1.本发明属于太阳能无人机技术领域,涉及一种柔性太阳能板可折叠无人浮空器。
背景技术:
2.太阳能无人机是一种利用太阳辐射为能源的电动飞行器,是航空科学技术与新能源技术相结合的产物。太阳能无人机白天依靠太阳能电池板将太阳能转化为电能,维持动力系统、航电设备及有效载荷的运行,同时利用剩余能量为机载电池充电;夜间利用机载电源中存储的能量维持整个无人机的正常运行。能源动力系统以一天为一个循环,不需消耗任何燃料,因此太阳能无人机具有数周至数月的超长续航。相比常规无人机,太阳能无人机优势明显,应用前景非常广阔,甚至可以充当“大气层卫星”的角色。太阳能无人机在军事方面可用于侦查和巡逻,在民用方面可用遥感探测和通讯中继。
3.中国发明专利cn108557081a公开了“一种太阳能连翼无人机及其控制方法”,其主要包括:尾撑杆、机翼和吊舱组件,主要用于解决现有超大展弦比无人机结构强度差、设计困难和现有无人机是单纯的电动机控制,不能配合舵机实现综合控制的问题,虽然该太阳能无人机在控制方面具有优势,但其不能实现垂直起降,大大限制了该太阳能无人机的使用范围。
4.中国发明专利cn108762313a公开了“太阳能无人机拖拽式太阳电池电磁折叠收纳方法”,该专利将通过绳索或者连接杆拖拽的太阳能电池转变成了通过电磁折叠收纳的方法,使得从人工处理变成了自动收纳,但是太阳能电池板依然为拖拽式外置结构,这样使得无人机在起飞和降落的过程中极其不稳定,而且这种拖拽式结构也不适合安装在垂直起降的无人机上。
5.综上,目前大多数太阳能无人机均采用固定翼的布局,在起飞和着陆时均需要滑跑跑道,滑跑跑道大大的限制了固定翼太阳能无人机的使用范围,由于太阳辐射强度较弱,太阳能电池板的光电转化率也较低,太阳能无人机为了在有限的许用功率下维持正常飞行和工作就需要将太阳能电池板的面积变大,目前有两种方式解决这一问题,其一将太阳能电池板放置与机翼上方,这样大多会采用轻质机翼,这样会使得机翼的强度变弱,造成太阳能无人机的稳定性降低,其二采用折叠结构,目前的折叠结构都是在无人机后拖拽一个太阳能结合板,这样也使得太阳能无人机的整体性与稳定性降低。为了解决以上问题,设计出一款兼具垂直起降和太阳能板可折叠的太阳能无人机就显得尤为重要。
技术实现要素:
6.本发明的目的是提供一种柔性太阳能板可折叠无人浮空器,能垂直起降,起飞和着陆过程中柔性太阳能结合板收纳进机体中,高空作业时柔性太阳能结合板展开工作。
7.本发明所采用的技术方案是,一种柔性太阳能板可折叠无人浮空器,包括机身,机身包括相互垂直的收纳臂和固定臂,收纳臂和固定臂形成“十”字交叉状,形成的“十”字交叉处固定有椭球形的主体,收纳臂与固定臂的两端的上下两侧分别设置有旋翼和航行灯,
主体上对应收纳臂和固定臂之间的位置处均设置有旋转支架,旋转支架上设置有柔性太阳能结合板,旋转支架旋转角度为90
°
,即就是收纳臂与固定臂之间夹角,柔性太阳能结合板在旋转支架上展开后呈夹角为90
°
的扇形。
8.本发明的特征还在于,
9.主体对应收纳臂与固定臂之间的位置处安装有旋转支架固定轴和电机固定轴,旋转支架固定轴上通过轴承旋转连接旋转支架,旋转支架上设置有啮合齿,电机固定轴上套设有旋转电机,旋转电机上连接有齿轮,齿轮和啮合齿啮合;
10.旋转支架包括n个环形的旋转片,多个旋转片由下到上套均设在轴承上,多个旋转片在展开时,第一个旋转片不需要转动即第一个旋转片不刻啮合齿,第二个旋转片刻有啮合齿以实现0
°
到(90/n
‑
1)
°
,第三个旋转片刻有啮合齿以实现0
°
到2*(90/n
‑
1)
°
的旋转,以此类推第n个旋转片刻侧壁上刻有啮合齿以实现0
°
到90
°
的旋转,旋转片远离啮合齿的一侧固定有旋转扇叶,每个旋转片均与齿轮啮合,每个旋转扇叶均与水平面垂直,旋转扇叶上方沿其长度方向均匀固定有多个折叠件,折叠件在旋转扇叶上呈对称分布,折叠件的两端分别位于旋转扇叶的两侧,折叠件的两端分别固定连接有折叠臂,位于同一旋转扇叶同一侧的相邻两个折叠臂共同连接有柔性太阳能结合板,相邻两个旋转扇叶相靠近的一侧对应的折叠臂通过铰链铰接;
11.折叠件包括固定在旋转扇叶上的基座,基座设置为“凹”型的板式结构,基座“凹”型的两侧内部设置为半圆形,基座两侧的半圆形上设置有啮合齿,旋转扇叶上设置有基座安装孔,基座穿过一端基座安装孔并将“凹”型口处卡在基座安装孔内,基座两端的啮合齿上均啮合有旋转板,旋转板通过铰接连接有连接臂,折叠臂固定在连接臂上,旋转板包括两块形状相同的筋板,两块筋板下端通过铰链连接后铰接在基座上,两块筋板中间固定有过渡齿轮,过渡齿轮与基座上的啮合齿啮合,两块筋板远离旋转扇叶的一端铰接连接臂,连接臂连接筋板的一端设置有与过渡齿轮啮合的啮合齿;
12.旋转扇叶上端还固定设置有水平的且沿旋转扇叶长度方向设置的结合板,结合板的宽度与旋转扇叶展开后同一旋转扇叶两侧柔性太阳能结合板之间的间距相同,结合板上铺设有柔性太阳能结合板。
13.收纳臂位于主体的两端的两侧均设置有太阳能板收纳舱,固定臂位于主体的两端的两侧均设置有太阳能板固定舱,太阳能板收纳舱和太阳能板固定舱内均设置有液压固定结构,液压固定结构包括在太阳能板收纳舱和太阳能板固定舱上下两侧壁对应设置的电动液压伸缩杆,位于上下两侧的电动液压伸缩杆的伸出端相对应设置且均固定连接有固定柱,旋转扇叶收缩至太阳能板收纳舱或太阳能板固定舱内时,旋转扇叶上对应电动液压伸缩杆的位置处设置有固定孔,固定柱伸入固定孔中;每个旋转扇叶上下两侧还设置有滑块,太阳能板收纳舱和太阳能板固定舱内对应滑块的位置处设置有滑轨。
14.还包括设置在机身上的飞行控制器和电源管理模块,飞行控制器和电源管理模块通过导线电连接,多个柔性太阳能结合板通过导线串联后通过导线连接电源管理模块,电源管理模块通过线缆电连接有电池组a和电池组b,电池组b和飞行控制器分别通过导线分别连接旋翼、航行灯、电动液压伸缩杆以及旋转电机。
15.主体上下方还分别设置有机载通信天线和光电吊舱,机载通信天线和光电吊舱通过分别通过导线连接电池组a。
16.固定臂和收纳臂位于主体两侧中间位置的下方均设置有起落架舱,起落架舱上安装有电动起落架舱门,收纳臂的起落架舱内安装有起落架a,固定臂的起落架舱内安装有起落架b,电动起落架舱门、起落架a、起落架b通过导线连接电池组b和飞行控制器。
17.起落架a和起落架b结构相同,均包括固定安装在起落架舱内的液压杆旋转轴、支撑臂旋转轴以及立柱旋转轴,液压杆旋转轴、支撑臂旋转轴、立柱旋转轴上分别铰接有电动液压杆a、支撑臂a、立柱,电动液压杆a的另一端铰接在立柱上部,支撑臂a的另一端共同交接有支撑臂b和锁死装置,锁死装置的另一端铰接在电动液压杆a与立柱连接的铰链上,锁死装置通过包括通过铰链连接两个连接杆,两个连接杆的另一端分别铰接在支撑臂a和支撑臂b铰接的铰链上以及电动液压杆a与立柱连接的铰链上,支撑臂b另一端铰接在立柱下部,立柱另一端安装有减震弹簧,减震弹簧远离机身的一侧安装有机轮,电动液压杆a通过导线连接电池组b和飞行控制器;
18.起落架a与起落架b的区别在于起落架a为单机轮结构,起落架b为双机轮结构,其中起落架a向前后方向收纳,起落架b向左右方向收纳。
19.起落架舱门包括三片门板,第一片门板与起落架舱铰接,且第一片门板还铰接有电动液压杆b,电动液压杆b另一端铰接在立柱,第二片和第三片门板之间通过铰链连接,第二片门板的内侧两端还铰接有连接臂,第三片门板内侧铰接有电动液压杆c,电动液压杆c另一端铰接在立柱下端,电动液压杆b、电动液压杆c分别通过导线连接电池组b和飞行控制器。
20.旋翼包括旋翼外壳,旋翼外壳与收纳臂和固定臂的末端相连接,旋翼外壳的下方设置有散热口,旋翼外壳中安装有螺旋桨电机,螺旋桨电机通过桨毂电机连接臂连接有桨毂,桨毂通过桨毂桨叶连接臂连接桨叶,桨毂的外面安装有桨帽,其中螺旋桨电机通过导线连接有电子调速器,电子调速器通过导线连接电池组b和飞行控制器。
21.氢燃料电池还通过导线连接有电源管理模块,氢燃料电池通过第一进气管连接有储氢罐,氢燃料电池还通过第二进气管连接有压气机,压气机上设置有进气口,进气口连接有氧气管,储氢罐上还设置有加氢口。
22.本发明的有益效果是:
23.本发明的太阳能无人浮空器可以垂直起降,起飞和着陆的过程中不需要跑道,使得其使用场景更加的丰富,在起飞和着陆过程中柔性太阳能结合板收纳进无人浮空器收纳臂中,可以使其在起飞和着陆的过程中受力面积更小,着陆和起飞更加顺利,在高空作业时柔性太阳能结合板自动展开工作,简单方便且可以重复使用,在高空飞行过程中采用风筝的飞行原理使得其所需要的电能更少,增加其滞空时间,提高该太阳能无人浮空器的作业效率。
附图说明
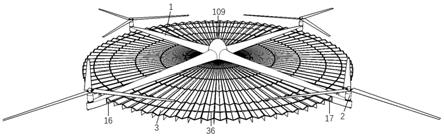
24.图1是本发明一种柔性太阳能板可折叠无人浮空器的结构示意图;
25.图2是本发明一种柔性太阳能板可折叠无人浮空器中机身的结构示意图;
26.图3是本发明一种柔性太阳能板可折叠无人浮空器中主体内部的结构示意图;
27.图4是本发明一种柔性太阳能板可折叠无人浮空器中太阳能结合板的折叠结构的结构示意图;
28.图5是本发明一种柔性太阳能板可折叠无人浮空器中柔性太阳能结合板电池板的布置图;
29.图6是本发明一种柔性太阳能板可折叠无人浮空器中旋转支架的结构示意图;
30.图7是本发明一种柔性太阳能板可折叠无人浮空器中旋转支架的传动图;
31.图8是本发明一种柔性太阳能板可折叠无人浮空器中旋转支架合并后的结构示意图;
32.图9是本发明一种柔性太阳能板可折叠无人浮空器中四个旋转支架的安装布置图;
33.图10是本发明一种柔性太阳能板可折叠无人浮空器中四个旋转支架的拆分示意图;
34.图11是本发明一种柔性太阳能板可折叠无人浮空器中旋转片和旋转扇叶的结构示意图;
35.图12是本发明一种柔性太阳能板可折叠无人浮空器中折叠结构的局部结构示意图;
36.图13是本发明一种柔性太阳能板可折叠无人浮空器中折叠件的结构示意图;
37.图14是本发明一种柔性太阳能板可折叠无人浮空器中滑轨和滑块与旋转扇叶的连接示意图;
38.图15是本发明一种柔性太阳能板可折叠无人浮空器中液压固定结构布置图;
39.图16是本发明一种柔性太阳能板可折叠无人浮空器中液压固定结构和旋转扇叶的配合示意图;
40.图17是本发明一种柔性太阳能板可折叠无人浮空器中液压固定结构的结构示意图;
41.图18是本发明一种柔性太阳能板可折叠无人浮空器中起落架的结构示意图;
42.图19是本发明一种柔性太阳能板可折叠无人浮空器中电动起落舱门的结构示意图;
43.图20是本发明一种柔性太阳能板可折叠无人浮空器中电动起落舱门和起落舱的连接结构示意图;
44.图21是本发明一种柔性太阳能板可折叠无人浮空器中旋翼的结构示意图;
45.图22是本发明一种柔性太阳能板可折叠无人浮空器中氢燃料电池的结构示意图;
46.图23是本发明一种柔性太阳能板可折叠无人浮空器的电路连接示意图。
47.图中,1.机身,2.旋翼,3.柔性太阳能结合板,4
‑
1.起落架a,4
‑
2.起落架b;
48.11.主体,12.收纳臂,13.固定臂,14.起落架舱,15.起落架舱门,16.太阳能板收纳舱,17.太阳能板固定舱,18.光电吊舱,19.电池组a,101.电池组b,102.氢燃料电池,103.储氢罐,104.进气口,105.压气机,106.第一进气管,107.第二进气管,108.加氢口,109.机载通信天线,110.飞行控制器,111.电源管理模块;
49.21.螺旋桨电机,22.桨叶,23.旋翼外壳,24.桨毂电机连接臂,25.桨帽,26.桨毂,27.桨毂桨叶连接臂,28.航行灯,29.电子调速器;
50.31.旋转支架固定轴,32.旋转支架,32
‑
1.旋转片,32
‑
2.旋转扇叶,33.旋转电机,34.电机固定轴,35.齿轮,36.滑轨,37.液压固定结构,37
‑
1.电动液压伸缩杆,37
‑
2.固定
柱,38.轴承,39.滑块,301.结合板,302.折叠臂,303.折叠件,303
‑
1.连接臂,303
‑
2.旋转板,303
‑
3.基座,303
‑
4.过渡齿轮;
51.41.电动液压杆a,42.液压杆旋转轴,43
‑
1.支撑臂a,43
‑
2.支撑臂b,43
‑
3.支撑臂旋转轴,43
‑
4.锁死装置,44.立柱,45.立柱旋转轴,46.减震弹簧,47.机轮,48.铰链,49.连接臂,401.电动液压杆b,402.电动液压杆c。
具体实施方式
52.下面结合附图和具体实施方式对本发明进行详细说明。
53.本发明一种柔性太阳能板可折叠无人浮空器,如图1
‑
5包括机身1,机身1包括相互垂直的收纳臂12和固定臂13,收纳臂12和固定臂13形成“十”字交叉状,形成的“十”字交叉处固定有椭球形的主体11,收纳臂12与固定臂13的两端的上下两侧分别设置有旋翼2和航行灯28,主体11上对应收纳臂12和固定臂13之间的位置处均设置有旋转支架32,旋转支架32上设置有柔性太阳能结合板3,旋转支架32旋转角度为90
°
,即就是收纳臂12与固定臂13之间夹角,柔性太阳能结合板3在旋转支架32上展开后呈夹角为90
°
的扇形。
54.如图6
‑
8所示,主体11对应收纳臂12与固定臂13之间的位置处安装有旋转支架固定轴31和电机固定轴34,旋转支架固定轴31上通过轴承38旋转连接旋转支架32,旋转支架32上设置有啮合齿,电机固定轴34上套设有旋转电机33,旋转电机33上连接有齿轮35,齿轮35和旋转支架32上的啮合齿啮合;
55.如图9
‑
11所示,旋转支架32包括n个环形的旋转片32
‑
1,多个旋转片32
‑
1由下到上套均设在轴承38上,多个旋转片32
‑
1在展开时,第一个旋转片32
‑
1不需要转动即第一个旋转片32
‑
1不刻啮合齿,第二个旋转片32
‑
1刻有啮合齿以实现0
°
到(90/n
‑
1)
°
,第三个旋转片32
‑
1刻有啮合齿以实现0
°
到2*(90/n
‑
1)
°
的旋转,以此类推第n个旋转片32
‑
1侧壁上刻有啮合齿以实现0
°
到90
°
的旋转,旋转片32
‑
1远离啮合齿的一侧固定有旋转扇叶32
‑
2,每个旋转片32
‑
1均与齿轮35啮合,每个旋转扇叶32
‑
2均与水平面垂直,如图12所示,旋转扇叶32
‑
2上方沿其长度方向均匀固定有多个折叠件303,折叠件303在旋转扇叶32
‑
2上呈对称分布,折叠件303的两端分别位于旋转扇叶32
‑
2的两侧,折叠件303的两端分别固定连接有折叠臂302,位于同一旋转扇叶32
‑
2同一侧的相邻两个折叠臂302共同连接有柔性太阳能结合板3,相邻两个旋转扇叶32
‑
2相靠近的一侧对应的折叠臂302通过铰链铰接;
56.如图13所示,折叠件303包括固定在旋转扇叶32
‑
2上的基座303
‑
3,基座303
‑
3设置为“凹”型的板式结构,基座303
‑
3“凹”型的两侧内部设置为半圆形,基座303
‑
3两侧的半圆形上设置有啮合齿,旋转扇叶32
‑
2上设置有基座安装孔,基座303
‑
3穿过一端基座安装孔并将“凹”型口处卡在基座安装孔内,基座303
‑
3两端的啮合齿上均啮合有旋转板303
‑
2,旋转板303
‑
2通过铰接连接有连接臂303
‑
1,折叠臂302固定在连接臂303
‑
1上,旋转板303
‑
2包括两块形状相同的筋板,两块筋板下端通过铰链48连接后铰接在基座303
‑
3上,两块筋板中间固定有过渡齿轮303
‑
4,过渡齿轮303
‑
4与基座303
‑
3上的啮合齿啮合,两块筋板远离旋转扇叶32
‑
2的一端铰接连接臂303
‑
1,连接臂303
‑
1连接筋板的一端设置有与过渡齿轮303
‑
4啮合的啮合齿;
57.旋转扇叶32
‑
2上端还固定设置有水平的且沿旋转扇叶32
‑
2长度方向设置的结合板301,结合板301的宽度与旋转扇叶32
‑
2展开后同一旋转扇叶32
‑
2两侧柔性太阳能结合板
3之间的间距相同,结合板301上铺设有柔性太阳能结合板3。
58.如图14
‑
17所示,收纳臂12位于主体11的两端的两侧均设置有太阳能板收纳舱16,固定臂13位于主体11的两端的两侧均设置有太阳能板固定舱17,太阳能板收纳舱16和太阳能板固定舱17内均设置有液压固定结构37,液压固定结构37包括在太阳能板收纳舱16和太阳能板固定舱17上下两侧壁对应设置的电动液压伸缩杆37
‑
1,位于上下两侧的电动液压伸缩杆37
‑
1的伸出端相对应设置且均固定连接有固定柱37
‑
2,旋转扇叶32
‑
2收缩至太阳能板收纳舱16或太阳能板固定舱17内时,旋转扇叶32
‑
2上对应电动液压伸缩杆37
‑
1的位置处设置有固定孔,固定柱37
‑
2伸入固定孔中。
59.每个旋转扇叶32
‑
2上下两侧还设置有滑块39,太阳能板收纳舱16和太阳能板固定舱17内对应滑块39的位置处设置有滑轨36。
60.还包括设置在机身1上的飞行控制器110和电源管理模块111,飞行控制器110和电源管理模块111通过导线电连接,多个柔性太阳能结合板3通过导线串联后通过导线连接电源管理模块111,电源管理模块111通过线缆电连接有电池组a19和电池组b101,电池组b101和飞行控制器110分别通过导线分别连接旋翼2、航行灯28、电动液压伸缩杆37
‑
1以及旋转电机33。
61.主体11上下方还分别设置有机载通信天线109和光电吊舱18,机载通信天线109和光电吊舱18通过分别通过导线连接电池组a19,电池组a19为主体11中的航电设备提供电源,主体11的上方安装有机载通信天线109,光电吊舱18为无人浮空器提供视觉信息。
62.如图18
‑
20所示,固定臂13和收纳臂12位于主体11两侧中间位置的下方均设置有起落架舱14,起落架舱14上安装有电动起落架舱门15,收纳臂12的起落架舱14内安装有起落架a4
‑
1,固定臂13的起落架舱14内安装有起落架b4
‑
2,电动起落架舱门15、起落架a4
‑
1、起落架b4
‑
2通过导线连接电池组b101和飞行控制器110。
63.起落架a4
‑
1和起落架b4
‑
2结构相同,均包括固定安装在起落架舱14内的液压杆旋转轴42、支撑臂旋转轴43
‑
3以及立柱旋转轴45,液压杆旋转轴42、支撑臂旋转轴43
‑
3、立柱旋转轴45上分别铰接有电动液压杆a41、支撑臂a43
‑
1、立柱44,电动液压杆a41的另一端铰接在立柱44上部,支撑臂a43
‑
1的另一端共同交接有支撑臂b43
‑
2和锁死装置43
‑
4,锁死装置43
‑
4的另一端铰接在电动液压杆a41与立柱44连接的铰链上,锁死装置43
‑
4通过包括通过铰链连接两个连接杆,两个连接杆的另一端分别铰接在支撑臂a43
‑
1和支撑臂b43
‑
2铰接的铰链上以及电动液压杆a41与立柱44连接的铰链上,支撑臂b43
‑
2另一端铰接在立柱44下部,立柱44另一端安装有减震弹簧46,减震弹簧46远离机身的一侧安装有机轮47,电动液压杆a41通过导线连接电池组b101和飞行控制器110;
64.起落架a4
‑
1与起落架b4
‑
2的区别在于起落架a4
‑
1为单机轮结构,起落架b4
‑
2为双机轮结构,其中起落架a4
‑
1向前后方向收纳,起落架b4
‑
2向左右方向收纳。
65.起落架舱门15包括三片门板,第一片门板与起落架舱14铰接,且第一片门板还铰接有电动液压杆b401,电动液压杆b401另一端铰接在立柱44,第二片和第三片门板之间通过铰链48连接,第二片门板的内侧两端还铰接有连接臂49,第三片门板内侧铰接有电动液压杆c402,电动液压杆c402另一端铰接在立柱44下端,电动液压杆b401、电动液压杆c402分别通过导线连接电池组b101和飞行控制器110。
66.如图21所示,旋翼2包括旋翼外壳23,旋翼外壳23与收纳臂12和固定臂13的末端相
连接,旋翼外壳23的下方设置有散热口,旋翼外壳23中安装有螺旋桨电机21,螺旋桨电机21通过桨毂电机连接臂24连接有桨毂26,桨毂26通过桨毂桨叶连接臂27连接桨叶22,桨毂26的外面安装有桨帽25,其中螺旋桨电机21通过导线连接有电子调速器29,电子调速器29通过导线连接所述电池组b101和飞行控制器110。
67.如图22所示,氢燃料电池102还通过导线连接有电源管理模块111,氢燃料电池102通过第一进气管106连接有储氢罐103,氢燃料电池102还通过第二进气管107连接有压气机105,压气机105上设置有进气口104,进气口104连接有氧气管,储氢罐103上还设置有加氢口108。
68.氢燃料电池102设置在主体11内。
69.本发明的收纳臂12与固定臂13中间均匀分布有立柱结构,该结构可以加强无人浮空器收纳臂12与固定臂13的强度,提升整体的可靠度。
70.本发明中共有n个旋转片32
‑
1,则其中第一个旋转片32
‑
1不需要转动即第一个旋转片32
‑
1不刻齿,第二个旋转片32
‑
1刻的齿可以旋转到(90/n
‑
1)
°
,第三个旋转片32
‑
1刻的齿可以旋转到2*(90/n
‑
1)
°
,以此类推第n个旋转片32
‑
1刻的齿可以到旋转90
°
,每个旋转片32
‑
1后面都连接有旋转扇叶32
‑
2,其中,可以转动90
°
的旋转扇叶32
‑
2可以通过液压固定结构37固定在收纳臂12或者固定臂13中,0
°
的旋转扇叶32
‑
2通过液压固定结构37固定在收纳臂12中,当柔性太阳能结合板3展开时旋转扇叶32
‑
2固定到固定臂13中,使柔性太阳能结合板3在展开的时候可以固定不变型,当柔性太阳能结合板3收回后固定到收纳臂12中,使柔性太阳能结合板3在起降的过程中不会滑落出来,其中旋转扇叶32
‑
2的转动带动其上安装的结合板301和折叠件303进行转动,在转动的过程中折叠件303带动其上固定安装的折叠臂302电池板39进行折叠或展开的动作,其中旋转扇叶32
‑
2和结合板301、折叠臂302、折叠件303组成的折叠结构的折叠与展开与折叠扇的原理相同,柔性太阳能结合板3安装在两个相连的折叠臂302的空隙位置,整个折叠结构的收纳与展开为全自动结构。
71.本发明的氢燃料电池102为备用电源,在柔性太阳能结合板3产生的电能与储存的电能不足时启用备用电源进行供电,其中氢燃料电池102所需的氢气由储氢罐103通过第一进气管106提供,所需要的氧气由进气口104进入压气机105加压后通过第二进气管107进入到氢燃料电池102中,其中储氢罐103中氢气不足时,通过加氢口108进行加气。
72.本发明的电子调速器29控制螺旋桨电机21的转动以及转速,光电吊舱18采集的视觉数据通过图传模块传回地面控制站。
73.本发明的控制系统中包括电源管理模块111,电源管理模块111与氢燃料电池102、太柔性阳能结合板3、电池组a19、电池组b101、飞行控制器110、视觉模块相连接,其中柔性太阳能结合板3和氢燃料电池102产生的电能通过电源管理模块111变压后储存在电池组中,电池组a19和电池组b101储存的电能通过电源管理模块111变压后为飞行控制器110、视觉模块等供电,机载通信天线109、传感器模块、动力模块、其他航电设备都通过接口与飞行控制器110连接,其中机载通信天线109与地面控制站相连接为无人浮空器提供控制指令,传感器模块可以为无人浮空器提供更加详细的飞行数据,动力模块包括电动液压杆a41、电动液压杆b401、电动液压杆c402、旋转电机33、电子调速器29,其中电子调速器29控制螺旋桨电机21的转动以及转速,其中光电吊舱18将采集的视觉数据处理后通过图传模块传回地面控制站。
74.本发明的一种柔性太阳能板可折叠无人浮空器的工作原理为:无人浮空器在飞行的过程中,空气会分成上下流层,此时通过无人浮空器下层的空气受无人浮空器面的阻塞,空气的流速减低,气压升高,无人浮空器就往上扬,上层的空气流动顺畅,流速增大,气压减低,把无人浮空器往上吸,由这种气压差而产生把无人浮空器往上推的扬力。无人浮空器在空中飞行时也会受到空气往下压的压力,此压力称之为抗力,而抗力小于扬力时,无人浮空器才能飞翔于空中。所以在飞行的过程中只要通过旋翼2改变无人浮空器的角度,就可以使无人浮空器顺利的飞行,这样可以节约相应电能,使得无人浮空器的滞空时间更久。整个飞行的过程中柔性太阳能结合板3都为展开的状态,因为这样可以增大无人浮空器的受力面积。
75.本发明的一种柔性太阳能板可折叠无人浮空器的柔性太阳能结合板工作原理为:
76.展开:电机固定轴34上安装的旋转电机33带动其上连接的齿轮35转动,齿轮35通过其上的齿带动在旋转支架固定轴31上通过轴承38配套安装的旋转片32
‑
1转动,旋转片32
‑
1带动与其连接的旋转扇叶32
‑
2转动,旋转扇叶32
‑
2带动其上固定安装的结合板301和折叠件303以及滑块39同步转动,其中折叠件303上安装的折叠臂302进行展开的动作,与此同时两个相连的折叠臂302的空隙位置安装的柔性太阳能结合板3同步展开直至刻有可以转动到90
°
齿的旋转扇叶32
‑
2转动到太阳能板固定舱17的相应位置,此时安装在太阳能板固定舱17中的液压固定结构37中的固定柱37
‑
2插入到刻有可以转动到90
°
齿的旋转扇叶32
‑
2的固定孔中,在整个过程中每个旋转扇叶32
‑
2上安装的滑块39在滑轨36中滑动。
77.收回:太阳能板固定舱中的液压固定结构37中的固定柱37
‑
2与旋转扇叶32
‑
2上的固定孔分离,与此同时电机固定轴34上的旋转电机33反转,旋转电机33带动齿轮35转动,齿轮35带动旋转支架固定轴31上配套安装的旋转片32
‑
1回转,旋转片32
‑
1带动与其连接的旋转扇叶32
‑
2回动,旋转扇叶32
‑
2带动其上固定安装的结合板301和折叠件303以及滑块39同步回转,其中折叠件303上安装的折叠臂302进行折叠的动作,与此同时两个相连的折叠臂302的空隙位置安装的柔性太阳能结合板3同步折叠直至刻有可以转动到90
°
齿的旋转扇叶32
‑
2转动到太阳能板收纳舱16的相应位置,此时安装在太阳能板收纳舱16中的液压固定结构37中的固定柱37
‑
2插入到刻有可以转动到90
°
齿的旋转扇叶32
‑
2的固定孔中进行固定。
78.本发明一种柔性太阳能板可折叠无人浮空器的作业全过程如下:
79.地面控制站的指挥人员发送起飞指令,通过机载通信天线109将该指令发送至飞行控制器110,飞行控制器110将指令处理后发送相应的作业指令到电源系统,电池组a19和电池组b101通过电源管理模块111开始供电,螺旋桨电机21在电子调速器29的控制下开始转动,旋翼2转动产生升力,无人浮空器开始升空,在离地一段距离后,电动液压杆a41、电动液压杆b401、电动液压杆c402开始工作,使得起落架4收回到起落架舱14中,同时起落架舱门15关闭,到达指定高度后,电机固定轴34上安装的旋转电机33带动其上连接的齿轮35转动,齿轮35通过其上的齿带动在旋转支架固定轴31上通过轴承38配套安装的旋转片32
‑
1转动,旋转片32
‑
1带动与其连接的旋转扇叶32
‑
2转动,旋转扇叶32
‑
2带动其上固定安装的结合板301和折叠件303以及滑块39同步转动,其中折叠件303上安装的折叠臂302进行展开的动作,与此同时两个相连的折叠臂302的空隙位置安装的柔性太阳能结合板3同步展开直至刻有可以转动到90
°
齿的旋转扇叶32
‑
2转动到太阳能板固定舱17的相应位置,此时安装在太阳能板固定舱17中的液压固定结构37中的固定柱37
‑
2插入到刻有可以转动到90
°
齿的旋
转扇叶32
‑
2的固定孔中,当柔性太阳能结合板3固定好后,柔性太阳能结合板3开始利用太阳能发电,并且将产生的电能通过电源管理模块111储存在电池组或者直接提供给用电器,与此同时旋翼2开始调整无人浮空器的姿态,使其可以利用扬力飞行,在此飞行过程中可以节约电能,在任务执行完成后,柔性太阳能结合板3开始折叠回收,首先太阳能板固定舱中的液压固定结构37中的固定柱37
‑
2与旋转扇叶32
‑
2上的固定孔分离,与此同时电机固定轴34上的旋转电机33反转,旋转电机33带动齿轮35转动,齿轮35带动旋转支架固定轴31上配套安装的旋转片32
‑
1回转,旋转片32
‑
1带动与其连接的旋转扇叶32
‑
2回动,旋转扇叶32
‑
2带动其上固定安装的结合板301和折叠件303以及滑块39同步回转,其中折叠件303上安装的折叠臂302进行折叠的动作,与此同时两个相连的折叠臂302的空隙位置安装的柔性太阳能结合板3同步折叠直至刻有可以转动到90
°
齿的旋转扇叶32
‑
2转动到太阳能板收纳舱16的相应位置,此时安装在太阳能板收纳舱16中的液压固定结构37中的固定柱37
‑
2插入到刻有可以转动到90
°
齿的旋转扇叶32
‑
2的固定孔中进行固定,此时无人浮空器逐渐降落,离地面到一定距离时,起落架4下落直至降落到地面,旋翼2停止转动,任务结束。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

