1.本发明涉及新型海洋无人航行器技术领域,具体涉及一种海空两栖无人航行器及布放回收方法。
背景技术:
2.海空两栖航行器是一种新型的跨介质运载平台,是一种可同时进行空中、水面、水下探测等任务的高机动性运载平台,可以通过船载、岸基等形式进行布放与回收,能够进行远程遥控航行与自动航行,具备指定空域定位、定点航行、指定水域降落、自主水面航行和飞行返航的功能,在海空立体观测、海洋环境调查、执行持久的情报收集和战场监视领域具备广泛的应用前景。
3.但是,纵观现有的观海洋无人航行器,不难发现其有着如下缺点:1.在单一介质中运动时稳定性较好,但是在两个介质之间进行切换时其切换过程极不稳定,稳定性较差,难以满足在多种不同的工作环境中稳定工作的需求;2.现有的航行器往往通过采用化石燃料或者电池进行供能,化石燃料补充时需要航行器返航,而仅用电池供能其续航能力较差,无法满足长时间、上距离、跨领域执行探测任务的需要。3.在复杂的海洋环境中,无人航行器面临着诸多危险,如搁浅、遭到敌人水面无人系统围捕等,而现有的海上航行器缺少主动避险的手段。
技术实现要素:
4.为解决现有技术中存在的问题,本发明提供了一种续航能力强、航行模式多、生存能力和稳定性强的海空两栖无人航行器及布放回收方法。
5.为实现上述目的,本发明的技术方案为:一种海空两栖无人航行器,包括舱体组件和设置在舱体组件上的翼组件和桨组件,舱体组件包括主舱体和一对对称设置在主舱体两侧的副舱体,主舱体为水平设置的圆柱状结构,主舱体靠近艇艏段为弧形结构,主舱体下方活动连接有自稳系统,主舱体内设有与自稳系统连接的控制模块,控制模块连接有执行模块、导航通信模块、传感器模块、能源供给模块和浮力调节模块,主舱体上方活动连接风能利用模块,主舱体上还设有收纳风能利用模块和自稳系统的凹槽,两个凹槽位于同一竖直面内。
6.进一步地,风能利用模块包括竖直设置的桅杆,桅杆通过联动装置与主舱体在竖直面内转动连接;桅杆一侧还设有可折叠的风帆,风帆包括与桅杆转动连接的主帆板,主帆板一侧通过带传动装置转动连接有阻力板,主帆板、阻力板均与桅杆同向设置。
7.进一步地,带传动装置包括一对在水平方向平行设置的连接板,两个连接板两端通过一对竖直设置的传动轴转动连接有两个支架,两个传动轴与连接板垂直设置,两个支架分别固定在主帆板和阻力板上,两个传动轴通过带传动连接;桅杆上套设有驱动带传动装置的过渡带轮,过渡带轮包括圆筒形的套筒,套筒两端均设有带轮,其中一个带轮连接有调节电机,另一个带轮与带传动装置连接。
8.进一步地,联动装置包括中空的机壳,机壳通过翻转机构与主舱体在竖直面内转动连接,机壳内还设有控制桅杆绕其轴线旋转的旋转机构。
9.进一步地,翻转机构包括沿主舱体宽度方向固定在机壳上的翻转轴,翻转轴连接有翻转电机,翻转电机固定在主舱体上的凹糟内;旋转机构包括与桅杆配合的旋转轴,旋转轴与桅杆同轴设置,旋转轴连接有旋转电机,旋转电机和调节电机均固定在机壳内。
10.进一步地,浮力调节模块包括气体压载装置和液体压载装置,气体压载装置设有一套,液体压载装置设有两套,两套液体压载装置对称设置在主舱体内腔两侧;气体压载装置包括靠近艇艏设置在主舱体内的储气罐和气泵,还包括设置在副舱体中的气囊,储气罐和气囊通过橡胶软管连接;液体压载装置包括设置在主舱体内的压载泵和设置在副舱体中的蓄水罐,蓄水罐和压载泵通过软管连接,压载泵的进水管和出水管均穿过主舱体底部与外界连通。
11.进一步地,自稳系统包括与主舱体在竖直面内转动连接的稳向板,稳向板远离主舱体的一端设有可调节的水滴状的配重;主舱体内设有控制稳向板旋转的电机,稳向板与电机配合的一端的环形面上设有外齿,电机与控制模块连接,主舱体底部还设有收纳稳向板的凹槽。
12.进一步地,翼组件包括一对倾斜设置的连接翼,任一连接翼的两端均贯穿主舱体与两个副舱体固定连接,翼组件还包括设置在副舱体两侧的一对风翼。
13.进一步地,桨组件包括两对控制航行器垂直升降的辅助螺旋桨,两对辅助螺旋桨对称设置在副舱体上;桨组件还包括推进航行器前进的航空螺旋桨,航空螺旋桨设在主舱体靠近艇艉的一端。
14.进一步地,能源供给模块包括设置在主舱体内的蓄电池组,还包括设置在主舱体上的太阳能板,太阳能板与蓄电池组连接;传感器模块至少包括ka波段雷达、海事雷达、多普勒海流传感器和风速传感器,风速传感器设置在桅杆远离主舱体的一端;执行模块包括设置在主舱体底部的一对舵面,两个舵面呈八字形布置。
15.一种海空两栖无人航行器布放回收方法,采用了上述的海空两栖无人航行器,包括布放和回收两个步骤,航行器布放的步骤为:s101、控制模块通过桨组件控制航行器飞行至指定海域,并垂直降落至指定海域的海面上;s102、通过浮力调节模块调节航行器吃水深度,使航行器稳定漂浮在海面上;s103、展开风能利用模块和自稳系统;s104、风能利用模块展开并自调节迎风角度,提供一种装置前进的动力;自稳系统时刻调整装置的稳定性;s105、当风力不足以驱动航行器航行时,桨组件为装置前进提供动力,完成无人航行器的布放;航行器回收的步骤为:s201、控制模块控制风能利用模块和自稳系统收纳至主舱体上部和下部的两个凹槽中;s202、控制模块控制桨组件旋转,控制航行器先垂直升至指定高度,然后横向移动至回收点上方;
s203、到达回收点上方,控制模块通过桨组件控制航行器垂直降落,完成无人航行器的回收。
16.进一步地,风能利用模块展开或收纳的过程为:通过联动装置控制桅杆在竖直面内旋转,同时,桅杆上的主帆板和阻力板随桅杆旋转,完成风能利用模块的位置变换;主帆板与阻力板之间通过带传动装置转动连接,通过联动装置内的调节电机调整阻力板与主帆板之间的角度,完成阻力板与主帆板的展开或折叠;同时,通过联动装置内的旋转电机驱动桅杆绕其轴线自旋转,从而调整主帆板和阻力板迎风角度,完成风能利用模块的角度变换;从而完成风能利用模块的完全展开或收纳。
17.与现有技术相比,本发明的有益效果为:(1)本发明的海空两栖无人航行器可实现两种航行模式,包括水面航行模式和水上飞行模式,水面航向模式主要通过浮力调节模块调节航行器的吃水深度、航空螺旋桨的推进提供其中一种前进的动力、执行模块控制前进方向以及自稳系统来保证装置运动过程中的稳定性;水上飞行模式则主要通过两对辅助螺旋桨提供航行器上升的动力,并通过辅助螺旋桨的差速旋转推进装置前进;两种航行状态之间可进行自由切换,相对于传统的单一航行模式的航行器,本发明提升了航行器对于未知区域的探索能力,为进步的海洋资源勘探和开发提供了可能。
18.(2)本发明在航行器上设置了风能利用模块,风能利用模块可以利用海洋环境中的风能作为一种驱动航行器前进的动力,并且可利用太阳能对蓄电池进行充电,从而极大地提高了海空两栖无人航行器的续航能力;风能利用模块主要适用于水面航向模式,在水面航行模式向水上飞行模式转换时风能利用模块可快速收纳进主舱体上的凹槽中,可快速完成风能利用模块的收纳和展开。
19.(3)本发明通过为海空两栖无人航行器设计的垂直飞行装置,当海空两栖无人航行器遇到未知危险时,仍然可以借助于飞行模式进行脱险或者持续航行,极大地提高了航行器的生存能力和面对复杂海况的适应能力。
20.(4)相比于传统无人海上航行器回收困难的技术难点,本发明通过利用飞行装置使航行器垂直飞起,按照控制人员的控制指令使其精准降落在回收地点,极大地降低了海上无人航行器的布放回收工作的难度。
附图说明
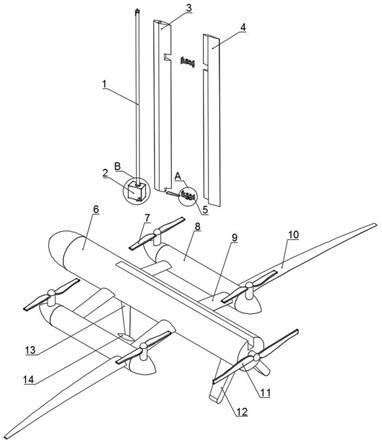
21.图1为本发明的局部爆炸图;图2为风能利用模块展开时本发明的三维结构示意图;图3为风能利用模块收起时本发明其中一个角度的三维结构示意图;图4为风能利用模块收起时本发明另一个角度的三维结构示意图;图5为图1中a处的放大图;图6为图1中b处的放大图;图7为图6联动装置的半剖视图;图8为主舱体的内部结构示意图;图9为水面航行模式的动作流程图;图10为水上飞行模式的动作流程图。
22.图中:桅杆1,联动装置2,旋转轴201,过渡带轮202,调节电机203,机壳204,旋转电机205,翻转轴206;主帆板3,阻力板4,带传动装置5,支架501,连接板502,传动轴503,主舱体6,辅助螺旋桨7,副舱体8,连接翼9,风翼10,航空螺旋桨11,舵面12,稳向板13,配重14。
23.实施例1参见图1
‑
图8,一种海空两栖无人航行器,包括舱体组件,舱体组件包括主舱体6和一对对称设置在主舱体6两侧的副舱体8,主舱体6为水平设置的圆柱状结构,主舱体6靠近艇艏段为弧形结构,主舱体6内设有控制模块,控制模块连接有执行模块、传感器模块、导航通信模块、能源供给模块和浮力调节模块;执行模块为设置在主舱体6靠近艇艉端的一对舵面12,两个舵面12呈八字形对称设置在主舱体6底部,执行模块接受来自控制模块的控制指令,完成对于航行的航行状态控制和航行模式切换;传感器模块包括ka波段雷达,海事雷达,多普勒海流传感器,风速传感器和相关扩展传感器等,传感器模块与控制模块相连接,将检测到的周围的环境信息传递给控制模块,控制模块根据当前环境信息和导航通信模块传递的控制信号发出控制指令;导航通信模块包括设置在主舱体6内的gps定位装置和通信装置,导航通信模块与控制模块相连接,用于接收远程控制人员的控制指令并将控制指令传输给控制模块,同时回传当前航行器的航行状态;能源供给模块包括设置在主舱体6内的蓄电池组,还包括设置在主舱体6上的太阳能板,太阳能板还可以设置在副舱体8上,太阳能板与蓄电池组连接,蓄电池组与执行模块、传感器模块、导航通信模块、和浮力调节模块连接并为装置提供能源;浮力调节模块包括气体压载装置和液体压载装置,气体压载装置设有一套,液体压载装置设有两套,两套液体压载装置对称设置在主舱体6内腔两侧;气体压载装置包括靠近艇艏设置在主舱体6内的储气罐和气泵,还包括设置在副舱体8中的气囊,储气罐和气囊通过橡胶软管连接;液体压载装置包括设置在主舱体6内的压载泵和设置在副舱体8中的蓄水罐,液体压载装置靠近艇艉设置,两个压载泵对称设置在主舱体6内腔两侧,蓄水罐和压载泵通过软管连接,压载泵的进水管和出水管均穿过主舱体6底部与外界连通;副舱体8中,气囊位于副舱体8上半部分的空间中,蓄水罐位于副舱体8下半部分,蓄水罐和气囊共同填充副舱体8内腔。
24.主舱体6顶部设有沿主舱体6长度方向设置的凹槽,凹槽靠近主舱体6艇艏的一端为盲端,凹槽靠近主舱体6艇艉的一端为通孔端,凹槽内转动连接有风能利用模块,风能利用模块可在竖直面内旋转展开或收纳进主舱体6顶部的凹槽中;风能利用模块包括竖直设置的桅杆1,桅杆1顶部设置有风速传感器,桅杆1通过联动装置2与主舱体6在竖直面内转动连接;桅杆1一侧还设有可折叠的风帆,风帆包括与桅杆1转动连接的主帆板3,主帆板3一侧通过带传动装置5转动连接有阻力板4,主帆板3、阻力板4均与桅杆1同向设置;带传动装置5包括一对在水平方向平行设置的连接板502,两个连接板502两端通过一对竖直设置的传动轴503转动连接有两个支架501,两个传动轴503与连接板502垂直设置,两个支架501分别固定在主帆板3和阻力板4上,两个传动轴503通过带传动连接;桅杆1上套设有过渡带轮202,过渡带轮202包括圆筒形的套筒,套筒两端均设有带轮,其中一个带轮连接有调节电机203,另一个带轮与带传动装置5连接;联动装置2包括中空的机壳204,机壳204通过翻转机构与主舱体6在竖直面内转动连接,机壳204内还设有控制桅杆1绕其轴线旋转的旋转机构;翻转机构包括沿主舱体6宽度方向固定在机壳204上的翻转轴206,翻转轴206连接有翻转电机,
翻转电机固定在主舱体6上的凹糟内;旋转机构包括与桅杆1配合的旋转轴201,旋转轴201与桅杆1同轴设置,旋转轴201连接有旋转电机205,旋转电机205和调节电机203均固定在机壳204内。
25.主舱体6底部同样设有沿主舱体6长度方向设置的凹槽,凹槽两端均为盲端,凹槽内转动连接有自稳系统,主舱体6上部和下部的两个凹槽位于同一竖直面;自稳系统包括与主舱体6在竖直面内转动连接的稳向板13,主舱体6内设有控制稳向板13旋转的电机,电机与控制模块连接,稳向板13与电机配合的一端的环形面上设有外齿,稳向板13远离主舱体6的一端设有可调节的水滴状的配重14,稳向板13与桅杆1可在同一竖直面内旋转。
26.翼组件包括一对倾斜设置的连接翼9,连接翼9所在倾斜面与主舱体6轴线所在水平面之间呈一锐角设置,任一连接翼9的两端均贯穿主舱体6与两个副舱体8固定连接,连接翼9为中空结构,连接翼9连通主舱体6和副舱体8;翼组件还包括设置在副舱体8两侧的一对风翼10,两个风翼10水平设置。
27.桨组件包括两对控制航行器垂直升降的辅助螺旋桨7,辅助螺旋桨7的旋转轴201与主舱体6轴线垂直设置,两对辅助螺旋桨7对称设置在副舱体8上;桨组件还包括推进航行器前进的航空螺旋桨11,航空螺旋桨11的旋转轴201与主舱体6的轴线同轴设置,航空螺旋桨11设在主舱体6靠近艇艉的一端。
28.本发明的海空两栖无人航行器,具备两种航行模式:一、水面航行模式,参见图9,主要步骤为:(1)海空两栖无人航行器通过自身的浮力调节模块调节副舱体8中浮力大小,同时稳向板13上的水滴形配重14负责保持航行器的稳定;最终使海空两栖无人航行器稳定的漂浮于水面之上;(2)桅杆1在翻转电机的驱动作用下,使桅杆1在竖直面内逆时针旋转九十度,最终使桅杆1垂直于主舱体6轴线所在水平面;(3)桅杆1上设有可折叠的风帆,风帆随桅杆1展开后,通过调节电机203和带传动装置5调节阻力板4与主帆板3之间的夹角,控制风帆迎风的角度,从而借助海洋风驱动航行器,完成水面航行模式的启动;(4)在海洋风流较小的情况下,主舱体6艉部航空螺旋桨11作为主要的推动力来源;在水面航行模式中,桨组件固定在最小阻力位置处且航空螺旋桨11处于水平位置。
29.二、水上飞行模式,参见图10,主要步骤为:(1)海空两栖航行器在水面航行模式正常航行时,通过导航通信模块接收航行模式切换指令,控制器模块发出控制指令进行航行模式切换;(2)风帆在接收到控制指令后进行折叠,桅杆1通过联动转置进行旋转,从垂直于主舱体6位置顺时针旋转90度进入主舱体6上的凹槽中;(3)稳向板13通过电机进行旋转,从垂直于主舱体6的位置旋转到平行于主舱体6的位置,收纳进主舱体6底部的凹槽中;(4)浮力调节装置调节海空两栖航行器的浮力大小,使副舱体8上两对辅助螺旋桨7完全脱离水面;(5)辅助螺旋桨7在电机的驱动下高速旋转提供升力使海空两栖航行器脱离水面,并且通过控制辅助螺旋桨7的旋转速度调整海空两栖航行器的飞行姿态;
(6)当海空两栖航行器姿态平稳后,航空螺旋桨11在开始提供推力,同时两对辅助螺旋桨7转速逐渐放缓,最终停止旋转并且位置固定在最小阻力位置,从而完成动力源的切换;海空两栖航行器在航空螺旋桨11和翼组件的作用下进行飞行。
30.而且,两种模式之间可随意切换;水上飞行模式切换为水面航行模式的主要步骤为:(1)当海空两栖航行器收到从水上飞行模式切换到水面航行模式的控制指令时,位于副舱体8上的两对辅助螺旋桨7在电机的驱动作用下开始旋转,提供向上的升力,同时艉部航空螺旋桨11提供的动力开始降低;(2)在副舱体8上辅助螺旋桨7和艉部航空螺旋桨11的共同作用下最终使海空两栖航行器在空中悬停,位于主舱体6尾部的航空螺旋桨11停止旋转并且辅助螺旋桨7于水平固定;(3)在保持悬停状态之后,两对辅助螺旋桨7的驱动电机转速开始下降,辅助螺旋桨7提供的升力开始降低,海空两栖航行器开始缓慢从空中降落进入水中;(4)辅助螺旋桨7停止旋转并且固定在最小阻力位置,同时海空两栖无人航行器通过自身的浮力调节模块调节航行器的浮力大小,使航行器漂浮于水面上;(5)稳向板13通过驱动电机进行旋转展开,从平行于主舱体6的位置旋转到垂直于主舱体6的位置;(6)桅杆1在电机的驱动作用下,使桅杆1通过联动装置2旋转九十度,最终使桅杆1垂直于海空两栖无人航行器;(7)桅杆1上设有的折叠风帆从收缩状态向外延伸变成展开状态;风帆完成展开状态之后,通过控制器发出控制信号驱动联动装置2中的调节电机203和旋转电机205调节风帆角度,最终使风帆能够借助海洋风能驱动航行器,完成从飞行模式到水面航行模式的切换。
31.从水面航行模式切换到水上飞行模式进行避险,具体步骤如下:(1)风帆在接收到控制模块控制信号后进行折叠,折叠完成之后桅杆1通过联动装置2进行旋转,从垂直于主舱体6位置绕联动装置2旋转90度进入主舱体6上方的凹槽中;(2)稳向板13通过驱动电机进行旋转,从垂直于主舱体6的位置旋转到平行于主舱体6的位置,收纳进主舱体6底部的凹槽中;(3)浮力调节装置调节海空两栖航行器的浮力大小,使副舱体8上两对辅助螺旋桨7完全脱离水面;(4)辅助螺旋桨7在电机的驱动下旋转提供升力使海空两栖航行器脱离水面,并且通过控制辅助螺旋桨7的旋转速度调整航行器的飞行姿态;(5)当海空两栖航行器姿态平稳后,艉部航空螺旋桨11在控制指令作用下开始提供推力,同时两对辅助螺旋桨7的驱动电机转速逐渐放缓,最终停止旋转并且位置固定在最小阻力位置,完成动力源的切换;海空两栖航行器在艉部航空螺旋桨11和翼组件的作用下进行飞行;(6)在飞行一定距离后,海空两栖航行器对周围环境进行判断,如果安全,海空两栖航行器从飞行模式到水面航行模式进行切换,否则海空两栖航行器继续飞行模式;(7)通过调整辅助螺旋桨7的旋转速度和艉部航空螺旋桨11输出的推力大小最终
使航行器在空中悬停,位于主舱体6艉部的航空螺旋桨11停止旋转并且辅助螺旋桨7水平固定;(8)在保持悬停状态之后,副舱体8上的两对辅助螺旋桨7减速,辅助螺旋桨7提供的升力开始降低,海空两栖航行器开始缓慢从空中降落进水中;(9)副舱体8上的辅助螺旋桨7停止旋转并且固定在最小阻力位置,同时无人航行器通过自身的浮力调节模块调节航行器的浮力大小,使航行器漂浮于水面上;(10)稳向板13通过驱动电机进行旋转,从平行于主舱体6的位置旋转到垂直于主舱体6的位置,收纳进主舱体6底部的凹糟中;(11)桅杆1通过联动装置2旋转九十度,最终使桅杆1垂直于海空两栖无人航行器;桅杆1上的折叠风帆通过带传动装置5从收缩状态向外延伸变成展开状态;(12)风帆完成展开状态之后,通过控制器发出控制信号驱动联动装置2中的调节电机203和旋转电机205调节风帆角度,最终使风帆能够借助海洋风能对航行器进行推动,完成海空两栖航行器的紧急避险。
32.实施例2一种海空两栖无人航行器的布放方法,采用了实施例1中的海空两栖无人航行器,其主要的步骤如下:(1)海空两栖航行器停放于母船上,通过导航通信模块接收到布放信号,控制模块发送相应的控制指令;(2)副舱体8上的两对辅助螺旋桨7在电机的驱动下旋转提供升力使用航行器垂直上升;(3)当海空两栖航行器上升到一定高度后,通过两对辅助螺旋桨7的差速旋转实现航行的水平位移;(4)当航行器位移到水面上空后,两对辅助螺旋桨7转速逐渐降低,航行器高度开始下降,最终航行器降落至水中;(5)辅助螺旋桨7停止旋转并且固定在最小阻力位置,同时海空两栖无人航行器通过自身的浮力调节模块调节航行器的浮力大小,使航行器漂浮于水面上;(6)稳向板13通过驱动电机进行旋转,从平行于主舱体6的位置旋转到垂直于主舱体6的位置,完成稳向板13的展开;(7)桅杆1在电机的驱动作用下,使桅杆1通过联动装置2旋转九十度,最终使桅杆1垂直于海空两栖无人航行器;(8)桅杆1上设有的折叠风帆通过带传动装置5从收缩状态向外延伸变成展开状态;风帆完成展开状态之后,通过控制器发出控制信号驱动联动装置2中的调节电机203和旋转电机205调节风帆角度,完成海空两栖航行的布放任务;其中,风能利用模块和自稳系统的展开顺序无确定的顺序要求,二者可同时展开或按顺序依次展开。
33.一种海空两栖无人航行器的回收方法,采用了实施例1中的海空两栖无人航行器,其主要的步骤如下:(1)海空两栖航行器在水面航行模式下正常航行时,通过导航通信模块接收航行模式切换指令,控制器模块发出相应的控制指令进行航行模式切换;(2)风帆在接收到控制模块控制信号后进行折叠,折叠完成之后桅杆1通过联动转
置进行旋转,从垂直于主舱体6位置绕联动装置2旋转90度进入主舱体6上方的凹槽中;(3)稳向板13通过驱动电机进行旋转,从垂直于主舱体6的位置旋转到平行于主舱体6的位置;(4)浮力调节装置调节海空两栖航行器的浮力大小,使副舱体8上两对辅助螺旋桨7完全脱离水面;(5)辅助螺旋桨7在电机的驱动下高速旋转提供升力使海空两栖航行器脱离水面,并且通过控制辅助螺旋桨7的旋转速度调整海空两栖航行的飞行姿态;(6)当海空两栖航行器上升到一定高度后,通过两对辅助螺旋桨7的差速旋转实现航行的水平位移达到回收地点上空;(7)当航行器位移到回收地点上空后,两对辅助螺旋桨7转速逐渐降低,航行器高度开始下降,最终航行器降落到回收地点,完成海空两栖航行的回收任务。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

