1.本发明涉及水下无人平台的支持母船技术领域,尤其是涉及一种用于水下无人平台的支持保障系统。
背景技术:
2.海洋中蕴藏着丰富的矿产与生物资源,人类正在尝试对海洋领域做进一步探索与开发。水下无人平台作为探测海洋的重要装备,将在海洋资源开发、水文调查、海洋生物研究等领域发挥重要作用。
3.水下无人平台通常自带电池作为能源,受电池容量限制,续航能力不足和巡航范围受限是限制水下无人平台广泛应用的瓶颈之一。
4.同时水下无人平台通常也自带存储单元,受限于存储容量以及电池容量限制,存储的数据有限。
5.再者,水下无人平台通常也自带高精度基准时钟作为平台工作的时间基准。但是高精度基准时钟存在时间误差累积的特点,水下无人平台长时间工作,时间误差会原来越多。
技术实现要素:
6.(一)要解决的技术问题基于此,本发明提出一种用于水下无人平台的支持保障系统,通过为水下无人平台提供能源补给和进行数据交换,实现水下无人平台长时间连续可靠的作业。
7.(二)技术方案本发明为克服上述问题或者至少部分地解决上述问题,提供一种用于水下无人平台的支持保障系统,其包括:船载补给模块、线缆收放模块和水下拖曳补给模块,所述线缆收放模块用于收放水下拖曳补给模块,所述船载补给模块通过线缆收放模块与水下拖曳补给模块相连,所述船载补给模块包括供电输出单元和信号处理单元,所述水下拖曳补给模块包括:水下对接单元、水下无线充电单元、水声通信单元和水下无线数据通信单元,所述水声通信单元用于广播水下拖曳补给模块的具体位置,所述水下对接单元用于将水下无人平台固定在水下拖曳补给模块的周围,所述信号处理单元通过水下无线数据通信单元与水下无人平台进行数据交换,所述供电输出单元通过水下无线充电单元为水下无人平台提供电源。
8.优选的,所述线缆收放模块包括布放单元和铠装光电复合缆,所述布放单元通过铠装光电复合缆与水下拖曳补给模块相连;所述铠装光电复合缆用于输送电源和传输光信号。
9.优选的,所述供电输出单元包括:整流滤波器、ac转dc电路和直流输出滤波器,所述整流滤波器与ac转dc电路相连,所述ac转dc电路与直流输出滤波器相连。
10.优选的,所述信号处理单元包括:信号处理器、存储器、北斗时钟接收卡和网卡,所
述北斗时钟接收卡用于接收北斗标准时钟信号,所述网卡设有以太网光接口,所述信号处理器用于处理北斗标准时钟信号然后通过以太网光接口发送给水下无人平台,所述存储器用于存储水下无人平台发送的数据。
11.优选的,所述水下对接单元包括:机械手、水下摄像头和机械手控制器,所述水下摄像头用于侦测水下无人平台的位置信息,然后将位置信息发送给机械手控制器;所述机械手控制器用于控制机械手将水下无人平台固定在水下拖曳补给模块的周围。
12.优选的,水下摄像头还用于对水下无人平台进行拍照,然后将图片发送给信号处理单元。
13.优选的,所述水下无线充电单元包括:整流滤波器、高频逆变器和发送线圈,所述整流滤波器与高频逆变器连接,所述高频逆变器和发送线圈相连。
14.优选的,所述水下无线数据通信单元包括:cpu、存储器、以太网控制器、蓝绿激光通信控制器和蓝绿激光发射接收器,所述cpu通过以太网控制器接收信号处理单元发送的信号数据,所述蓝绿激光通信控制器用于将接收到的信号数据转变为光信号,所述蓝绿激光发射接收器将光信号发送给水下无人平台,或者接收水下无人平台发送的光信号;所述cpu通过以太网控制器接收水下无人平台发送的其自身工作状态信息。
15.本发明还提供了一种用于水下无人平台的支持保障方法,包括如下步骤:
16.搭载有支持保障系统的母船移动至预定水域后,开启水声通信机,向周围水域内的水下无人平台广播其具体位置;
17.母船附近的水下无人平台根据预先任务约定响应母船,游弋至约定位置并向母船发送补给请求;
18.母船通过线缆收放模块中的布放单元将水下拖曳补给模块放入水中约定位置,同时开启水声通信机搜索水下无人平台的位置;
19.根据预先设定,水下无人平台向水下拖曳补给模块靠拢,直至在水下无线充电单元作用范围之内;
20.水下拖曳补给模块上的水下对接单元靠近水下无人平台并将其固定在水下拖曳补给模块的周围;
21.水下拖曳补给模块的水下无线充电单元为水下无人平台提供无线充电,同时水下拖曳补给模块的水下无线数据通信单元与水下无人平台进行数据交换;
22.水下无人平台完成数据交换和充电补给后,水下拖曳补给模块上的水下对接单元开始释放水下无人平台,完成对该水下无人平台的补给;
23.通过上述步骤完成母船附近水域内的其它水下无人平台的补给,然后通过布放单元回收水下拖曳补给模块。
24.优选的,所述水下拖曳补给模块的水下无线数据通信单元与水下无人平台进行数据交换步骤中:水下无线数据通信单元将北斗精准时间通过ntp或ptp协议发送至水下无人平台,以便同步水下无人平台基准时间。
25.优选的,所述水下拖曳补给模块的水下无线数据通信单元与水下无人平台进行数据交换步骤中:水下无线数据通信单元将任务指令发送至水下无人平台,以便更新水下无人平台的任务。
26.优选的,所述船载补给模块的信号处理单元通过水下无线数据通信单元发出指
令,对水下无人平台进行状态监测和故障诊断,监测并获取其工作状态信息;例如对异常状态进行报警处理,必要时打捞回收,进行预防性维修,以保证设备可用性;水下对接单元中的水下摄像头还用于近距离对水下无人平台进行水下图像采集,并通过水下无线数据通信单元,回传至所述船载补给模块的信号处理单元。通过利用上述获取的信息对无人平台外观及工作状态情况进行收集和评估,从而为修复性维修提供有效信息和依据。
27.(三)有益效果本发明的用于水下无人平台的支持保障系统有如下的优点:
28.本发明通过水声通信单元和水下对接单元寻找和固定住水下无人平台,通过水下无线充电单元给水下无人平台无线充电,补充水下无人平台的能源,通过水下无线数据通信单元与水下无人平台的无接触数据交换,该数据交换内容包括:收集水下无人平台采集到的数据、完成水下无人平台基准时间同步以及更新水下无人平台的任务,同时对水下无人平台进行状态监测和故障诊断,监测并获取其工作状态信息,为修复性维修提供信息和依据。从而使水下无人平台能大范围、长时间连续可靠性作业,使水下无人平台在海洋探测、海洋工程、科学考察、水下无人作战网络等诸多领域发挥出更大的价值。
附图说明
29.通过参考附图会更加清楚的理解本发明的特征和优点,附图是示意性的而不应理解为对本发明进行任何限制,在附图中:
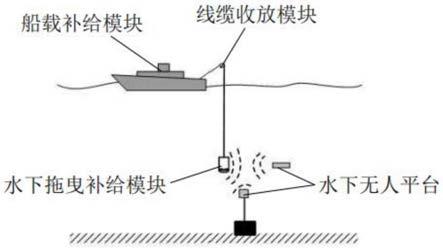
30.图1为本发明的结构示意图;
31.图2为本发明的结构框图;
32.图3为本发明水下无线充电单元给水下无人平台充电的结构示意图;
33.图4为本发明水下无线数据通信单元与水下无人平台进行数据交换的结构示意图。
具体实施方式
34.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
35.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通,也可以是“传动连接”,即通过带传动、齿轮传动或链轮传动等各种合适的方式进行动力连接。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
36.参照附图1
‑
2,本实施例提供了一种搭载在水上执勤母船上用于水下无人平台的支持保障系统,包括:船载补给模块、线缆收放模块和水下拖曳补给模块,线缆收放模块用于收放水下拖曳补给模块,船载补给模块通过线缆收放模块与水下拖曳补给模块相连,船载补给模块包括供电输出单元和信号处理单元,水下拖曳补给模块包括:水下对接单元、水
下无线充电单元、水声通信单元和水下无线数据通信单元,水声通信单元用于广播水下拖曳补给模块的具体位置,以便在与水下无人平台接近时提供距离等信息;具体的,水声通信单元可采用水声通信机广播水下拖曳补给模块的具体位置;水下对接单元用于将水下无人平台固定在水下拖曳补给模块的周围,信号处理单元通过水下无线数据通信单元与水下无人平台进行数据交换,供电输出单元通过水下无线充电单元为水下无人平台提供电源。
37.线缆收放模块包括布放单元和铠装光电复合缆,布放单元通过铠装光电复合缆与水下拖曳补给模块相连;同时铠装光电复合缆还用于输送电源和传输光信号。
38.布放单元可采用绞车或吊车收放水下拖曳补给模块。
39.供电输出单元包括:整流滤波器、ac转dc电路和直流输出滤波器,整流滤波器与ac转dc电路相连,ac转dc电路与直流输出滤波器相连。平台ac220v电源经整流滤波器后,经ac转dc电路转换成直流电源,再经过直流输出滤波器输出稳定的直流电源,然后直流电源通过铠装光电复合缆输送到水下拖曳补给模块。供电输出单元还包括用于电源监控和管理的单片机。
40.信号处理单元包括:信号处理器、存储器、北斗时钟接收卡和网卡,北斗时钟接收卡用于接收北斗标准时钟信号然后发送给信号处理器,网卡设有千兆以太网光接口,利于提高据交换效率,信号处理器用于处理北斗标准时钟信号然后通过以太网光接口发送给水下无人平台,从而使水下无人平台的高精度基准时钟完成同步,存储器用于存储水下无人平台发送的数据。水下对接单元包括:机械手、水下摄像头和机械手控制器,水下摄像头用于侦测水下无人平台的位置信息,然后将该位置信息发送给机械手控制器;机械手控制器通过操作机械手将水下无人平台固定在水下拖曳补给模块的周围,保证水下无人平台位于水下无线充电单元和水下无线数据通信单元的有效工作范围内。
41.水下无线充电单元采用磁耦合装置实现无接触无线充电。参照附图3,水下无线充电单元包括:整流滤波器、高频逆变器和发送线圈,整流滤波器与高频逆变器连接,高频逆变器和发送线圈相连。整流滤波器和高频逆变器将供电输出单元输出的直流电源转换成高频电源,然后经发送线圈发送出去。
42.水下无线数据通信单元采用短距离蓝绿光通讯装置实现无接触通信,参照附图4,水下无线数据通信单元包括:cpu、存储器、以太网控制器、蓝绿激光通信控制器和蓝绿激光发射接收器,cpu通过以太网控制器接收信号处理单元发送的信号数据,蓝绿激光通信控制器用于将接收到的信号数据转变为光信号然后发送给蓝绿激光发射接收器,蓝绿激光发射接收器将接收到的光信号发送给水下无人平台,或者接收水下无人平台发送的光信号,完成数据交换。信号处理单元发送的信号数据包括时间授时数据和任务指令数据。本实施例中的水下无线数据通信单元也可采用短距离无线电通讯装置实现无接触通信。
43.同时,船载补给模块的信号处理单元通过水下无线数据通信单元发出指令,对水下无人平台进行状态监测和故障诊断,监测并获取其工作状态信息;水下对接单元中的水下摄像头还用于近距离对水下无人平台进行水下图像采集,并通过水下无线数据通信单元,回传至信号处理单元。通过利用上述获取的信息对无人平台外观及工作状态情况进行收集和评估,从而为修复性维修提供有效信息和依据。
44.上述涉及到的水下无人平台,包括锚系式水下无人平台、座底式水下无人平台及自主动力水下无人平台等。水下无人平台包括执行探索任务所需的水声通信机、进行能量
补充所需的无线充电接收单元、进行数据交换所需的水下无线数据通信单元和进行故障诊断和状态收集单元,其设置有机内设计bit测试手段,通过问答等方式,对其进行自检,及时上报故障点、故障模式等信息,为现场级、中继级维修提供数据支撑和依据,减少后续维修时间和经济成本。
45.本实施例还提供了一种用于水下无人平台的支持保障方法,包括如下步骤:
46.s1:搭载有支持保障系统的母船到达预定水域后,开启水声通信机,向周围水域(如10海里内)内水下无人平台广播其具体位置,当附近水下无人平台根据预先任务约定响应母船,游弋至约定位置并向母船发送补给请求;
47.s2:母船收到附近水下无人平台进行能量补充和数据交换的请求后,使用线缆收放模块中的布放单元将水下拖曳补给模块放入水中约定位置,同时开启水声通信机搜索水下无人平台的位置;
48.s3:根据预先设定,水下无人平台向水下拖曳补给模块靠拢,直至在水下无线充电单元作用范围之内;
49.s4:水下拖曳补给模块上的水下对接单元启动,靠近并紧固住水下无人平台,使水下无人平台与水下拖曳补给模块处于一个相对位置上,该相对位置能保证水下无线充电单元和水下无线数据通信单元正常工作;
50.s5:水下拖曳补给模块的水下无线充电单元为水下无人平台提供无线充电,同时水下拖曳补给模块的水下无线数据通信单元与水下无人平台进行数据交换;该数据交换包括:水下无人平台将其采集的数据通过无线传输至水下拖曳补给模块的水下无线数据通信单元上,水下无线数据通信单元通过铠装光电复合缆将数据发送至船载补给模块中的信号处理单元中进行存储;水下无线数据通信单元将北斗精准时间通过ntp或ptp协议发送至水下无人平台,实现水下无人平台基准时间的同步;信号处理单元通过水下无线数据通信单元发出指令,对水下无人平台进行状态监测和故障诊断,监测并获取其工作状态信息;水下对接单元中的水下摄像头还用于近距离对水下无人平台进行水下图像采集,并通过水下无线数据通信单元,回传至船载补给模块的信号处理单元。通过实现对无人平台外观及工作状态信息的收集和评估,从而为修复性维修提供有效信息和依据;水下无线数据通信单元将任务指令发送至水下无人平台,实现水下无人平台任务更新;
51.s6:水下无人平台完成数据交换和充电补给后,水下拖曳补给模块上的水下对接单元开始释放水下无人平台,完成对该水下无人平台的补给,而水下无人平台根据预先设置的任务需求或更新的任务需求开始下一周期任务;
52.s7:通过上述步骤完成母船附近水域内的其它水下无人平台的补给,然后通过布放单元回收水下拖曳补给模块。
53.本发明提供一种用于水下无人平台能源补给和数据交换的系统构架,通过水声通信单元和水下对接单元寻找和固定住水下无人平台,通过水下无线充电单元给水下无人平台无线充电,补充水下无人平台的能源;通过水下无线数据通信单元与水下无人平台的无接触数据交换,该数据交换内容包括:收集水下无人平台采集到的收据、完成水下无人平台基准时间同步、获取水下无人平台的自身工作状态信息以及更新水下无人平台的任务,从而使水下无人平台能大范围、长时间连续可靠的作业,使水下无人平台在海洋探测、海洋工程、科学考察、水下无人作战网络等诸多领域发挥出更大的价值。
54.最后,本申请的方法仅为较佳的实施方案,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
55.虽然结合附图描述了本发明的实施方式,但是本领域技术人员可以在不脱离本发明的精神和范围的情况下做出各种修改和变型,这样的修改和变型均落入由所附权利要求所限定的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

