1.本公开涉及移动体、通信方法和程序,并且具体地,涉及使得能够优先发送所需数据的移动体、通信方法和程序。
背景技术:
2.常规地,自主移动的移动体与控制器或服务器之间的通信已经与数据类型无关地被一致地执行。除了诸如自主移动的无人机、车辆、船只和真空吸尘器之类的自主移动机器人之外,移动体还包括附接到移动体并移动的设备等。因此,移动体的移动包括飞行移动、在陆地上或水上(或水下)的移动、室内移动等。
3.其中,专利文献1描述了地面终端以比无人飞行器(uav)发送的图像数据高的优先级发送飞行控制数据。
4.引用列表
5.专利文献
6.专利文献1:pct公开no.2017
‑
503385的日语译文
技术实现要素:
7.本发明要解决的问题
8.例如,当移动体在移动期间发送数据时,需要设置要发送数据的优先级并根据移动是否成功来确定发送。例如,通过是否沿着预定路线执行了移动,或者通过成像的图像数据的内容来确定移动是否成功。
9.此外,为了快速确定是否有必要对已经成像的图像数据再次进行成像,有必要优先发送进行确定所需的图像数据。
10.已经鉴于这种情形做出了本公开,并且本公开旨在使得能够优先发送必要的数据。
11.问题的解决方案
12.本公开的移动体是一种无人飞行器,该无人飞行器包括:控制单元,其针对本机获取的数据设置处理优先级;以及通信单元,其基于所设置的优先级来发送数据。
13.本公开的通信方法是以下的一种通信方法:移动体针对本机获取的数据设置处理优先级,并且基于所设置的优先级来发送数据。
14.本公开的程序是一种使计算机能够执行以下处理的程序:针对移动体获取的数据设置处理优先级;以及基于所设置的优先级来发送数据。
15.在本公开中,针对移动体获取的数据设置处理优先级,并且基于所设置的优先级发送数据。
附图说明
16.图1是图示了应用根据本公开的技术的移动体的示图。
17.图2是用于图示测量/检查系统的概况的示图。
18.图3是用于图示测量/检查系统的概况的示图。
19.图4是示出了移动体的配置示例的框图。
20.图5是示出了云服务器的硬件配置示例的框图。
21.图6是示出了云服务器的功能配置示例的框图。
22.图7是图示了数据发送处理的流程的流程图。
23.图8是图示了优先级的示图。
24.图9是图示了优先级的示图。
25.图10是示出了移动体的另一配置示例的框图。
26.图11是图示了数据发送处理的流程的流程图。
27.图12是图示了发送优先级的示图。
28.图13是图示了出于各飞行目的的识别对象和分析结果的示例的示图。
29.图14是图示了云服务器的操作的流程图。
具体实施方式
30.下文中,将描述用于执行本公开的实施例(下文中被称为实施例)。注意的是,将按以下顺序给出描述。
31.1.应用根据本公开的技术的移动体
32.2.测量/检查系统的概况
33.3.移动体和云服务器的配置
34.4.数据发送处理的流程
35.5.分析捕获图像的示例
36.6.出于各飞行目的的识别对象和分析结果的示例
37.7.云服务器的操作
38.8.其它
39.<1.应用根据本公开的技术的移动体>
40.如图1中所示,应用根据本公开的技术的移动体1被配置为针对由本机获取的数据设置处理优先级并基于所设置的优先级来发送数据。在图1中,针对数据a、b和c设置处理优先级,并且数据a、b和c以所设置的优先级发送。
41.除了诸如自主移动的无人机、车辆、船只和真空吸尘器之类的自主移动机器人之外,移动体还包括附接到移动体并移动的设备等。以下,将描述将根据本公开的技术应用于在空中飞行的无人机的示例。然而,除了无人机之外,根据本公开的技术可以应用于诸如在陆地上移动的自主行驶车辆、在水上或水下移动的自主导航船只以及在室内移动的自主移动真空吸尘器之类的自主移动机器人。
42.<2.测量/检查系统的概况>
43.图2是图示了包括应用根据本公开的技术(本技术)的移动体的测量/检查系统的概况的示图。
44.在图2中示出的测量/检查系统中,无人飞行器(uav)被用于地形测量和检查构造物。
45.如图2中所示,在地面上安装航拍标识(air photo signal)10作为布置在应用本技术的移动体的移动路线上的预设位置处的目标信号的示例。除了航拍标识10之外,目标信号还包括交通标志、地理围栏标志、建筑物、人等。航拍标识10被手动安装,或者通过将其从诸如无人机之类的无人飞行器或由人控制的飞行器上散开来安装。此外,可以通过将航拍标识10安装在无人机的顶表面上来移动航拍标识10本身。
46.注意的是,尽管未示出,但当进行地形测量时,在地面上安装多个航拍标识10。
47.航拍标识10可以包括其上打印有预定图形的纸或塑料,或者可以通过堆叠具有预定形状的诸如塑料或橡胶之类的平坦材料来配置。此外,航拍标识10可以包括用于显示预定图形的诸如液晶显示器(lcd)或有机电致发光(el)显示器之类的显示面板,或者可以具有诸如反射器之类的扩展且显影的构造物。
48.使航拍标识10经历航空成像。在图2的测量/检查系统中,在被配置为无人机的移动体20上安装相机21。移动移动体20,并通过安装在移动体20上的相机21执行航拍标识10的成像(航拍标识10的航空成像)。在该示例中,移动体20的移动是飞行移动。然而,在移动体20被配置为自主行驶车辆的情况下,它是在陆地上的移动,而在移动体20被配置为自主导航船只的情况下,它是在水上或水下的移动。此外,在移动体20被配置为自主移动真空吸尘器的情况下,它是室内移动。
49.航拍标识10的航空成像方法不限于使用移动体20的方法。换句话说,可以不仅通过使用诸如移动体20之类的无人飞行器,而且通过使用例如人乘坐的并由人控制的飞行载具、人造卫星等来执行航拍标识10的航空成像。
50.通过接收从全球定位系统(gps)卫星40发送的gps信息,移动体20获取表示本机的纬度和经度的位置信息(本机位置)。
51.此外,移动体20通过无线通信或有线通信经由安装在地面上的基站41向云服务器30发送用相机21对航拍标识10进行成像而获得的捕获图像(例如,静止图像)。
52.注意的是,如图3中所示,移动体20可以经由用于控制具有发送器、个人计算机(pc)等的移动体20的控制器42将捕获图像发送到云服务器30。此外,移动体20可以直接将捕获图像发送到云服务器30。
53.云服务器30通过分析来自相机21的捕获图像来识别在捕获图像中出现的航拍标识10。此外,云服务器30使用航拍标识10的分析结果创建地面上地形的三维模型。然后,云服务器30根据所创建的三维模型测量地面上的地形,并输出测量的结果。
54.由云服务器30执行的处理可以由移动体20而非云服务器30执行,或者可以在移动体20和云服务器30之间共享。
55.顺便一提,在以上提到的测量/检查系统中,当云服务器30分析来自相机21的捕获图像时,不需要没有航拍标识10的捕获图像。
56.因此,为了使云服务器30更快地输出地形测量结果,移动体20必须在飞行期间优先将捕获图像与航拍标识10一起发送。
57.因此,在图2的测量/检查系统中,移动体20针对本机获取的捕获图像设置处理优先级,使得具有航拍标识10的捕获图像被优先发送。因此,即使在移动体20和云服务器30之间的通信频带窄的情况下,也可以以较少的延迟输出地形测量结果。
58.<3.移动体和云服务器的配置>
59.以下,将描述构成以上提到的测量/检查系统的移动体20和云服务器30的配置。
60.(移动体的配置)
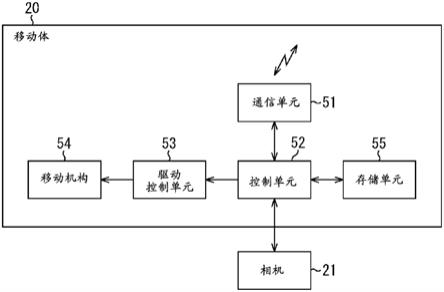
61.图4是示出了移动体20的配置示例的框图。
62.移动体20包括通信单元51、控制单元52、驱动控制单元53、移动机构54和存储单元55。
63.通信单元51包括网络接口等,并与云服务器30、用于控制移动体20(图3)的控制器42和任何其它设备执行无线或有线通信。例如,通信单元51可以直接与要通信的设备通信,或者可以经由用于wi
‑
fi(注册商标)、4g、5g等的基站或中继器执行网络通信。此外,通信单元51通过接收从gps卫星40发送的gps信息来获取本机位置。
64.控制单元52包括中央处理单元(cpu)、存储器等,并通过执行预定程序来控制通信单元51、驱动控制单元53、存储单元55和相机21。
65.驱动控制单元53包括诸如专用ic和现场可编程门阵列(fpga)之类的电路,并根据控制单元52的控制来控制移动机构54的驱动。
66.移动机构54是用于使移动体20移动的机构,并包括飞行机构、行驶机构、推进机构等。在该示例中,移动体20被配置为无人机,并且移动机构54包括作为飞行机构的电机、推进器等。此外,在移动体20被配置为自主行驶车辆的情况下,移动机构54包括作为行驶机构的车轮等。在移动体20被配置为自主导航船只的情况下,移动机构54包括作为推进机构的螺旋推进器等。移动机构54根据驱动控制单元53的控制被驱动,以移动移动体20。
67.在移动体20中,控制单元52通过根据例如由通信单元51接收的来自控制器42的信号控制驱动控制单元53来驱动移动机构54。因此,移动体20根据控制器42的操作而移动。
68.此外,控制单元52根据来自控制器42的信号控制相机21执行成像。
69.存储单元55包括诸如闪存之类的非易失性存储器,并根据控制单元52的控制存储各种类型的信息。例如,存储单元55存储(容纳)在移动路线上预设的特定位置作为关于移动路线的背景信息。该特定位置是例如安装作为目标信号的航拍标识10的安装位置。
70.控制单元52针对本机获取的数据设置处理优先级。具体地,控制单元52针对将发送到云服务器30的数据(下文中,也被称为发送数据)设置发送优先级,并设置数据分析的优先级。例如,控制单元52基于在通过相机21的成像获取了捕获图像时的本机位置以及存储在存储单元55中的背景信息(特定位置)针对包括捕获图像的发送数据设置优先级。
71.然后,通信单元51基于由控制单元52设置的优先级将发送数据发送到云服务器30。
72.(云服务器的配置)
73.图5是示出了云服务器30的硬件的配置示例的框图。
74.云服务器30具有内置的cpu 72,并且输入/输出接口80经由总线71连接到cpu 72。
75.当用户(操作者)等通过操作输入单元77而利用输入/输出接口80输入命令时,cpu 72相应地执行存储在只读存储器(rom)73中的程序。此外,cpu 72将存储在硬盘75中的程序加载到随机存取存储器(ram)74中并执行它。
76.cpu 72执行各种处理,以使云服务器30起到具有预定功能的设备的作用。例如,cpu 72使各种处理的处理结果从输出单元76输出、从通信单元78发送、或者在必要时经由输入/输出接口80记录在硬盘75上。
77.输入单元77包括键盘、鼠标、麦克风等。输出单元76包括lcd、扬声器等。
78.由cpu 72执行的程序可以被预先记录在硬盘75、rom 73和作为内置在云服务器30中的记录介质的可移除记录介质81上。
79.图6是示出了云服务器30的功能配置示例的框图。
80.如图6中所示,云服务器30包括通信单元91、控制单元92和存储单元93。
81.通信单元91对应于图5的通信单元78,并与移动体20执行无线或有线通信。例如,通信单元91接收诸如基于在移动体20中设置的优先级而发送的捕获图像之类的发送数据。
82.控制单元92对应于图5的cpu 72、rom 73、ram 74,并控制通信单元91和存储单元93。控制单元92使用通信单元91接收的数据和存储在存储单元93中的数据来执行处理。
83.存储单元93对应于例如图5的硬盘75,并存储(容纳)诸如从移动体20发送的捕获图像之类的各种数据。
84.<4.数据发送处理的流程>
85.接下来,将参考图7的流程图描述图4的移动体20进行的数据发送处理的流程。在例如移动体20开始根据控制器42的操作沿着其中安装有多个航拍标识10的移动路线(飞行路线)飞行之后,执行图7中的处理。
86.在步骤s11中,安装在飞行中的移动体20上的相机21执行地面上的成像(航空成像)。通过相机21的成像而获取的捕获图像被供应到控制单元52。
87.在步骤s12中,通信单元51通过在相机21的成像定时接收从gps卫星40发送的gps信息来获取本机位置。
88.在步骤s13中,控制单元52根据通信单元51获取的本机位置与存储在存储单元55中的航拍标识10的安装位置之间的距离来针对捕获图像设置优先级。
89.这里,将参考图8描述针对捕获图像设置的优先级。
90.如图8中所示,在获取的捕获图像是在航拍标识10附近捕获的捕获图像的情况下,即,在本机位置与航拍标识10的安装位置之间的距离短的情况下,优先级被设置为“高”。
91.另一方面,在获取的捕获图像是并非在航拍标识10附近捕获的捕获图像的其它捕获图像的情况下,即,在本机位置与航拍标识10的安装位置之间的距离长的情况下,优先级被设置为“低”。
92.如上所述,在图8的示例中,针对捕获图像设置“高”或“低”优先级。
93.返回到图7的流程图,在步骤s14中,控制单元52确定针对捕获图像设置的优先级是否为高(“高”)。
94.在步骤s14中确定优先级为“高”的情况下,在步骤s15中,控制单元52控制通信单元51将捕获图像发送到云服务器30。
95.在步骤s15中将捕获图像发送到云服务器30之后,处理返回到步骤s11,并且每隔固定的时间间隔重复类似的处理。此外,在步骤s14中确定优先级为“低”的情况下,不发送捕获图像,处理返回到步骤s11,并且每隔固定的时间间隔重复类似的处理。
96.如上所述,移动体20在沿着飞行路线飞行的同时,以例如每几分钟为周期捕获地面的航空图像,并基于针对获取的捕获图像设置的优先级来将捕获图像发送到云服务器30。
97.注意的是,优先级被设置为“低”的捕获图像可以被存储在存储单元55等中,并且
例如在飞行完成之后通过有线通信统一发送到云服务器30。
98.此外,优先级被设置为“高”的捕获图像可以被累积在控制单元52的发送缓冲器中,并且当累积了一定量的捕获图像时统一发送到云服务器30。
99.根据以上处理,可以优先发送示出航拍标识10的可能性高的捕获图像,即,优先发送必要的数据。因此,即使在移动体20和云服务器30之间的通信频带窄的情况下,也可以以较少的延迟输出地形测量结果。
100.以上,假定优先级被设置为“高”的捕获图像本身被发送到云服务器30。然而,优先级被设置为“高”的捕获图像的标识符可以被发送到云服务器30。优先级被设置为“高”的捕获图像本身被存储在存储单元55等中,并且在飞行完成之后统一发送到云服务器30。
101.捕获图像的标识符可以是任何可以指定捕获图像的信息,例如是捕获图像的文件名、单独指派的id等。
102.在这种情况下,当获取了捕获图像时,捕获图像的标识符与本机位置(gps信息)相关联,并且根据gps信息的位置与航拍标识10的安装位置之间的距离针对捕获图像的标识符设置优先级。
103.此外,通过将相机21配置为gps相机,在获取了捕获图像时的gps信息可以被存储在捕获图像中包括的可交换图像文件格式(exif)信息中。在这种情况下,可以根据gps信息的位置与航拍标识10的安装位置之间的距离来针对捕获图像设置优先级。
104.这里,参照图9,将描述针对捕获图像及其标识符设置的优先级。
105.如图9中所示,在与获取的捕获图像的标识符相关联的gps信息的位置在航拍标识10的安装位置附近的情况下,捕获图像的标识符的优先级被设置为“高”。
106.此外,在与获取的捕获图像的标识符相关联的gps信息的位置远离航拍标识10的安装位置的情况下,捕获图像的标识符的优先级被设置为“低”。
107.以这种方式,在发送捕获图像的标识符的情况下,发送到云服务器30的数据量小于发送捕获图像本身的情况。
108.另一方面,在存储在exif信息中的gps信息的位置在航拍标识10的安装位置附近的情况下,捕获图像的优先级被设置为“高”。
109.此外,在存储在exif信息中的gps信息的位置远离航拍标识10的安装位置的情况下,捕获图像的优先级被设置为“低”。
110.以这种方式,在发送捕获图像本身的情况下,发送到云服务器30的数据量大于发送捕获图像的标识符的情况。
111.在图9的示例中,在根据优先级发送具有小数据量的标识符和具有大数据量的捕获图像二者的情况下,即使优先级相同,也能优先发送具有小数据量的数据。
112.如上所述,可以根据与捕获图像的标识符相关联的gps信息或捕获图像中包括的gps信息的位置与航拍标识10的安装位置之间的距离来针对捕获图像的标识符和捕获图像本身设置优先级。
113.<5.分析捕获图像的示例>
114.以下,将给出以下示例:移动体20分析通过相机21的成像而获取的捕获图像,并确定在捕获图像中是否出现航拍标识10,使得更可靠地发送具有航拍标识10的捕获图像。
115.(无人机的配置)
116.图10是示出了移动体20的另一配置示例的框图。
117.图10的移动体20基本上以与图4的移动体20类似的方式配置,但与图4的移动体20的不同之处在于,分类器120被存储(保持)在存储单元55中。
118.控制单元52使用保持在存储单元55中的分类器120来分析通过相机21的成像而获取的捕获图像。此外,控制单元52针对捕获图像和捕获图像的分析结果设置优先级。
119.构成分类器120的算法以及该算法中的诸如阈值和重复次数之类的参数是针对诸如地形测量和构造物检查之类的各飞行目的以及移动体20的各飞行环境预设的。
120.通信单元51基于所设置的优先级来将捕获图像或分析结果中的至少一个发送到云服务器30。
121.(数据发送处理)
122.接下来,将参考图11的流程图描述图10的移动体20进行的数据发送处理的流程。
123.注意的是,由于图11的流程图中的步骤s31和s32的处理与图7的流程图中的步骤s11和s12的处理类似,因此将省略对其的描述。
124.在步骤s33中,控制单元52根据通信单元51获取的本机位置与存储在存储单元55中的航拍标识10的安装位置之间的距离来针对捕获图像设置分析优先级。
125.分析优先级是对捕获图像进行分析的优先级,并且优先分析针对其设置了高优先级的捕获图像。换句话说,优先分析示出航拍标识10的可能性高的捕获图像。
126.在步骤s34中,控制单元52基于针对捕获图像设置的优先级来分析捕获图像。具体地,控制单元52使用保持在存储单元55中的分类器120来识别与捕获图像中的特定位置(航拍标识10的安装位置)对应的被摄体(即,航拍标识10)。
127.这里,作为捕获图像的分析结果(识别结果),例如,可以获得有无被摄体(航拍标识10)、被摄体(航拍标识10)的位置信息(坐标位置)、经分析的捕获图像的标识符、识别对象是被摄体(航拍标识10)的准确度等。
128.当捕获图像的分析完成时,处理前进至步骤s35,并且控制单元52针对捕获图像和分析结果设置发送优先级。
129.发送优先级是向云服务器30发送的优先级,并且针对其设置了高优先级的捕获图像或分析结果被优先发送到云服务器30。
130.这里,将参考图12描述针对捕获图像和分析结果设置的发送优先级。在该示例中,当数据量较小时,优先级被设置成较高。
131.换句话说,具有小数据量(经分析的捕获图像的标识符、航拍标识10的位置信息等)的分析结果的优先级被设置为“高”。
132.注意的是,可以针对有无航拍标识10、航拍标识10的位置信息、经分析的捕获图像的标识符以及作为捕获图像的分析结果而获得的识别对象的准确度中的每一个独立地设置优先级。
133.另一方面,在其本身具有大于分析结果的数据量的捕获图像当中,针对具有航拍标识10的捕获图像的优先级被设置为“中”,而不具有航拍标识10的捕获图像的优先级被设置为“低”。
134.这里,通过从具有航拍标识10的捕获图像中切出包括航拍标识10的区域,数据量可以被保持为中等水平。在这种情况下,针对通过切出包括航拍标识10的区域而获得的图
像的优先级被设置为例如“中”。
135.如上所述,在图12的示例中,针对捕获图像设置“高”、“中”和“低”优先级中的一个。
136.返回到图11的流程图,在步骤s36中,控制单元52确定针对捕获图像和分析结果设置的优先级是否为高(“高”)。
137.在步骤s36中确定优先级为“高”的情况下,在步骤s37中,控制单元52控制通信单元51将捕获图像或分析结果发送到云服务器30。
138.在步骤s37中将捕获图像或分析结果发送到云服务器30之后,处理返回到步骤s31,并且每隔固定的时间间隔重复类似的处理。此外,在步骤s36中确定优先级为“中”或“低”的情况下,不发送捕获图像,处理返回到步骤s31,并且每隔固定的时间间隔重复类似的处理。
139.如上所述,移动体20在沿着飞行路线飞行的同时,以例如每几分钟为周期捕获地面的航空图像,并基于针对获取的捕获图像和分析结果设置的优先级来将捕获图像或分析结果发送到云服务器30。
140.注意的是,优先级被设置为“中”或“低”的捕获图像被存储在存储单元55等中,并且例如在飞行完成之后通过有线通信统一发送到云服务器30。
141.此外,优先级被设置为“高”的分析结果可以被累积在控制单元52的发送缓冲器中,并且当累积了一定量的分析结果时统一发送到云服务器30。
142.根据以上处理,可以优先发送示出航拍标识10的可能性高的捕获图像的分析结果,即,优先发送必要的数据。因此,即使在移动体20和云服务器30之间的通信频带窄的情况下,也可以以较少的延迟输出地形测量结果。
143.<6.出于各飞行目的的识别对象和分析结果的示例>
144.以上,移动体20的飞行目的是地形测量,但其也可以检查构造物。构造物检查包括例如检测诸如安装在地面上的建筑物之类的建筑物的外壁上的裂缝和瓷砖剥落以及检测太阳能电池板的损坏。
145.图13是图示了出于各飞行目的的识别对象和分析捕获图像的分析结果的示例的示图。
146.在飞行目的是地形测量的情况下,如图13的上部中所示,分析捕获图像时的识别对象(被摄体)是如上所述的航拍标识10。此外,分析结果是航拍标识10等的位置信息。
147.在飞行目的是检测建筑物外壁上的裂缝或瓷砖剥落的情况下,如图13的中间部分中所示,分析捕获图像时的识别对象是外壁上的裂缝或瓷砖剥落。此外,分析结果是指示外壁上的裂缝部分或瓷砖剥落部分的检测信息。
148.在飞行目的是检测太阳能电池板的损坏的情况下,如图13的下部部分中所示,分析捕获图像时的识别对象是太阳能电池板的损坏。此外,分析结果是指示太阳能电池板的损坏部分的检测信息。
149.以这种方式,在移动体20的飞行目的是检查构造物的情况下,可以优先发送示出用作识别对象的构造物的检查对象部分的可能性高的捕获图像的分析结果,即,优先发送必要的数据。因此,即使在移动体20和云服务器30之间的通信频带窄的情况下,也可以以较少的延迟输出构造物的检查结果。
150.在图10的配置中,移动体20分析捕获图像并将分析结果发送到云服务器30,但云服务器30可以分析从移动体20发送的捕获图像。
151.<7.云服务器的操作>
152.这里,将参考图14的流程图描述云服务器30分析捕获图像的情况下的云服务器30的操作。在这种情况下,假定分类器120被保持在云服务器30的存储单元93中。
153.在步骤s51中,通信单元91从移动体20接收捕获图像。该捕获图像是例如示出航拍标识10的可能性高的捕获图像。
154.在步骤s52中,控制单元92分析来自移动体20的捕获图像。具体地,控制单元92通过使用保持在存储单元93中的分类器120来识别捕获图像中的航拍标识10。
155.在步骤s53中,控制单元92将来自移动体20的捕获图像及其分析结果存储在存储单元93中。
156.使用存储在存储单元93中的分析结果来创建地面上地形的三维模型。云服务器30根据所创建的三维模型测量地面上的地形,并经由通信单元91输出测量的结果。
157.<8.其它>
158.(变形例)
159.在针对捕获图像及其分析结果设置优先级的配置中,在发送捕获图像期间针对分析结果设置比正在发送的捕获图像的优先级高的优先级的情况下,通信单元51可以中断并发送分析结果。因此,可以更可靠地优先发送必要的数据。
160.此外,在通信频带窄等时在发送缓冲器中累积的未发送数据的量超过预定量的情况下(例如,在发送缓冲器溢出的情况下),通信单元51不能发送未发送数据。
161.此外,以上,假定设置“高”和“低”两种模式或“高”、“中”和“低”三种模式作为优先级。不限于此,可以对具有相同优先级的数据(捕获图像和分析结果)赋予更详细的优先级。
162.具体地,对于针对其设置了相同优先级的多个数据,例如,对具有小数据量的捕获图像赋予高优先级,或者对识别对象的准确度高的分析结果赋予高优先级。
163.在这种情况下,通信单元51不能发送优先级比预定顺序低的数据。
164.上述的一系列处理可以由硬件或软件执行。在由软件执行该一系列处理的情况下,从网络或程序记录介质安装构成软件的程序。
165.注意的是,根据本公开的技术的实施例不限于上述实施例,并且可以在不脱离根据本公开的技术的范围的情况下进行各种修改。
166.此外,本说明书中描述的效果仅仅是示例而非限制,并且可以存在其它效果。
167.此外,根据本公开的技术可以具有以下配置。
168.(1)一种移动体,包括:
169.控制单元,其针对本机获取的数据设置处理优先级;以及
170.通信单元,其基于所设置的优先级来发送数据。
171.(2)根据(1)所述的移动体,其中,
172.所述控制单元基于在获取数据时的本机位置以及关于移动路线的背景信息来针对数据设置优先级。
173.(3)根据(2)所述的移动体,其中,
174.关于移动路线的背景信息包括在移动路线上预设的特定位置。
175.(4)根据(3)所述的移动体,还包括:
176.在移动期间执行成像的相机,其中,
177.要发送的数据包括通过用相机成像而获取的捕获图像。
178.(5)根据(4)所述的移动体,其中,
179.控制单元根据在获取捕获图像时的本机位置与特定位置之间的距离来针对捕获图像设置优先级,并且
180.通信单元基于所设置的优先级来发送捕获图像。
181.(6)根据(4)所述的移动体,其中,
182.控制单元根据由与捕获图像的标识符相关联的位置信息所指示的位置与特定位置之间的距离来针对该标识符设置优先级,并且
183.通信单元基于所设置的优先级来发送该标识符。
184.(7)根据(4)所述的移动体,其中,
185.控制单元根据与捕获图像中包括的位置信息所指示的位置与特定位置之间的距离来针对该捕获图像设置优先级,并且
186.通信单元基于所设置的优先级来发送该捕获图像。
187.(8)根据(4)所述的移动体,其中,
188.所述控制单元
189.基于针对捕获图像设置的第一优先级来分析该捕获图像,并且
190.针对该捕获图像和该捕获图像的分析结果设置第二优先级,并且
191.通信单元基于所设置的第二优先级来发送该捕获图像或该分析结果中的至少一个。
192.(9)根据(8)所述的移动体,其中,控制单元识别捕获图像中的与特定位置对应的被摄体。
193.(10)根据(9)所述的移动体,其中,分析结果包括有无被摄体。
194.(11)根据(9)或(10)所述的移动体,其中,分析结果包括被摄体的位置信息。
195.(12)根据(9)至(11)中任一项所述的移动体,其中,分析结果包括经分析的捕获图像的标识符。
196.(13)根据(9)至(12)中任一项所述的移动体,其中,分析结果包括识别对象是被摄体的准确度。
197.(14)根据(9)至(13)中任一项所述的移动体,其中,被摄体是用于地形测量的航拍标识。
198.(15)根据(9)至(13)中任一项所述的移动体,其中,被摄体是构造物的检查对象部分。
199.(16)根据(4)至(15)中任一项所述的移动体,其中,
200.相机每隔固定的时间间隔执行成像,并且
201.控制单元针对每隔固定的时间间隔获取的数据设置优先级。
202.(17)根据(1)至(16)中任一项所述的移动体,其中,
203.在发送第一数据期间,当针对第二数据设置比第一数据的优先级高的优先级的情况下,通信单元以中断方式发送第二数据。
204.(18)根据(1)至(17)中任一项所述的移动体,其中,
205.在累积在发送缓冲器中的未发送数据的量超过预定量的情况下,通信单元不发送未发送数据。
206.(19)一种通信方法,其中,
207.移动体
208.针对本机获取的数据设置处理优先级,并且
209.基于所设置的优先级来发送数据。
210.(20)一种使计算机执行以下处理的程序:
211.针对移动体获取的数据设置处理优先级,并且
212.基于所设置的优先级来发送数据。
213.参考符号列表
214.1 移动体
215.10 航拍标识
216.20 移动体
217.21 相机
218.30 云服务器
219.51 通信单元
220.52 控制单元
221.53 驱动控制单元
222.54 移动机构
223.55 存储单元
224.91 通信单元
225.92 控制单元
226.93 存储单元
227.120 分类器
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

