1.本实用新型涉及机器人技术领域,尤其涉及一种电机和足式机器人。
背景技术:
2.伺服电机是足式机器人(也可以称为有腿机器人)常用的驱动装置,用于驱动足式机器人的腿组件,从而使足式机器人能够运动。相关技术中,伺服电机的转子在转动过程中会产生噪音,尤其是在家庭应用场景下,极大影响了用户对足式机器人的使用体验。
技术实现要素:
3.本实用新型旨在至少在一定程度上解决相关技术中的技术问题之一。
4.为此,本实用新型的实施例提出一种电机,该电机产生的噪音小,用户体验好。
5.本实用新型另一方面的实施例提出一种具有该电机的足式机器人。
6.根据本实用新型实施例的电机包括机壳、转子、定子和输出轴,所述转子设在所述机壳内且具有转子轴,所述定子设在所述机壳内,所述输出轴与所述转子轴相连,所述输出轴内设有消音腔、第一连通孔和第二连通孔,所述消音腔通过所述第一连通孔与所述机壳的内腔连通且通过所述第二连通孔与外部环境连通。
7.根据本实用新型实施例的电机,采用共振吸声原理,通过输出轴对电机进行消音降噪,消音效果好,可以有效降低电机在工作时产生的噪音,防止电机产生噪音污染,提高了用户的使用体验。
8.在一些实施例中,所述消音腔沿所述输出轴的轴向延伸且具有扇形横截面。
9.在一些实施例中,所述第一连通孔与所述消音腔的第一端连通,所述第二连通孔与所述消音腔的第二端连通。
10.在一些实施例中,所述第一连通孔和所述第二连通孔均沿所述输出轴的轴向延伸且具有圆形横截面。
11.在一些实施例中,所述消音腔在所述输出轴的轴向上的长度与电机产生的噪音的波长成正比。
12.在一些实施例中,所述第一连通孔的横截面积与所述消音腔的横截面积之比为 1/10
‑
1/3。
13.在一些实施例中,所述消音腔为多个,多个所述消音腔沿所述输出轴的周向均匀间隔布置。
14.在一些实施例中,所述消音腔的第一端和/或第二端设有塞头,所述塞头具有通孔,所述通孔形成所述第一连通孔和/或所述第二连通孔。
15.在一些实施例中,所述塞头设在所述消音腔的第一端。
16.在一些实施例中,所述第一连通孔在所述输出轴的轴向上的长度小于所述第二连通孔在所述输出轴的轴向上的长度。
17.在一些实施例中,还包括行星减速机构,所述行星减速机构包括太阳轮、内齿圈、
行星架和与所述太阳轮和所述内齿圈啮合的多个行星轮,所述太阳轮与所述转子轴同轴相连,多个所述行星轮的行星轴与所述行星架和所述输出轴相连。
18.根据本实用新型另一方面实施例的足式机器人,包括躯身组件和多个腿组件,且所述躯身组件和所述腿组件上均设有电机,所述电机为上述任一实施例所述的电机。
19.在一些实施例中,所述腿组件包括大腿,所述躯身组件与所述大腿通过所述电机相连,所述电机用于驱所述大腿摆动。
20.在一些实施例中,所述腿组件还包括小腿,所述大腿与所述小腿通过所述电机相连,所述电机用于驱动所述小腿摆动。
附图说明
21.图1是根据本实用新型实施例的电机的输出轴的示意图;
22.图2是根据本实用新型实施例的电机的输出轴的正视图;
23.图3是图2中所示的输出轴的a
‑
a剖视图;
24.图4是根据本实用新型实施例的电机的输出轴的后视图;
25.图5是根据本实用新型实施例的电机的输出轴的爆炸图;
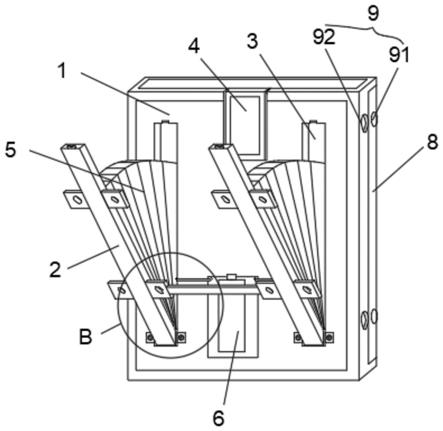
26.图6是根据本实用新型实施例的电机的示意图;
27.图7是根据本实用新型实施例的足式机器人的示意图;
28.附图标记:
29.输出轴1,第一连通孔11,第二连通孔12,消音腔13,塞头14,
30.机壳2,
31.转子3,转子轴31,
32.定子4,
33.太阳轮5,
34.内齿圈6,
35.行星架7,
36.行星轮8,
37.躯身组件9,
38.腿组件10。
具体实施方式
39.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
40.如图6所示,根据本实用新型实施例的电机包括机壳2、转子3、定子4和输出轴1,其中定子4和转子3均设在机壳2内,且转子3具有转子轴31,转子轴31相对于定子4 可转动。
41.如图1
‑
图3所示,输出轴1与转子轴31相连并随转子轴31的转动而转动,输出轴1 用于输出机械能。输出轴1内设有消音腔13、第一连通孔11和第二连通孔12,消音腔13 通过第一连通孔11与机壳2的内腔连通,且消音腔13通过第二连通孔12与外部环境连通。
42.消音腔13是利用共振吸声原理进行消声的,即一个封闭的容积通过一个或多个小
孔与气流通道相连,即可组成一个共振系统。孔径中的空气柱类似一个活塞,具有一定的声质量,空腔类似一个弹簧,具有一定的声顺,空气柱振动时,壁面的摩擦阻尼产生了一定的声阻,整个系统类似接上一个旁支滤波器。当声波入射到共振腔口时,因声阻抗的突然变化,一部分声能将反射回声源,同时,在声波的作用下,孔径中的空气柱产生振动,振动时的摩擦阻尼又使一部分声能转换为热能而耗散掉,这样,仅有少量声能辐射出去,从而达到了消声的目的。
43.电机内部产生的噪音通过第一连通孔11传递至消音腔13内进行消音,并确保消音后的噪音不会造成噪音污染,消音后后的噪音再由第二连通孔12传递至外部环境。
44.根据本实用新型实施例的电机,采用共振吸声原理对电机进行消音降噪,消音效果好,可以有效降低电机在工作时产生的噪音,防止电机产生噪音污染,提高了用户的使用体验。
45.如图2所示,在一些实施例中,消音腔13沿输出轴1的轴向延伸且具有扇形横截面,消音腔13沿输出轴1的轴向延伸,使噪音沿最短的路径传递至外界,可提高消音的效率,此外,消音腔13还起到了减轻输出轴1重量的做用,从而减小输出轴1自身的能量损耗,提高电机的输出功率。
46.需要说明的是,由于电机的输出轴1的横截面形状一般为圆形,消音腔13的横截面形状为扇形,可以提高消音腔13的横截面在输出轴1横截面上所占的比重,从而最大限度地减轻输出轴1的重量。
47.具体地,消音腔13具有第一端和第二端,第一连通孔11的一端与消音腔13的第一端连通,第一连通孔11的另一端与机壳2内腔连通,第二连通孔12的一端与消音腔13的第二端连通,第二连通孔12的另一端与外部环境连通。
48.如图2和图4所示,在一些实施例中,第一连通孔11和第二连通孔12沿输出轴1的轴向延伸且具有圆形横截面,同样地,第一连通孔11与第二连通孔12均沿输出轴1的轴向延伸,噪音经过的路径最短,噪音可以以最短路径经第一连通孔11传递至消音腔13后,再沿第二连通孔12传递至外界,从而提高了消音效率。
49.在一些实施例中,消音腔13在输出轴1的轴向上的长度与电机产生的噪音的波长成正比。由噪音学中的中间插管传音特性可得消音腔13的轴向长度与噪音波长成正比时可屏蔽对应波长的噪音。噪音的波长可通过公式波长=波速/频率计算,频率由电机转速计算得到,经过计算后得出合适的消音腔13的轴向长度。
50.在一些实施例中,第一连通孔11的横截面积与消音腔13的横截面积之比为1/10
‑
1/3。
51.由噪音学中突变截面管特性可得,消音腔13的横截面积与第一连通孔11的横截面积的比值越大,则消音腔13的消音效果越好,因此消音腔13的横截面积应取对应结构的极大值,即消音腔13的横截面积的取值应为条件允许范围内的最大值。
52.对应地,第一连通孔11的横截面积应该越小越好,但是同时要保证机壳2内腔内的噪音可以正常传递至消音腔13内,因此,将第一连通孔11横截面积与消音腔13的横截面积之比设为为1/10
‑
1/3,例如,1/10、1/5、1/6、1/3等等。
53.如图1所示,在一些实施例中,消音腔13为多个,多个消音腔13沿输出轴1的周向均匀间隔布置。每个消音腔13均通过第一连通孔11与机壳2内腔连通且均通过第二连通孔12
与外部环境连通。
54.多个消音腔13同时工作,不同的消音腔13对不同位置处的噪音进行消音降噪,由此,可以大大提高消音降噪效果。
55.如图5所示,在一些实施例中,消音腔13的第一端和/或第二端设有塞头14,塞头14 的形状与消音腔13的横截面形状相对应,塞头14具有通孔,所述通孔形成第一连通孔11 和/或第二连通孔12。
56.需要说明的是,由于消音腔13的横截面积大于第一连通孔11和第二连通孔12的横截面积,因此在加工过程中,至少要从输出轴1的一端加工出消音腔13,并使用塞头14将这一端堵住,塞头14上的通孔形成第一连通孔11或者第二连通孔12。塞头14的材料优选为橡胶材料,塞头14可粘接在消音腔13的第一端和/或第二端。
57.优选地,塞头14设在消音腔13的第一端,即塞头14设在输出轴1靠近壳体内腔的一端,塞头14上的通孔形成第一连通孔11,第二连通孔12直接在输出轴1上加工出来即可,如此设置,塞头14的一端可以与机壳2内的零部件相抵,防止塞头14从输出轴1上脱出,由于只在消音腔13的一端设置塞头14,还减小了在输出轴1上加工通孔对输出轴1强度造成的不良影响。
58.在一些实施例中,第一连通孔11在输出轴1的轴向上的长度小于第二连通孔12在输出轴1的轴向上的长度,消音腔13的长度、第一连通孔11的长度和第二连通孔12的长度之和为输出轴1的总长度,为了提高消音腔13的消音效果,消音腔13的长度应越大越好,而第一连通孔11和第二连通孔12的长度之和占输出轴1总长度的比重较低,并且由于第一连通孔11是由塞头14上的通孔形成的,对输出轴1的强度影响较大,因此,为了尽可能增加输出轴1的强度,第二连通孔12的长度应大于第一连通孔11的长度。
59.如图6所示,根据本实用新型实施例的电机还包括行星减速机构,所述行星减速机构包括太阳轮5、内齿圈6,行星架7和与太阳轮5和内齿圈6啮合的多个行星轮8,太阳轮 5与转子轴31同轴相连,多个行星轮8的行星轴与行星架7和电机输出轴1相连。
60.行星减速机构可以有效降低电机的转速,同时电机的增大输出转矩,设置有行星减速机构的电机还具有重量轻、体积小、传动比范围大、效率高、运转平稳、噪声低适应性强等特点。
61.如图7所示,根据本实用新型另一方面实施例的足式机器人,包括躯身组件9和多个腿组件10,所述躯身组件9和所述腿组件10内均设有电机,所述电机为上述任一实施例所述的电机,所述电机为上述任一实施例的电机。由于电机具有消音降噪的功能,足式机器人在行进过程中产生的噪音低,用户的使用体验好。
62.在一些实施例中,足式机器人的腿组件10包括大腿和小腿,躯身组件9通过电机与大腿相连,电机用于驱动大腿相对于躯身组件9可前后摆动和/或左右摆动,需要说明的是,当需要大腿同时满足左右摆动和前后摆动时,躯身组件9应设置两个或两个以上的电机。大腿通过电机与小腿相连,电机用于驱动小腿相对于大腿可前后摆动。
63.下面参考附图描述根据本实用新型的一些具体示例的电机。
64.如图1
‑
图6所示,根据本实用新型实施例的电机包括机壳2、转子3、定子4、输出轴 1和行星减速机构,其中定子4、转子3和行星减速机构均设在机壳2内,转子3具有转子轴31,行星减速机构包括太阳轮5、内齿圈6,行星架7和与太阳轮5和内齿圈6啮合的多个行星轮8,
太阳轮5与转子轴31同轴相连,多个行星轮8的行星轴与行星架7和电机输出轴1相连,输出轴1用于输出机械能。
65.输出轴1内设有消音腔13、第一连通孔11和第二连通孔12,消音腔13具有第一端和第二端,第一连通孔11的一端与消音腔13的第一端连通,第一连通孔11的另一端与机壳 2内腔连通,第二连通孔12的一端与消音腔13的第二端连通,第二连通孔12的另一端与外部环境连通。
66.消音腔13为多个,多个消音腔13沿输出轴1的周向均匀间隔布置,每个消音腔13均通过第一连通孔11与机壳2内腔连通且均通过第二连通孔12与外部环境连通。消音腔13 沿输出轴1的轴向延伸且具有扇形横截面,消音腔13沿输出轴1的轴向延伸,第一连通孔 11和第二连通孔12沿输出轴1的轴向延伸且具有圆形横截面。
67.消音腔13在输出轴1的轴向上的长度与电机产生的噪音的波长成正比,第一连通孔11 的横截面积与消音腔13的横截面积之比为1/10
‑
1/3。
68.消音腔13的第一端设有塞头14,塞头14具有通孔,塞头14上的通孔形成第一连通孔 11,第一连通孔11在输出轴1的轴向上的长度小于第二连通孔12在输出轴1的轴向上的长度。
69.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
70.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
71.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或彼此可通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
72.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
73.在本实用新型中,术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实
施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
74.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。