1.本发明涉及海洋工程技术领域,特别涉及一种帆船用转向装置。
背景技术:
2.帆船具有悠久的历史,依靠自然的风力进行动力驱动,无人帆船技术是基于有人帆船技术的历史延续,与现在科技技术的融合,来装备现阶段的无人帆船,无人帆船上有很多结构,其中就有无人帆船用转向装置;
3.现有的无人帆船用转向装置在使用时存在一定的弊端,现有的无人帆船用转向装置采用单舵和船帆配合的方式,在航行过程且风力较小的情况下转向比较困难,转向比较慢,不满足人们的要求,为此,我们提出一种全海况长航程无人帆船用转向装置。
技术实现要素:
4.本发明的目的是:为有效解决背景技术中的问题,提供一种全海况长航程无人帆船用转向装置。
5.本发明的技术方案是:一种全海况长航程无人帆船用转向装置,包括:
6.设置在无人帆船尾端的双舵装置,所述双舵装置包括安装架体、两组舵组件以及控制舵组件运行的控制器,所述安装架体固定安装在无人帆船的尾端,所述舵组件安装在安装架体上,所述控制器固定安装在无人帆船尾部的船舱上,所述控制器与舵组件连接。
7.辅助转向装置,所述辅助转向装置包括设置在无人帆船底板上的水流辅助装置和安装在无人帆船甲板上的若干组可调节的折叠式船帆。
8.优选的,两组所述舵组件对称安装在安装架体上,且两组所述舵组件设置在安装架体靠近前端位置和其靠近后端位置。
9.优选的,所述舵组件包括执行器和舵器,两组所述执行器对称安装在安装架体的上端外表面前端位置和其上端外表面后端位置,所述执行器通过传动组件与舵器连接。
10.优选的,所述水流辅助装置包括两组水流辅助件,两组所述水流辅助件对称安装在无人帆船底板的前端和其底板的后端。
11.优选的,所述水流辅助件包括进水组件、输送管道和水流引导件,所述进水组件通过输送管道与水流引导件连接,所述进水组件设置在无人帆船的外表面远离舵组件位置,所述输送管道和水流引导件均设置在无人帆船底板的内部。
12.优选的,所述进水组件上开设有两组进水通道,所述水流引导件包括前引导件和后引导件,所述输送管道包括两组送水管,两组所述进水通道通过两组送水管分别与前引导件和后引导件连通。
13.优选的,所述前引导件和后引导件均包括主管道和若干组分流管道,若干组所述分流管道的一端等间距安装在主管道的外表面,所述分流管道与主管道连通。
14.优选的,所述无人帆船底板的外表面开设有若干组固定口,所述分流管道的另一端与固定口固定连接,所述进水组件安装在无人帆船外表面远离舵组件位置。
15.优选的,所述主管道的内部设置有引流区和水流加速区,所述水流加速区包括若干组依次连接的文丘里管道的进料斗,所述进料斗的内部设置有电磁阀。
16.优选的,所述引流区采用引流管,所述引流管与文丘里管道连接,所述引流管的内表面靠近分流管道位置固定安装有若干组倾斜板,所述倾斜板上设置有加强板。
17.有益效果:1、通过设置在无人帆船尾端的双舵装置,双舵装置设置在无人帆船上尾部的安装架体上,而且双舵装置位于安装架体的前端和后端,能够进一步提升无人帆船的控制性能,而且该双舵装置的结构简洁、易于维护,使用效果较好;
18.2、通过设置的辅助转向装置,转向时辅助转向装置启动,水流通过进水组件进水,水流经过水流加速区加速,然后从分流管道中排出,转向时,两组水流辅助件中不同引导件上主管道中的电磁阀打开,通过水流冲击产生的反作用力驱动无人帆船快速的转向,从而能够提高无人帆船的转向速度,无人帆船转向效果更好;
19.3、通过设置的辅助转向装置,遇到风浪时无人帆船倾斜时启动倾斜面的水流辅助件启动,水流产生的冲击力能够帮助无人帆船快速回正,从而能够提高无人帆船航行时的稳定性,功能更加的齐全,提高全海况长航程无人帆船用转向装置的使用效果,而且整个全海况长航程无人帆船用转向装置的结构简单,成本较低,使用效果好,能够大规模生产应用,较为实用。
附图说明
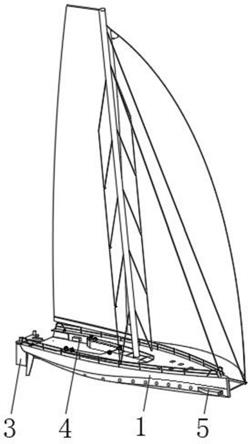
20.图1为本发明的整体结构示意图;
21.图2为本发明的侧视局部结构图;
22.图3为本发明中辅助转向装置的局部结构图;
23.图4为本发明中水流引导件的局部结构图;
24.图5为本发明实施例2中折叠式船帆的结构示意图。
25.图中:1
‑
无人帆船;2
‑
安装架体;3
‑
舵组件;4
‑
控制器;5
‑
进水组件;6
‑
前引导件;7
‑
后引导件;8
‑
送水管;9
‑
分流管道;10
‑
电磁阀;11
‑
倾斜板;21
‑
底座;22
‑
容纳室;23
‑
帆布;24
‑
横梁杆;25
‑
定滑轮;26
‑
固定杆;27
‑
升降块;28
‑
牵引绳;29
‑
立架;31
‑
绕线轮;32
‑
电机。
具体实施方式
26.实施例1,参见附图1
‑
4,一种全海况长航程无人帆船用转向装置,包括:
27.设置在无人帆船1尾端的双舵装置,双舵装置包括安装架体2、两组舵组件3以及控制舵组件3运行的控制器4,安装架体2固定安装在无人帆船1的尾端,舵组件3安装在安装架体2上,控制器4固定安装在无人帆船1尾部的船舱上,控制器4与舵组件3连接。
28.辅助转向装置,辅助转向装置包括设置在无人帆船1底板上的水流辅助装置和安装在无人帆船1甲板上的若干组可调节的折叠式船帆。
29.转向时控制器4控制双舵装置启动,驱动无人帆船1进行,同时调整无人帆船1上的折叠式船帆的角度,改变无人帆船1的角度。
30.如图1
‑
2所示,两组舵组件3对称安装在安装架体2上,且两组舵组件3设置在安装架体2靠近前端位置和其靠近后端位置。
31.两组舵组件3之间的距离为无人帆船1尾部距离的0.7
‑
1.3倍。
32.如图1
‑
2所示,舵组件3包括执行器和舵器,两组执行器对称安装在安装架体2的上端外表面前端位置和其上端外表面后端位置,执行器通过传动组件与舵器连接。
33.使用时控制器4控制执行器运动,执行器驱动舵器运行,从而能够改变无人帆船1的方向。
34.如图1
‑
4所示,水流辅助装置包括两组水流辅助件,两组水流辅助件对称安装在无人帆船1底板的前端和其底板的后端。
35.如图3
‑
4所示,水流辅助件包括进水组件5、输送管道和水流引导件,进水组件5通过输送管道与水流引导件连接,进水组件5设置在无人帆船1的外表面远离舵组件3位置,输送管道和水流引导件均设置在无人帆船1底板的内部。
36.如图3
‑
4所示,进水组件5上开设有两组进水通道,水流引导件包括前引导件6和后引导件7,输送管道包括两组送水管8,两组进水通道通过两组送水管8分别与前引导件6和后引导件7连通。
37.帆船转向时,启动两组水流辅助件上不同引导件上的电磁阀10,水穿过进水组件5上的进水通道和输送管道流入到水流引导件中,转向时,无人帆船1一侧的后引导件7和另一侧的前引导件6喷水,利用反作用力实现无人帆船1的快速转向。
38.如图3
‑
4所示,前引导件6和后引导件7均包括主管道和若干组分流管道9,若干组分流管道9的一端等间距安装在主管道的外表面,分流管道9与主管道连通。
39.如图1
‑
3所示,无人帆船1底板的外表面开设有若干组固定口,分流管道9的另一端与固定口固定连接,进水组件5安装在无人帆船1外表面远离舵组件3位置。
40.进水组件5进水,通过进水通道进入主管道,然后通过主管道流入到分流管道9中,通过固定口喷出。
41.如图4所示,主管道的内部设置有引流区和水流加速区,水流加速区包括若干组依次连接的文丘里管道的进料斗,进料斗的内部设置有电磁阀10。
42.通过电磁阀10的开启和关闭实现水流辅助件的开启和关闭。
43.如图4所示,引流区采用引流管,引流管与文丘里管道连接,引流管的内表面靠近分流管道9位置固定安装有若干组倾斜板11,倾斜板11上设置有加强板。
44.文丘里管道的设置能够加快水的流动速度,从而增加水的冲击力,从而增加转向时的作用力与反作用力,更快的实现无人帆船1的转向。
45.需要说明的是,本发明为一种全海况长航程无人帆船用转向装置,使用时,无人帆船1的折叠式船帆角度改变,控制器4控制双舵装置启动,执行器驱动舵器运行,同时,无人帆船1上位于不同侧的前引导件6和后引导件7上的电磁阀10打开,水流穿过不同侧的前引导件6和后引导件7,进行无人帆船1的转向。
46.通过设置在无人帆船1尾端的双舵装置,双舵装置设置在无人帆船1上尾部的安装架体2上,而且双舵装置位于安装架体2的前端和后端,能够进一步提升无人帆船1的控制性能,而且该双舵装置的结构简洁、易于维护,使用效果较好。
47.通过设置的辅助转向装置,转向时辅助转向装置启动,水流通过进水组件5进水,水流经过水流加速区加速,然后从分流管道9中排出,转向时,两组水流辅助件中不同引导件上主管道中的电磁阀10打开,通过水流冲击产生的反作用力驱动无人帆船1快速的转向,从而能够提高无人帆船1的转向速度,无人帆船1转向效果更好。
48.通过设置的辅助转向装置,遇到风浪时无人帆船1倾斜时启动倾斜面的水流辅助件启动,水流产生的冲击力能够帮助无人帆船1快速回正,从而能够提高无人帆船1航行时的稳定性,功能更加的齐全,提高转向装置的使用效果,而且整个全海况长航程无人帆船用转向装置的结构简单,成本较低,使用效果好,能够大规模生产应用,较为实用。
49.实施例2,在实施例1的基础上,对无人帆船1的可调节的折叠式船帆做进一步限定。
50.参见附图5,折叠式船帆的具体结构,包括底座21,底座21的一端上方安装有立架29,立架29采用空心结构,立架29内部安装有多个升降块27,每个升降块27的一端均安装横梁杆24,横梁杆24上安装有帆布23。
51.升降块27与立架29之间采用滑动连接,相邻的两个升降块27之间相互连接,立架29内还安装有用于控制升降块27上升的提升机构。
52.提升机构包括牵引绳28、定滑轮25、绕线轮31以及电机32,其中:
53.绕线轮31和电机32均设置有底座21内,绕线轮31安装在电机32的输出轴上,定滑轮25通过固定杆26转动安装在立架29内部的顶部,牵引绳28的一端固定在绕线轮31上,牵引绳28的另一端由下至上依次穿过各个升降块27、绕过定滑轮25并固定在最顶部的升降块27上。
54.底座21的上方还设置有容纳室22,容纳室22可以在升降块27降下后容纳所有的升降块27、横梁杆24以及帆布23。
55.通过采用上述技术方案:
56.该无人帆船的船帆在使用时,只需要控制电机32的运行即可实现帆布23的升起和降下,当电机32在正转时,绕线轮31同步进行顺时针转动,拉动牵引绳28在绕线轮31上进行缠绕,此时,牵引绳28在定滑轮25的作用下拉动升降块27上升,从而使横梁杆24上升,实现帆布23的展开,反之,当电机32反转时,牵引绳28放松,所有的升降块27在自身的重力作用下下滑,直至全部收入容纳室22内,帆布23以及横梁杆24收入容纳室22内,实现了帆布23的折叠,这样的结构设置使得该无人帆船的船帆展开、折叠操控方便。
57.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

