1.本技术涉及机器人领域,尤其是基于ipmc材料的仿生扇贝机器人。
背景技术:
2.海洋作为地球重要组成部分,其蕴含着巨大的资源,而海洋的开发吸引着人们的注意,而如何去探知海洋资源是目前研究热点。目前越来越多的人着手研发水下机器人来代替人工去水下探索未知的海底世界,开发海洋资源。仿生机器人即为一个重要类型。研发人员通过研究水下生物的运动规律以及特性,模拟仿照这些生物外形以及特点,研发出相应的仿生机器人,令仿生机器人也可以像水下生物一样在水下环境正常工作。而自然界中的生物种类繁多,往往会给研发人员不一样的灵感与启发。目前主要研发出来的水下机器人多是仿生鱼机器人、类虾形机器人等等,但上述仿生机器人均需特殊的较重的驱动部件和壳体,以控制其运动,且水下推力不强,这不利于机器人的水下运动,且受电源耗尽影响较大。而扇贝,它是贝壳中少数不多的会迁移和运动的物种,在移动时的速度较快,且结构小巧,它通过自身的闭壳肌快速张开以及闭合外壳,将吸入的水从后方用力挤出去,以此给自己前进的动力,如果能改进其贝壳结构,以控制其运动,可解决上述问题。
3.离子聚合物
‑
金属复合材料(ionic polymer metal composite, ipmc)是一种较为典型的离子型eap,这种材料能将电能转化为化学能,最后再转化为机械能。ipmc的驱动机理主要是该材料进入水环境后,其基底膜内的阳离子与水离子结合形成水合阳离子,在施加小于或等于12v的直流电源后,产生一个电场力,水合阳离子在该电场力的作用下会与溶剂分子通过微小管道向阴极方向移动,导致两边的分子数产生差异,这种不平衡的分布会使其产生宏观上的变形, ipmc会向阳极发生弯曲形变。如果将扇贝壳体采用ipmc材料制成,其可有效减轻壳体,噪音小,且无需过多的驱动装置等,即可使机器人长时间实现水下探测。
技术实现要素:
4.本技术所要解决的技术问题是改善现有水下机器人需要较重的驱动和壳体,不能长时间水下探测等缺点,提供基于ipmc材料制成贝壳壳体的仿生扇贝机器人;该仿生扇贝机器人可较轻地仿照扇贝外形以及扇贝的运动特点,在水下环境长时间推进运动。
5.本技术提供的技术方案是:
6.一种仿生扇贝机器人,其特征在于:包括贝壳、连接叶、放置板和控制器;所述贝壳包括上贝壳和下贝壳,所述上贝壳和所述下贝壳均由ipmc材料制成;所述连接叶连接所述上贝壳尾部和所述下贝壳尾部,所述连接叶由刚性材料制成;所述放置板置于所述上贝壳或所述下贝壳上,所述放置板内设有电池;所述控制器置于所述放置板上,且所述控制器连接所述上贝壳和所述下贝壳并控制上贝壳和所述下贝壳的张开或闭合;所述下贝壳的尾部的左右两侧成弧形结构,所述上贝壳的尾部为直线状,形成一个左侧射流孔与右侧射流孔,用于扇贝机器人闭合时排出贝壳里的水,推进贝壳运动。
7.进一步地,所述上贝壳的尾部和所述下贝壳尾部均设有一个连接叶,两个所述连接叶同轴心,两个所述连接叶之间采用销连接。
8.进一步地,所述刚性材料可选用铜、不锈钢或钛合金材料。
9.进一步地,所述放置板固定在所述下贝壳上。
10.进一步地,所述控制器包括稳压装置、信号放大装置和单片机。
11.进一步地,在非工作状态,上下两片贝壳为闭合状态。
12.仿生扇贝机器人的工作过程为:打开电源开始工作时,直流电源供电,单片机产生激励信号,经过稳压装置与信号放大装置,被放大后的信号作用于由impc材料制成的上贝壳与下贝壳,上贝壳向上弯曲,下贝壳向下弯曲,仿生扇贝机器人的上下两片贝壳被打开,扇贝张开。接收到反向信号后,上贝壳与下贝壳快速恢复原状,上下两片贝壳紧闭;闭合的瞬间,滞留在贝壳内的水被压缩、经尾部的左侧射流孔与右侧射流孔射出,射出的两股水流会对整个仿生扇贝机器人产生一个反向推力,推动机器人向前方移动。通过改变输出电压与频率,可以控制上下两片贝壳张开的程度与速度,从而改变仿生扇贝机器人在水下的运动速度与运动方向。
13.本装置的工作原理是:在低压电场的作用下,ipmc材料内部的可移动阴离子及溶剂通过微管发生迁移使得内部分布不均衡从而产生弯曲变形。当装置开始运行时,低压直流电源开始供电,稳压装置使得输出电压在一个固定的范围内,单片机产生一种激励信号,通过信号放大装置产生更大功率的信号传递给ipmc材料。由ipmc材料制成的贝壳在接收到信号后,产生相应形变,贝壳先闭合后张开,每次闭合后,将贝壳内的水从后方的两个射流孔排出,排出的水给扇贝一个反作用力,推动扇贝前进。控制单片机产生信号的幅值大小与间隔时间,改变扇贝的开闭幅度以及开闭速度,从而控制仿生扇贝机器人的运动方向与运动速度。
14.本技术所达到的有益效果:本技术采用ipmc材料制成贝壳,其性能不受水压等水环境的影响,能直接适应水下工作;且其具有较大的变形能力,能模拟水下生物较大幅度的运动或者摆动,且质轻,无需过重传统驱动装置和壳体。同时,以扇贝为仿生对象,整个机构结构小巧、精简,水下推进能力强,能探索海底绝大部分地方,且噪音小,更接近真实生物,避免对环境影响,提高仿生真度。控制器配置有单片机、稳压装置以及信号放大装置,可以调节产生的频率以及电压,并稳定输出,保证装置的正常工作。装置所需要的是低压电源,耗费的能源较少,在水下的使用寿命较长。
附图说明
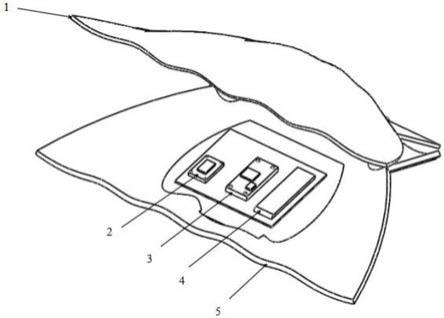
15.图1为本技术实施例的立体结构示意图。
16.图2为本技术实例后置结构示意图。
17.图3为本技术软体仿生扇贝机器人闭合运动状态图。
18.图4为本技术软体仿生扇贝机器人张开运动状态图。
19.其中:1
‑
上贝壳;2
‑
稳压装置;3
‑
信号放大装置;4
‑
单片机;5
‑ꢀ
下贝壳;6
‑
左侧射流孔;7
‑
连接叶;8
‑
右侧射流孔。
具体实施方式
20.下面结合附图对本技术作进一步描述。以下实施例仅用于更加清楚地说明本技术的技术方案,而不能以此来限制本技术的保护范围。
21.如图1
‑
4所示,一种仿生扇贝机器人,包括由ipmc材料制成的上贝壳1和下贝壳5,两片贝壳之间用连接叶7连接,连接叶7采用刚性材料,如铜、不锈钢或钛合金材料,一般不变形,增加运动时的稳定性。非工作状态时,上贝壳1保持闭合状态。在下贝壳5上固定一块安装有电池的放置板,电池固定在放置板后面,图中省略,,电池板上固定控制器,控制器包括从左往右依次是稳压装置2、信号放大装置3以及单片机4,基于材料特性,选择低于12v的直流电压,优选为5v,,同时单片机stm32输出1hz方波信号,单片机4可调节信号的频率和幅值,稳压装置2和信号放大装置3分别推荐使用 ltc3780和l298n。并通过导线将上贝壳1、下贝壳5与控制器相连接。
22.如图2所示,本技术的上贝壳1尾部和下贝壳5尾部分别有一个连接叶7,两个连接叶7同轴心,两个连接叶7之间采用销连接,保证上贝壳1与下贝壳5之间转动的灵活性。下贝壳5的尾部的左右两侧设计成弧形结构,上贝壳1的尾部为直线状,形成一个左侧射流孔 6与右侧射流孔8,用于扇贝机器人闭合时排出贝壳里的水,推进贝壳运动。
23.如图4所示,打开电源开始工作时,直流电源供电,单片机4产生5v电压、1hz的方波信号,输出电压与频率可根据当前的运动模式调整,经过稳压装置2与信号放大装置3,被放大后的信号作用于由impc材料制成的上贝壳1与下贝壳5,上贝壳1向上弯曲,下贝壳5向下弯曲,仿生扇贝机器人的上下两片贝壳被打开,扇贝张开。扇贝接收到反向信号后,如图3所示,上贝壳1与下贝壳5快速朝反向弯曲变形,实现恢复原状,上下两片贝壳前端紧闭,防止前端有水漏出,闭合的瞬间,滞留在贝壳内的水在短时间内被压缩、经尾部的左侧射流孔6与右侧射流孔8射出,射出的两股水流在水中就会对整个仿生扇贝机器人产生一个反向推力,推动机器人向前方移动。通过改变输出电压与频率,可以控制上下两片贝壳张开的程度与速度,从而改变仿生扇贝机器人在水下的运动速度与运动方向。
24.本技术所达到的有益效果:本技术采用ipmc材料制成贝壳,其性能不受水压等水环境的影响,能直接适应水下工作;且其具有较大的变形能力,能模拟水下生物较大幅度的运动或者摆动,且质轻,无需过重传统驱动装置和壳体且噪音小,更接近真实生物,避免对环境影响,提高仿生真度。同时,以扇贝为仿生对象,整个机构结构小巧、精简,水下推进能力强,能探索海底绝大部分地方。控制器配置有单片机、稳压装置以及信号放大装置,可以调节产生的频率以及电压,并稳定输出,保证装置的正常工作。装置所需要的是低压电源,耗费的能源较少,在水下的使用寿命较长。
25.以上所述仅是本技术的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本技术的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

