1.本发明属于自动摆舵技术领域,具体涉及到一种无人艇自动摆舵控制装置。
背景技术:
2.随着社会的发展和科技的进步,无人操控类的设备越来越普遍,如无人飞机、无人驾驶汽车、无人艇等,无人艇是海上作业的机器人,通常用于水域监测、水样采集和水域管理等方面,而无人艇在水面上工作过程中,需要通过控制器对其调整方向,以此实现无人艇的往复巡航需求,为满足需求并实现无人艇的摆舵功能,本发明提出一种无人艇自动摆舵控制装置。
技术实现要素:
3.针对上述问题,本发明的主要目的在于设计一种无人艇自动摆舵控制装置,通过往复机构带动螺旋桨改变位置,以此调整无人艇的方向,解决无人艇自动摆舵的技术问题。
4.为了实现上述目的本发明采用如下技术方案:一种无人艇自动摆舵控制装置,包括无人艇主体和设置在无人艇主体尾部的螺旋桨。
5.所述的无人艇主体尾部的设置第一电机,螺旋桨连接在第一电机的转动轴上,所述螺旋桨通过第一电机进行驱动,所述的无人艇主体内设置往复机构,往复机构上铰接设置连接杆,所述连接杆的另一端铰接设置固定杆,所述的固定杆的另一端延伸至无人艇主体的尾部,且固定杆的端部设置腔体,第一电机设置在腔体内,第一电机通过固定杆连接在无人艇主体内部。
6.作为本发明进一步的描述,所述的往复机构包括转盘和第二电机,转盘的中心连接在第二电机的转动轴上,第二电机固定在无人艇主体的底部。
7.作为本发明进一步的描述,所述的转盘上在偏离圆心的位置设置通孔,所述的连接杆一端设置转轴,转轴插入通孔,转轴的两侧设置限位板进行限位。
8.作为本发明进一步的描述,所述的连接杆的另一端设置套环,所述的固定杆端部设置限位板,套环套在连接杆上,且通过固定杆端部的限位板进行限位。
9.作为本发明进一步的描述,所述的固定杆设置为弯折的形状,无人艇主体的尾部开设滑槽,固定杆穿过滑槽,固定杆横向的一端设置于无人艇主体的内部,且固定在无人艇主体的内部,固定杆竖直的一端设置于无人艇主体的外部,且固定杆的端部垂直向下。
10.作为本发明进一步的描述,所述的腔体设置在无人艇主体外部固定杆的端部,且腔体的中心平行于固定杆的中心,所述第一电机设置在腔体外部,且第一电机的转动轴伸出腔体,第一电机的转动轴伸出方向为远离无人艇主体的方向。
11.作为本发明进一步的描述,所述的连接杆铰接在固定杆位于无人艇主体内部的一端上。
12.作为本发明进一步的描述,所述的无人艇主体内部设置电源模块,所述第一电机
和第二电机均连接在电源模块上。
13.相对于现有技术,本发明的技术效果为:本发明提供了一种无人艇自动摆舵控制装置,在无人艇主体的内部设置往复机构,往复机构上连接螺旋桨,螺旋桨通过往复机构的运动进而改变位置,通过螺旋桨位置的改变进行调整无人艇主体行进过程中的方向,为无人艇主体自动摆舵带来了便利。
附图说明
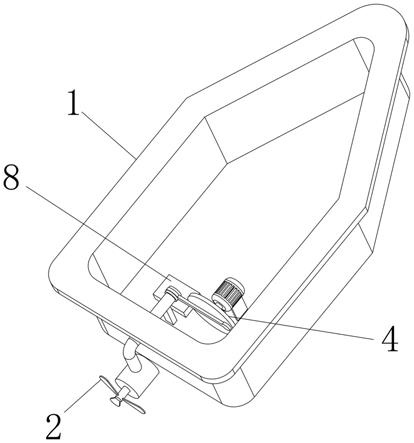
14.图1为本发明的整体结构视图;图2为本发明的往复机构配合螺旋桨结构视图;图3为本发明的螺旋桨连接第一电机结构视图;图4为本发明的连接杆结构视图。
15.图中,1.无人艇主体,2.螺旋桨,3.第一电机,4.往复机构,41.转盘,42.第二电机,5.连接杆,51.转轴,52.套环,6.固定杆,61.腔体,7.限位板,8.电源模块。
具体实施方式
16.下面结合附图对本发明进行详细描述:一种无人艇自动摆舵控制装置,参考图1
‑
4所示,包括无人艇主体1和设置在无人艇主体1尾部的螺旋桨2。
17.所述的无人艇主体1的尾部设置第一电机3,螺旋桨2连接在第一电机3的转动轴上,所述螺旋桨2通过第一电机3进行驱动,所述的无人艇主体1内设置往复机构4,往复机构4上铰接设置连接杆5,所述连接杆5的另一端铰接设置固定杆6,所述的固定杆6的另一端延伸至无人艇主体1的尾部,且固定杆6的端部设置腔体61,第一电机3设置在腔体61内,第一电机3通过固定杆6连接在无人艇主体1内部。
18.本发明通过上述公开的技术特征,可以得知,无人艇主体1通过螺旋桨2的设置进行改变行进轨迹,而螺旋桨2通过往复机构4进行带动,在往复机构4的作用下,改变螺旋桨2的位置,进而改变无人艇主体1在行进中的方向。
19.如图2所示,所述的往复机构4包括转盘41和第二电机42,转盘41的中心连接在第二电机42的转动轴上,第二电机42固定在无人艇主体1的底部,所述的转盘41上在偏离圆心的位置设置通孔,所述的连接杆5一端设置转轴51,转轴51插入通孔,转轴51的两侧设置限位板7进行限位,所述的连接杆5的另一端设置套环52,所述的固定杆6端部设置限位板7,套环52套在连接杆5上,且通过固定杆6端部的限位板7进行限位。
20.上述公开了往复机构4所包含的技术特征,及往复机构4与连接杆5的配合,另外,还需要说明的是,往复机构4包含上述实现往复效果的特征,但不仅限于上述公开的实现往复的特征,还包括任何通过机械结构的形式,加载在无人艇主体1内而实现往复效果,带动螺旋桨2改变位置的技术特征。
21.所述的固定杆6设置为弯折的形状,无人艇主体1的尾部开设滑槽,固定杆6穿过滑槽,固定杆6横向的一端设置于无人艇主体1的内部,且固定在无人艇主体1的内部,固定杆6竖直的一端设置于无人艇主体1的外部,且固定杆6的端部垂直向下。
22.上述公开了固定杆6的设置形状,通过弯折形状的固定杆6,便于螺旋桨2的位置低
于无人艇主体1的滑槽,避免因螺旋桨2的位置过高,而导致的无人艇主体1内部进水,提高无人艇主体1的安全性能。
23.所述的腔体61设置在无人艇主体1外部固定杆6的端部,且腔体61的中心平行于固定杆6的中心,所述第一电机3设置在腔体61内部,且第一电机3的转动轴伸出腔体61,第一电机3的转动轴伸出方向为远离无人艇主体1的方向,所述螺旋桨2连接在第一电机3伸出腔体61的转动轴上。
24.所述的连接杆5铰接在固定杆6位于无人艇主体1内部的一端上,即连接杆5上设置的套环52套在固定杆6位于无人艇主体1内部的一端。
25.通过上述公开的技术特征,可以得知,螺旋桨2与往复机构4的具体配合方式,通过固定杆6与连接杆5的中间过渡与转接,进而实现往复机构4带动螺旋桨2改变位置的技术效果。
26.所述的无人艇主体1内部设置电源模块8,所述第一电机3和第二电机42均连接在电源模块8上,通过电源模块8给予第一电机3和第二电机42进行供电,保持第一电机3和第二电机42的正常工作状态。
27.本发明提供了一种无人艇自动摆舵控制装置,在无人艇主体的内部设置往复机构4,往复机构4上连接螺旋桨2,螺旋桨2通过往复机构4的运动进而改变位置,通过螺旋桨2位置的改变进行调整无人艇主体1行进过程中的方向,为无人艇主体1自动摆舵带来了便利。
28.本发明的工作原理:此无人艇自动摆舵控制装置在操作过程中,通过第一电机3带动螺旋桨2转动,通过第二电机42带动转盘41,转盘41带动连接杆5,连接杆5与固定杆6铰接,进而带动固定杆6改变位置,固定杆6下部带动螺旋桨2改变位置。
29.以上实施例仅用以说明本发明的技术方案而非限制,本领域普通技术人员对本发明的技术方案所做的其他修改或者等同替换,只要不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

