另外,通过使用采样装置取水,而不是通过水泵和吸管高空抽取水样,可以使得采取到的水质符合水质采样标准,从而提高水质分析的准确性。
5.基于前述内容,本技术提供如下技术方案:提供一种智能水质采样无人机系统,所述系统包括:
6.任务发布终端,用于发布水质采样的飞行任务;
7.与所述任务发布终端通信互连的多旋翼飞行平台,包括视觉传感器,并用于接收所述飞行任务;按照飞行任务指令执行飞行操作;
8.位于所述多旋翼飞行平台底部的可快拆悬挂式采水装置,在所述多旋翼飞行平台飞行过程中带动所述可快拆悬挂式采水装置移动;
9.可拆卸地与所述可快拆悬挂式采水装置连接的采样装置,在所述多旋翼飞行平台飞行至指定采水位置后,所述可快拆悬挂式采水装置将所述采样装置下放预设深度,并在采水完成后提拉所述采样装置;
10.放置在期望降落位置的降落标识板;在采水完成后,所述多旋翼飞行平台通过所述视觉传感器采集所述降落标识板的图像数据,根据所述图像数据进行自主视觉引导降落。
11.可选地,所述可快拆悬挂式采水装置包括:
12.支撑架;
13.安装在所述支撑架上的控制器;
14.安装在所述支撑架中、且与所述控制器相连的驱动组件;
15.安装在所述支撑架中、且与所述驱动组件的动力输出轴相连的绞线盘,所述绞线
盘上缠绕有绳索,所述绳索的一端与所述采样瓶相连;所述动力输出轴在运行过程中带动所述绞线盘旋转,以使所述绳索的一端下放或提升。
16.可选地,所述采样瓶上设置有固定柱;所述支撑架底部具有通孔和位于所述通孔上方的定滑轮,所述绳索的一端通过所述定滑轮与所述固定柱相连;所述通孔的尺寸大于所述固定柱的尺寸以使所述固定柱穿过所述通孔。
17.可选地,所述采样瓶还包括固定板,所述固定柱位于所述固定板上;所述支撑架的底部还安装有微动开关,所述微动开关的开关驱动杆穿过所述支撑架的底部;所述微动开关与所述驱动组件相连;
18.在所述采样瓶上升至靠近所述可快拆悬挂式采水装置的情况下,所述固定板与所述开关驱动杆接触,以触发所述微动开关控制所述驱动组件停止运行。
19.可选地,所述驱动组件包括:
20.行星减速箱,所述行星减速箱与所述控制器中的编码器相连;
21.无刷电机,所述无刷电机的转子位于所述行星减速箱内,以使所述行星减速箱将所述无刷电机的输出转速降至期望速度;
22.与所述行星减速箱相连的无刷电调,用于根据控制信号调节所述驱动组件的驱动速度。
23.可选地,所述多旋翼飞行平台包括:
24.机架,所述机架采用共轴双桨结构安装螺旋桨;
25.安装于所述机架上的飞控装置、定位装置、电源装置、通讯装置和机载终端。
26.可选地,所述机架上具有折叠结构,所述折叠结构的一端上设置有所述螺旋桨。
27.可选地,所述多旋翼飞行平台还包括安装在所述机架上的深度相机和运动追踪相机;
28.所述深度相机采集的深度点云数据用于供所述多旋翼飞行平台进行障碍物规避;
29.所述运动追踪相机用于在所述定位装置失效时,供所述多旋翼飞行平台确定位姿信息。
30.可选地,所述系统还包括与所述任务发布终端和所述多旋翼飞行平台分别通信相连的服务器;
31.所述多旋翼飞行平台,还用于将采集到的图像数据发送至所述服务器;
32.所述服务器,用于获取所述图像数据并存储。
33.可选地,所述服务器还用于:
34.接收所述采样装置采集的水质的样本数据;
35.对所述样本数据进行样本分析,得到水质分析结果;
36.将所述水质分析结果发送至指定终端。
37.本技术的有益效果在于:通过设置任务发布终端、与任务发布终端通信互连的多旋翼飞行平台、位于多旋翼飞行平台底部的可快拆悬挂式采水装置、可拆卸地与可快拆悬挂式采水装置连接的采样装置以及放置在期望降落位置的降落标识板;可以解决在狭长河道等采样场景受限的问题;通过任务发布终端发送对多旋翼飞行平台的控制指令,自主飞行至预定地点完成采样,并通过降落标识板引导多旋翼飞行平台自主降落至期望降落位置。此套系统可以提高水质采样作业效率与安全性;通过使用采样装置采集水样,而不是通
过水泵和吸管高空抽取水样,可以使得采取到的水质符合水质采样标准,提高水质分析的准确性。
38.上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,并可依照说明书的内容予以实施,以下以本技术的较佳实施例并配合附图详细说明如后。
【附图说明】
39.图1是本技术一个实施例提供的智能水质采样无人机系统的结构示意图;
40.图2是本技术另一个实施例提供的智能水质采样无人机系统的结构示意图;
41.图3是本技术一个实施例提供的多旋翼飞行平台降落过程的示意图;
42.图4是本技术一个实施例提供的多旋翼飞行平台的结构示意图;
43.图5是本技术一个实施例提供的可快拆悬挂式采水装置的结构示意图;
44.图6是本技术另一个实施例提供的可快拆悬挂式采水装置的结构示意图;
45.图7是本技术一个实施例提供的可快拆悬挂式采水装置控制采样装置采水的流程图。
【具体实施方式】
46.下面结合附图和实施例,对本技术的具体实施方式作进一步详细描述。以下实施例用于说明本技术,但不用来限制本技术的范围。
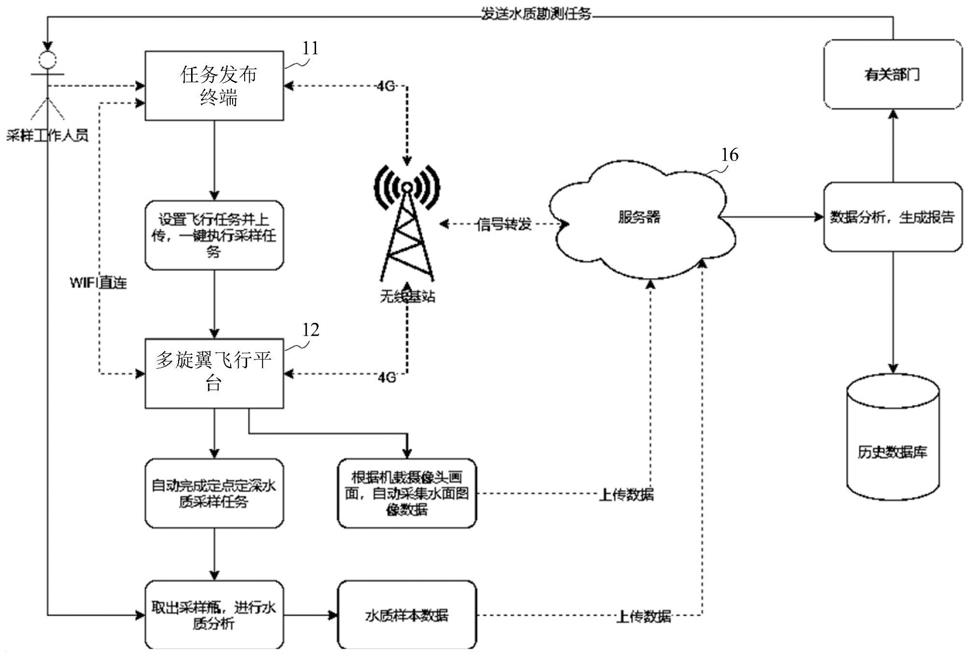
47.图1和图2是本技术一个实施例提供的智能水质采样无人机系统的结构示意图。如图1所示,该系统至少包括:任务发布终端11、多旋翼飞行平台12、可快拆悬挂式采水装置13、采样装置14和降落标识板15。
48.可选地,任务发布终端11可以是手机、计算机、平板电脑等具有通信功能和人机交互功能的电子设备。任务发布终端11用于发布水质采样的飞行任务。
49.飞行任务包括飞行目的地的位置信息(指定采水位置的位置信息)和水质采样深度。可选地,飞行任务还包括飞行速度、飞行高度等,本实施例不对飞行任务包括的内容作限定。
50.可选地,飞行任务可以是用户通过任务发布终端11设置的;或者是服务器发送至任务发布终端11的,此时,系统还包括服务器16,服务器16与任务发布终端11通过移动网络通信相连,如:通过4g网络、5g网络或者下一代的移动网络等通信相连。
51.多旋翼飞行平台12与任务发布终端11通信互连。可选地,多旋翼飞行平台12与任务发布终端11之间可以通过无线网络相连、或者通过移动网络通信相连,本实施例不对多旋翼飞行平台12与任务发布终端11之间的通信连接方式作限定。
52.多旋翼飞行平台12用于接收飞行任务;按照飞行任务指令执行飞行操作。本实施例中,以多旋翼飞行平台12为八轴共浆四轴飞行器为例进行说明。
53.本实施例中,多旋翼飞行平台12包括视觉传感器。视觉传感器用于供多旋翼飞行平台12采集降落标识板15的图像数据,以按照该图像数据降落在期望降落位置。其中,降落标识板15放置在期望降落位置。
54.具体地,在采水完成后,多旋翼飞行平台通过视觉传感器采集降落标识板的图像数据,根据图像数据进行自主视觉引导降落。
55.比如:参考图3,在多旋翼飞行平台12位于降落标识板15的左上方时,视觉传感器采集到包括降落标识板15的图像数据;根据降落标识板15在图像数据中的位置,可以确定出多旋翼飞行平台12与降落标识板15之间的相对位置关系;多旋翼飞行平台12根据该相对位置关系调整位置,直至调整至位于降落标识板15正上方时,执行垂直下落操作,以降落至降落标识板15放置的位置。
56.需要补充说明的是,多旋翼飞行平台12在调整位置时,也可以执行下落操作。
57.示意性地,降落板标识板尺寸为1000mm*1000mm*1mm的pc板,印刷图案为aruco二维标签,四角二维码id顺时针依次为0,1,2,3;中心二维码id为4;标识板表层喷涂哑光半透明喷漆;四边黏着布基胶带固定。
58.可选地,感知传感器包括旋转式激光雷达和/或下置式单目摄像头,本实施例不对视觉传感器的实现方式作限定。
59.在一个示例中,参考图4,多旋翼飞行平台12包括:机架121,机架采用共轴双桨结构安装螺旋桨122;安装于机架121上的飞控装置123、定位装置(图中未示出)、电源装置124、通讯装置(图中未示出)和机载终端125。
60.螺旋桨122的数量为8个,机架121包括4个旋翼轴,每个旋翼轴上安装有两个螺旋桨122,这两个螺旋桨122的扭矩方向相反,采用共轴双桨结构安装在机架上。
61.可选地,机架121上具有折叠结构,折叠结构的一端上设置有螺旋桨。本实施例中,通过设置折叠结构,便于携带和运输。
62.示意性地,多旋翼飞行平台的轴距为750mm,最大尺寸为1000mm*1000mm*530mm,共轴双桨两桨叶距离为120mm。桨叶使用15寸可折叠桨叶,电机型号为4112kv320。
63.飞控装置123是飞行器的电子控制部分,飞控装置123通常包括主控处理器和惯性导航模块(即传感器模块)。主控处理器与任务发布终端11通信相连。飞控装置123用于根据传感数据和/或任务发布终端11发送的操作指令,使用飞行算法控制多旋翼飞行平台12的稳定运行。示意性地,飞控装置123使用stm32f765主控芯片。
64.可选地,飞控装置123安装在多旋翼飞行平台12的重心位置。
65.定位装置使用全球导航卫星系统(global navigation satellite system,gnss)获取多旋翼飞行平台12的绝对定位信息,从而确定多旋翼飞行平台12是否到达指定采水位置。
66.电源装置124可以为储能电池,在其它实施例中,电源装置124还可以包括太阳能电池板、燃料电池等,本实施例不对电源装置124的实现方式作限定。示意性地,电池容量为12000mah,6s2p构成。
67.通讯装置用于供多旋翼飞行平台12与其它设备进行通信连接。可选地,通讯装置可以为4g通讯模块,4g远程控制模块安装于机架后下方,以天线为中心方圆50mm内无金属零件遮挡。
68.机载终端125或称机载电脑用于对多旋翼飞行平台12上的各个信息进行读取、处理、传递、显示和控制。比如:对多旋翼飞行平台12的指令和传感数据进行读取、处理、传递、显示和控制。机载终端125与飞控装置123相连,且与任务发布终端11通信相连。
69.可选地,机载终端125安装在机架中心板正上方。机载终端125的配置为i7处理器,软件安装自主避障、引导降落、远程控制等软件包。
70.在一个示例中,旋转式激光雷达126安装在机载终端外壳正上方,旋转轴与多旋翼飞行平台12z轴重合。下置摄像头视野画面与地面平行。
71.参考图4,多旋翼飞行平台还包括安装在机架上的传感器设备。传感器设备包括深度相机127和运动追踪相机128。深度相机采集的深度点云数据用于供多旋翼飞行平台进行障碍物规避;运动追踪相机用于在gps定位装置失效时,供多旋翼飞行平台确定位姿信息。在一个示例中,深度相机与运动追踪相机面向正前方安装,距离地面高度约为450mm。
72.在实际实现时,传感设备还可以包括其它传感器,本实施例在此不再一一列举。
73.可选地,在系统还包括与任务发布终端和多旋翼飞行平台分别通信相连的服务器16时,多旋翼飞行平台还用于将采集到的图像数据发送至服务器16;相应地,服务器用于获取图像数据并存储。
74.可快拆悬挂式采水装置13位于多旋翼飞行平台12底部,在多旋翼飞行平台12飞行过程中带动可快拆悬挂式采水装置13移动。
75.采样装置14可拆卸地与可快拆悬挂式采水装置13连接,在多旋翼飞行平台飞行至指定采水位置后,可快拆悬挂式采水装置将采样装置下放预设深度,并在采水完成后提拉采样装置。
76.在一个示例中,参考图5,可快拆悬挂式采水装置13包括:
77.支撑架131;
78.安装在支撑架131上的控制器132;
79.安装在支撑架131中、且与控制器131相连的驱动组件133;
80.安装在支撑架131中、且与驱动组件133的动力输出轴相连的绞线盘134,绞线盘134上缠绕有绳索(图中未示出),绳索的一端与采样瓶14相连;动力输出轴在运行过程中带动绞线盘134旋转,以使绳索的一端下放或提升。
81.绳索可以为尼龙绳或者其它材质的绳索,本实施例不对绳索的材质和类型作限定。
82.此时,可快拆悬挂式采水装置通过四个云台支撑架131与多旋翼飞行平台12中心板连接,采样装置可通过快拆扣与悬挂式采水装置快速装配。
83.具体地,参考图5和图6,采样瓶14上设置有固定柱141。支撑架131底部具有通孔135和位于通孔135上方的定滑轮137,绳索的一端通过定滑轮137与固定柱141相连。通孔135的尺寸大于固定柱141的尺寸以使固定柱141穿过通孔135,通孔135的尺寸大于固定柱141的尺寸以使固定柱141穿过通孔135。
84.采样瓶14还包括固定板142,固定柱141位于固定板142上;支撑架131的底部还安装有微动开关136,微动开关136的开关驱动杆穿过支撑架131的底部;微动开关136与驱动组件133相连;在采样瓶14上升至靠近可快拆悬挂式采水装置13的情况下,固定板142与开关驱动杆接触,以触发微动开关控制驱动组件停止运行。
85.如图5所示,驱动组件133包括:行星减速箱1331,行星减速箱1331与控制器中的编码器相连;无刷电机1332,无刷电机的转子位于行星减速箱1331内,以使行星减速箱1331将无刷电机1332的输出转速降至期望速度;与行星减速箱1331相连的无刷电调1333,用于根据控制信号调节驱动组件的驱动速度。示意性地,电子调速器的电流为40a。
86.示意性地,支撑架131最大尺寸为200mm*200mm*100mm,无刷电机尺寸为3508搭配
1:30行星减速箱;绞线盘支架30mm;滑轮槽宽5mm,直径10mm;尼龙绳最大长度为12m;采样瓶容积为200ml;固定板最大尺寸为100mm*50mm*20mm,通过杠杆原理,当采样瓶位于顶部时,挤压上侧的采样瓶固定板,即刻使固定板加紧瓶身,起到固定作用。
87.为了更清楚地理解水质采样过程,下面对采样过程进行举一个实例进行介绍。参考图7,水质采样过程包括以下几个步骤:
88.步骤71,在到达指定采水位置后,多旋翼飞行平台向可快拆悬挂式采水装置发送采样指令;可快拆悬挂式采水装置控制绞线盘顺时针旋转,根据编码器读取需要释放的绳索长度,在释放的绳索长度与水质采样深度相同时,控制驱动组件停转。
89.步骤72,确定采样装置是否完成采样;若是,则执行步骤72,若否,则再次执行本步骤;
90.可快拆悬挂式采水装置确定采样装置是否完成采样可以是确定采样时长是否达到预设时长,比如3秒或者其它数值,本实施例不对预设时长的取值作限定。
91.步骤73,可快拆悬挂式采水装置控制绞线盘逆时针旋转,以收缩绳索长度,在绳索带动采样装置上升过程中,若固定板接触微动开关,则触发驱动组件停转,采样结束。
92.可选地,在系统还包括服务器16时,服务器还用于:接收采样装置采集的水质的样本数据;对样本数据进行样本分析,得到水质分析结果;将水质分析结果发送至指定终端。
93.其中,指定终端可以是水质监测部门使用的终端,当然,也可以其它用户使用的终端,本实施例不对指定终端的类型作限定。
94.基于上述系统架构,本实施例以一次水质采样过程为例进行说明,该过程包括:
95.步骤1,有关部分发布水质勘测任务,采样工作人员获取到该水质勘测任务后,用户到达采样点周围,放置地面降落板,展开飞行器,取下传感器保护罩,安装完成润洗的采样装置,打开地面站电源,飞行器通电,确保多旋翼飞行平台与地面成功连接;通过任务发布终端发布飞行任务;
96.步骤2,多旋翼飞行平台起飞,飞达指定位置进行水样定点定深采集,采样完成后,返航,在起飞点上空进行视觉引导的自主降落,返回起飞点。待飞机螺旋桨停转后,采样人员取下采样装置,通过分析得到水质样本数据;前置及下视摄像头在进行航点飞行时,采集图像数据。所得数据自动上传服务器。
97.步骤3,服务器根据算法模型,完成对原始数据分析,生成水质报告,自动推送至指定终端。
98.综上所述,本实施例提供的智能水质采样无人机系统,通过设置任务发布终端、与任务发布终端通信互连的多旋翼飞行平台、位于多旋翼飞行平台底部的可快拆悬挂式采水装置、可拆卸地与可快拆悬挂式采水装置连接的采样装置以及放置在期望降落位置的降落标识板;可以解决在狭长河道等采样场景受限的问题;通过任务发布终端发送对多旋翼飞行平台的控制指令,自主飞行至预定地点完成采样,并通过降落标识板引导多旋翼飞行平台自主降落至期望降落位置。此套系统可以提高水质采样作业效率与安全性;通过使用采样装置采集水样,而不是通过水泵和吸管高空抽取水样,可以使得采取到的水质符合水质采样标准,提高水质分析的准确性。
99.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存
在矛盾,都应当认为是本说明书记载的范围。
100.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
101.上述仅为本技术的一个具体实施方式,其它基于本技术构思的前提下做出的任何改进都视为本技术的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

