1.本公开涉及光学计量,例如,以检测基板上的层的厚度。
背景技术:
2.通常通过将导电层、半导电层或绝缘层按顺序沉积在硅晶片上来在基板上形成集成电路。一个制造步骤涉及在非平面表面之上沉积填料层且使填料层平坦化。对于某些应用而言,填料层被平坦化,直到暴露了图案化的层的顶表面为止。例如,可在图案化的绝缘层上沉积导电填料层以填充绝缘层中的沟槽或孔洞。在平坦化之后,剩余在绝缘层的凸起图案之间的金属层的各部分形成过孔、插塞和接线,其提供基板上的薄膜电路之间的导电路径。对于其他应用而言,在由其他层提供的底层拓扑之上沉积填料层,并且平坦化填料层直至剩余预定厚度为止。例如,介电填料层可沉积在经图案化的金属层之上,且经图案化以提供金属区域之间的绝缘并提供平坦表面以用于进一步的光刻。
3.化学机械抛光(cmp)为一种公认的平坦化方法。此平坦化方法通常需要将基板安装在载体或抛光头上。通常将基板的暴露表面放置成抵靠旋转抛光垫。承载头在基板上提供可控负载以将基板推靠在抛光垫上。通常将磨蚀抛光浆料供应至抛光垫的表面。
4.浆料分布、抛光垫条件、抛光垫与基板之间的相对速度和基板上的负载的变化可能导致材料去除速率的变化。这些变化以及基板层的初始厚度的变化使达到抛光终点所需时间的变化。因此,仅根据抛光时间来确定抛光终点可能导致基板的过度抛光或抛光不足。
5.各种光学计量系统(例如,光谱光学计量系统或椭偏光学计量系统)可用于,例如在内嵌的(in
‑
line)或单独的计量站处,测量基板层在抛光前和抛光后的厚度。另外,可使用各种原位监测技术(诸如单色光学或涡流监测)来检测抛光终点。
技术实现要素:
6.在一个方面中,一种用于获得表示基板上的层的厚度的测量值的系统包括:支撑件,所述支撑件用于固持用于集成电路制造的基板;光学组件,所述光学组件用于通过光以第一入射角撞击基板来捕获由支撑件固持的基板的至少一部分的第一彩色图像,以及通过光以不同的第二入射角撞击基板来捕获由支撑件固持的基板的所述至少一部分的第二彩色图像;以及控制器。控制器被配置成从光学组件接收第一彩色图像和第二彩色图像;存储函数,所述函数根据在至少四个维度的坐标空间中沿预定路径的位置来提供表示厚度的值,所述至少四个维度的坐标空间包括来自第一彩色图像的第一色彩通道和第二色彩通道以及来自第二彩色图像的第三色彩通道和第四色彩通道;针对第一彩色图像的像素以及第二彩色图像中的对应像素,从第一彩色图像中针对所述像素的色彩数据以及第二彩色图像中针对所述对应像素的色彩数据来确定在坐标空间中的坐标;确定在预定路径上最靠近所述坐标的点的位置;以及从函数以及预定路径上的点的位置来计算表示厚度的值。
7.在其他方面中,一种计算机程序包括用于使处理器执行控制器的操作的指令,并且一种抛光方法包括:将用于集成电路制造的基板定位在彩色相机的视野中,从彩色相机
产生基板的彩色图像,以及执行操作。
8.所述方面中的任一者的实施方式可包括以下特征中的一者或多者。
9.坐标空间可以是四维的,或者坐标空间可以是六维的。第一色彩通道和第二色彩通道可选自包括第一彩色图像的色调、饱和度、亮度、x、y、z、红色色度、绿色色度以及蓝色色度的色彩通道的群组。第三色彩通道和第四色彩通道可选自包括第二彩色图像的色调、饱和度、亮度、x、y、z、红色色度、绿色色度以及蓝色色度的色彩通道的群组。第一色彩通道和第三色彩通道可为红色色度,并且第二色彩通道和第四色彩通道可为绿色色度。
10.第一入射角和第二入射角两者可以都在约20
°
至85
°
之间。第一入射角可比第二入射角大至少5
°
,例如,大至少10
°
。
11.在另一方面中,一种抛光系统包括抛光站,所述抛光站包括用于支撑抛光垫的平台;用于固持基板的支撑件;内嵌计量站,所述内嵌计量站用于在抛光站中抛光基板的表面之前和之后测量基板;以及控制器。内嵌计量站包括一个或多个细长的白光源,每个细长的白光源具有纵向轴线并被配置成以非零入射角将光导向基板以在基板上形成照明区域,所述照明区域在基板的扫描期间沿第一轴线延伸;具有检测器元件的第一彩色线扫描相机,所述检测器元件被布置成接收以第一入射角撞击基板的从基板反射的光,并形成在基板的扫描期间沿第一轴线延伸的图像部分;具有检测器元件的第二彩色线扫描相机,所述检测器元件被布置成接收以不同的第二入射角撞击基板的从基板反射的光,并形成在基板的扫描期间沿第一轴线延伸的第二图像部分;支撑一个或多个光源、第一彩色线扫描相机以及第二彩色线扫描相机的框架;以及电机,所述电机引起框架与支撑件之间沿垂直于第一轴线的第二轴线的相对运动,以使一个或多个光源、第一彩色线扫描相机以及第二彩色线扫描相机在基板上进行扫描。控制器被配置成从第一彩色线扫描相机和第二彩色线扫描相机接收色彩数据,以从来自第一彩色线扫描相机的色彩数据产生第一二维彩色图像以及从来自第二彩色线扫描相机的色彩数据产生第二二维彩色图像,以及基于第一二维彩色图像和第二二维彩色图像控制在抛光站处的抛光。
12.在其他方面中,一种计算机程序包括用于使处理器执行控制器的操作的指令,并且一种抛光方法包括将用于集成电路制造的基板定位在彩色相机的视野中,从彩色相机产生基板的彩色图像,以及执行操作。
13.所述方面中的任一者的实施方式可包括以下特征中的一者或多者。
14.一个或多个漫射器可定位在一个或多个细长的白光源与基板之间的光路径上。
15.第一入射角和第二入射角两者可以都在约5
°
至85
°
之间,例如,都在约20
°
至75
°
之间。第一入射角可比第二入射角大至少5
°
,例如,大至少10
°
。第一彩色线扫描相机和第二线扫描相机可被配置成对基板上的重合区域成像。一个或多个细长光源可包括用于产生以第一入射角撞击基板的光的第一细长光源,以及用于产生以第二入射角撞击基板的光的第二细长光源。来自第一光源的光和来自第二光源的光可撞击基板上的重叠区域,例如,重合区域。
16.框架可以是固定的,并且电机可耦接至支撑件,并且控制器可被配置成使电机移动支撑件,同时一个或多个细长光源和第一彩色线扫描相机以及第二彩色线扫描相机保持固定以在基板上进行扫描。
17.实施方式可包括以下潜在优势中的一者或多者。可提高厚度测量的准确度。此信
息可在用于控制抛光参数的前馈或反馈中使用,从而提供改良的厚度均匀性。用于确定变化的算法可能是简单的并且具有低的计算负荷。
18.在附图和以下描述中阐述一个或多个实施方式的细节。其他方面、特征和优势将根据说明书和附图以及根据权利要求书而显而易见。
附图说明
19.图1a示出内嵌光学测量系统的示例的示意图。
20.图1b示出原位光学测量系统的示例的示意图。
21.图1c示出测量系统的一部分的示例的示意图。
22.图2为确定层厚度的方法的流程图。
23.图3为基板的示意性俯视图。
24.图4为掩模的示意图。
25.图5示出示例曲线图,所述曲线图显示在两个色彩通道的坐标空间中从基板反射的光的色彩的演变。
26.图6示出示例曲线图,所述曲线图显示在两个色彩通道的坐标空间中的预定路径。
27.图7为根据彩色图像数据来确定层厚度的方法的流程图。
28.图8示出示例曲线图,所述曲线图显示从测试基板的彩色图像导出的两个色彩通道的坐标空间中的直方图。
29.图9a和图9b示出示例曲线图,所述曲线图分别示出在色彩校正之前和之后的两个色彩通道的坐标空间中的直方图。
30.在各个附图中相同附图标记指示相同元件。
具体实施方式
31.可在抛光之前或之后(例如,在内嵌的或独立的计量站处)或在抛光期间(例如,通过原位监测系统)以光学方式测量基板上的层的厚度。然而,一些光学技术(诸如光谱测定法)需要昂贵的光谱仪和对光谱数据的计算繁重的操纵。即使除了计算负荷以外,在某些情况下,算法结果还是无法满足用户不断增长的准确度要求。
32.一种测量技术为获取基板的彩色图像,并在色彩空间中分析所述图像以确定层的厚度。具体而言,二维色彩空间中沿路径的位置可提供关于抛光的当前状态的信息,例如,去除量或剩余材料的量。然而,在一些情况下,可能难以解析出图像中的色彩之间的差别。通过对图像执行色彩校正,可增加色彩对比度。因此,可增强厚度分辨率,并且可提高厚度测量的可靠性和准确度。
33.另一个问题是二维色彩空间中的路径可能具有简并性。通过增加色彩空间的维数,可降低简并的可能性。一种技术为使用一种类型的相机(例如,高光谱相机),所述相机产生具有四个或更多个(例如,六至二十个)色彩通道的图像。另一技术为使用多个相机,但以不同入射角使用(由于以不同入射角穿过薄膜层的光路径的长度不同,会产生不同的撞击并因而产生不同的色彩)。
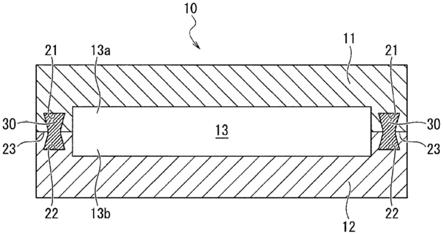
34.参考图1,抛光设备100包括内嵌(也称作顺序式)光学计量系统160,例如,彩色成像系统。
35.抛光设备100包括一个或多个承载头126、一个或多个抛光站106,以及传送站,一个或多个承载头126中的每个承载头126被配置成承载基板10,所述传送站用于将基板装载至承载头和从承载头卸除基板。每个抛光站106包括被支撑在平台120上的抛光垫130。抛光垫130可为具有外抛光层和较软垫层的双层抛光垫。
36.承载头126可从支撑件128悬垂,且可在抛光站之间移动。在一些实施方式中,支撑件128为架空轨道,且承载头126耦接至托架108,托架108安装至所述轨道。架空轨道128允许将每个托架108选择性地定位在抛光站124和传送站之上。替代地,在一些实施方式中,支撑件128为可旋转转盘,并且转盘的旋转使承载头126同时沿圆形路径移动。
37.抛光设备100的每个抛光站106可包括端口(例如,在臂134的末端处),以将抛光液体136(诸如磨蚀浆料)分配至抛光垫130上。抛光设备100的每个抛光站106还可包括衬垫调节设备,以磨削(abrade)抛光垫130以便将抛光垫130维持在一致的磨蚀状态。
38.每个承载头126可操作以将基板10固持成抵靠抛光垫130。每个承载头126可具有对与每个相应基板相关联的抛光参数(例如,压力)的独立控制。具体而言,每个承载头126可包括固定环142,以将基板10固定在柔性膜状物144下方。每个承载头126还包括由膜状物限定的多个独立可控的可加压腔室(例如,三个腔室146a至146c),所述腔室可将独立可控的加压施加至柔性膜状物144上的相关联区并因而施加至基板10上。尽管为了易于说明而仅在图1中图示了三个腔室,但可能存在一个或两个腔室,或四个或更多个腔室,例如,五个腔室。
39.每个承载头126从支撑件128悬垂,且通过驱动轴154连接至承载头旋转电机156,以使得承载头可围绕轴线127旋转。可选地,每个承载头140可横向地振荡,例如,通过驱动轨道128上的托架108,或通过转盘自身的旋转振荡。在操作中,平台围绕其中心轴线121旋转,并且每个承载头围绕其中心轴线127旋转且在抛光垫的顶表面上横向地平移。横向扫动是在平行于抛光表面212的方向上。横向扫动可为直线的或弧形的运动。
40.控制器190(诸如可编程计算机)连接至每个电机,以独立地控制平台120和承载头126的旋转速率。例如,每个电机可包括编码器,所述编码器测量相关联驱动轴的角位置或旋转速率。类似地,控制器190连接至每个托架108中的致动器和/或转盘的旋转电机,以独立地控制每个承载头126的横向运动。例如,每个致动器可包括线性编码器,所述线性编码器测量托架108沿轨道128的位置。
41.控制器190可包括中央处理单元(cpu)、存储器、以及支持电路,例如,输入/输出电路系统、电源供应器、时钟电路、高速缓存等。存储器连接至cpu。存储器为非暂时性计算机可读介质,且可为一个或多个易获取的存储器,诸如随机存取存储器(ram)、只读存储器(rom)、软盘、硬盘,或其他形式的数字存储。另外,尽管被示出为单个计算机,但控制器190可为分布式系统,例如,包括多个独立操作的处理器和存储器。
42.内嵌光学计量系统160定位于抛光设备100内,但不在抛光操作期间执行测量;相反,测量是在抛光操作之间(例如,在将基板从一个抛光站移动至另一抛光站或从传送站移动或移动至传送站的同时)收集的。
43.内嵌光学计量系统160包括传感器组件161,传感器组件161被支撑在抛光站106中的两个抛光站106之间的位置处(例如,在两个平台120之间)。具体而言,传感器组件161位于一定位置处,使得由支撑件128支撑的承载头126可将基板10定位在传感器组件161之上。
44.在其中抛光设备100包括三个抛光站且按顺序将基板从第一抛光站载运至第二抛光站、至第三抛光站的实施方式中,一个或多个传感器组件161可定位在传送站与第一抛光站之间、在第一抛光站与第二抛光站之间、在第二抛光站与第三抛光站之间、和/或在第三抛光站与传送站之间。
45.传感器组件161可包括光源162、光检测器164、以及用于在控制器190与光源162以及光检测器164之间发送和接收信号的电路系统166。
46.光源162可操作以发射白光。在一个实施方式中,所发射的白光包括具有200至800纳米的波长的光。适当光源为白光发光二极管(led)的阵列,或氙气灯或氙气汞灯。光源162经定向为以非零入射角α将光168导向至基板10的暴露表面上。入射角α可为例如约30
°
至75
°
,例如,50
°
。
47.光源可照亮横跨基板10的宽度的基本上线性的细长区域。光源162可包括光学元件(例如,扩束器),以使来自光源的光散布至细长区域中。替代地或附加地,光源162可包括光源的线性阵列。光源162自身以及基板上被照亮的区域可为细长的,且具有平行于基板表面的纵向轴线。
48.来自光源168的光168可为部分准直的。
49.可将漫射器170放置在光168的路径上,或者光源162可包括漫射器,以便在光到达基板10之前将光扩散。
50.检测器164可以是对来自光源162的光敏感的彩色相机。检测器164包括用于每个色彩通道的检测器元件178的阵列。例如,检测器164可包括用于每个色彩通道的ccd阵列。在一些实施方式中,阵列为单行检测器元件178。例如,相机可为线扫描相机。检测器元件的行可平行于由光源162照亮的细长区域的纵向轴线或垂直于基板上的所照亮区域的运动方向而延伸(图1a示意性地图示元件178,但元件178可布置在延伸至示图的平面以外的线中)。在一些实施方式中,检测器为基于棱镜的彩色相机。检测器164内部的棱镜将光束168分成三个单独光束,每个光束被发送至单独的检测器元件阵列。
51.在光源162包括发光元件的行的情况下,检测器元件的行可沿平行于光源162的纵向轴线的第一轴线延伸。检测器元件的行可包括1024个或更多个元件。
52.确定检测器元件的行的平行或垂直定位应考虑到光束的反射,例如,通过折叠镜或从棱镜面的反射。
53.检测器164配置有合适的聚焦光学元件172,以将基板的视场投影至检测器元件178的阵列上。视场可足够长,以查看基板10的整个宽度,例如,150mm至300mm长。传感器组件161(包括检测器164和相关联的光学元件172)可被配置成使得个体像素对应于具有等于或小于约0.5mm的长度的区域。例如,假设视场为约200mm长且检测器164包括1024个元件,则线扫描相机所产生的图像可具有长度为约0.5mm的像素。为了确定图像的长度分辨率,视场(fov)的长度可除以fov成像至其上的像素的数目,以获得长度分辨率。
54.检测器164还可被配置成使得像素宽度与像素长度相当。例如,线扫描相机的优势为其非常快的帧率。帧率可为至少5khz。可将帧率设定为一定的频率,使得当成像区域在基板10上扫描时,像素宽度与像素长度相当,例如,等于或小于约0.3mm。例如,像素宽度和长度可为约0.1mm至0.2mm。
55.光源162和光检测器164可被支撑在台180上。在光检测器164为线扫描相机的情况
下,光源162和相机164可相对于基板10移动,使得成像区域可在整个基板长度上扫描。具体而言,相对运动可在平行于基板10的表面且垂直于线扫描相机164的检测器元件的行的方向上。
56.在一些实施方式中,台182为固定的,并且承载头126例如通过托架108的运动或通过转盘的旋转振荡来移动。在一些实施方式中,台180可移动,而承载头126保持固定以用于图像获取。例如,台180可通过线性致动器182沿轨道184可移动。在任一情形下,这允许当被扫描区域在基板10上移动时,光源162和相机164相对于彼此停留在固定位置处。
57.另外,基板可由机器人固持并移动经过固定光学组件161。例如,在盒式接口单元或其他因素接口单元的情形下,基板可由机器人固持,所述机器人用于将基板传送至盒或从盒传送基板(而不是被支撑在单独的台上)。光检测器可为盒式接口单元中的固定元件(例如,线扫描相机),并且机器人可使基板移动经过光检测器以扫描基板,从而产生图像。
58.具有一起在基板上移动的线扫描相机和光源的可能优势在于(例如,如与常规2d相机相比较而言),对于在晶片上的不同位置,光源与相机之间的相对角度保持恒定。因此,可减少或消除由视角的变化所引起的伪影。另外,线扫描相机可消除透视失真,而常规2d相机表现出固有的透视失真,随后需要通过图像变换来校正所述透视失真。
59.传感器组件161可包括用于调整基板10与光源162以及检测器164之间的垂直距离的机构。例如,传感器组件161可为用于调整台180的垂直位置的致动器。
60.可选地,偏振滤光器174可定位在光路径上,例如,在基板10与检测器164之间。偏振滤光器184可为圆形偏振器(cpl)。典型cpl为线性偏振器与四分之一波片的组合。偏振滤光器184的偏振轴的恰当定向可减小图像中的雾度并锐化或增强期望的视觉特征。
61.可在检测器164附近放置一个或多个挡板188,以防止杂散光或环境光到达检测器164(参见图1c)。例如,挡板可大体上平行于光束168且在光束进入检测器164的区域周围延伸。另外,检测器164可具有窄的接受角,例如,1
°
至10
°
。这些机构可通过减少杂散光或环境光的影响来提高图像质量。
62.假设基板上的最外层为半透明层(例如,介电层),则在检测器164处检测到的光的色彩取决于例如基板表面的成分、基板表面光滑度、和/或从基板上的一个或多个层(例如,介电层)的不同接口反射的光之间的干涉量。
63.如上所述,光源162和光检测器164可连接至计算装置(例如,控制器190),所述计算装置可操作以控制光源162和光检测器164的操作并接收光源162和光检测器164的信号。
64.内嵌光学计量系统160定位于抛光设备100内,但不在抛光操作期间执行测量;相反,测量是在抛光操作之间(例如,在基板从一个抛光站移动至另一抛光站或从传送站移动或移动至传送站的同时)收集的。
65.内嵌光学计量系统160包括传感器组件161,传感器组件161被支撑在抛光站106中的两个抛光站106之间的位置处(例如,在两个平台120之间)。具体而言,传感器组件161位于一定位置处,使得由支撑件128支撑的承载头126可将基板10定位在传感器组件161之上。
66.参考图1b,抛光设备100'包括原位光学监测系统160',例如,彩色成像系统。原位光学监测系统160'与内嵌光学计量系统160构造类似,但传感器组件161的各种光学部件(例如,光源162、光检测器164、漫射器170、聚焦光学元件172以及偏振滤光器174)可定位在平台120中的凹槽122中。当基板接触抛光垫130并由抛光垫130抛光时,光束168可穿过窗口
132以撞击基板10的表面。平台120的旋转使传感器组件161、并且因此使光束168扫过基板10。当传感器组件161扫动至基板10下方时,可从线图像的序列重构2d图像。不需要台180,因为传感器组件161的运动是由平台120的旋转提供的。
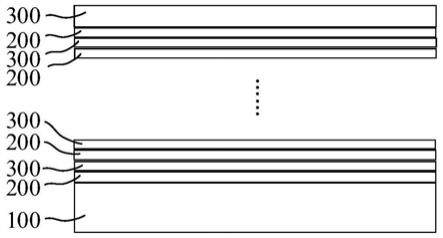
67.参考图2,控制器将来自光检测器164(无论是内嵌计量系统还是原位监测系统)的各个图像线组装成二维彩色图像(步骤200)。作为彩色相机,光检测器164可包括用于红色、蓝色和绿色中的每一者的单独检测器元件。二维彩色图像可包括针对红色、蓝色和绿色色彩通道中的每一者的单色图像204、206、208。
68.控制器可将偏移和/或增益调整施加至每个色彩通道中的图像的强度值(步骤210)。每个色彩通道可具有不同的偏移和/或增益。
69.为了设定增益,可通过由系统160、160'进行的测量来将参考基板(例如,裸硅晶片)成像。随后可设定针对每个色彩通道的增益,使得参考基板在图像中呈现灰色。例如,可设定增益以使得红色、绿色和蓝色通道可以都给出相同的8位值,例如,rgb=(121,121,121)或rgb=(87,87,87)。可使用同一参考基板对多个系统执行增益校准。
70.可选地,可将图像归一化(步骤220)。例如,可计算所测量图像与标准预定义图像之间的差别。例如,控制器可为红色、绿色和蓝色色彩通道中的每一者存储背景图像,并且可从每个色彩通道的所测量图像中减去背景图像。替代地,可将所测量图像除以标准预定义图像。
71.可对图像滤波以去除低频空间变化(步骤230)。在一些实施方式中,图像自红绿蓝(rgb)色彩空间变换为色度饱和度亮度(hsl)色彩空间,在hsl色彩空间中应用滤波器,并且随后将图像变换回红绿蓝(rgb)色彩空间。例如,在hsl色彩空间中,可对亮度通道滤波以去除低频空间变化,即,不对色调和饱和度通道进行滤波。在一些实施方式中,亮度通道用于产生滤波器,所述滤波器接着被应用于红色、绿色和蓝色图像。
72.在一些实施方式中,仅沿第一轴线执行平滑化。例如,沿行进方向186的像素的亮度值可被一起平均以提供平均亮度值,所述平均亮度值仅为沿第一轴线的位置的函数。接着,图像像素的每一行可除以平均亮度值的对应部分,所述平均亮度值为沿第一轴线的位置的函数。
73.可执行色彩校正以增大图像中的色彩对比度(步骤235)。尽管被图示成在步骤230的滤波之后,但是色彩校正可在滤波之前但在步骤220的归一化之后执行。另外,可稍后执行色彩校正,例如,在厚度的计算(在步骤270中)之前。
74.可通过将色彩空间中的值乘以色彩校正矩阵来执行色彩校正。这可表示为运算i
校正
=i
原始
×
ccm,其中i
原始
为原始的未经校正的图像,ccm为色彩校正矩阵,并且i
校正
为经校正的图像。
75.更正式地,色彩校正可作为如下所表示的矩阵乘法来执行:其中i
o1
、i
o2
和i
o3
为来自色彩空间(例如,hsl色彩空间、rgb色彩空间,等等)的三个色彩通道的原始值,a11...a33为色彩校正矩阵的值,并且i
c1
、i
c2
和i
c3
为色彩空间中的三个色彩通道的经校正值。可使用伽马函数而非具有恒定值的色彩校正矩阵。
76.如由图9a和图9b所示,应用色彩校正使直方图的比例增大。这可能使得对层厚度的确定更加容易,因为由于更大的分隔而使在直方图中区分不同点变得更加容易。因此,可增强厚度分辨率。
77.可通过制作具有多种预选色彩的参考基板的彩色图像来产生色彩校正矩阵。测量每个色彩通道的值,并且接着计算用于将低对比度图像变换为较高对比度图像的最佳矩阵。
78.控制器可使用图像处理技术来分析图像以在基板10上定位晶片取向特征16(例如,晶片凹口或晶片平坦)(参见图4)(步骤240)。图像处理技术还可用于定位基板10的中心18(参见图4)。
79.基于此数据,将图像变换(例如,缩放和/或旋转和/或平移)到标准图像坐标系(步骤250)。例如,可平移图像以使得晶片中心位于图像的中心点处,和/或可缩放图像以使得基板的边缘位于图像的边缘,和/或可旋转图像以使得在图像的x轴与连接晶片中心和晶片取向特征的径向区段之间存在0
°
角。
80.可选地,可施加图像掩模以筛选出图像数据的各部分(步骤260)。例如,参考图3,典型基板10包括多个管芯12。刻划线14可将管芯12分开。对于一些应用而言,可能有用的是仅处理对应于管芯的图像数据。在此情形下,参考图4,图像掩模可由控制器存储,所述图像掩模具有在空间位置上对应于管芯12的未遮蔽区域22以及对应于刻划线14的遮蔽区域24。对应于遮蔽区域24的图像数据在阈值化步骤期间未经处理或未经使用。替代地,遮蔽区域24可对应于管芯,使得未遮蔽区域对应于刻划线,或者未遮蔽区域可仅为每个管芯的一部分而每个管芯的剩余部分被遮蔽,或者未遮蔽区域可为一个或多个特定管芯而剩余管芯和刻划线被遮蔽,未遮蔽区域可仅为一个或多个特定管芯的一部分而基板上的每个管芯的剩余部分被遮蔽。在一些实施方式中,用户可使用控制器190上的图形用户接口来定义掩模。
81.可使用此阶段的色彩数据来计算表示厚度的值(步骤270)。此值可为厚度,或已去除材料的量,或指示抛光工艺的进展量(例如,与参考抛光工艺相比较而言)的值。可针对图像中的每个未遮蔽像素执行所述计算。接着可在用于控制抛光参数的前馈或反馈算法中使用此值,从而提供改良的厚度均匀性。例如,可将每个像素的值与目标值进行比较以产生误差信号图像,并且此误差信号图像可用于前馈或反馈控制。
82.将讨论有助于理解值表示的计算的一些背景。对于来自彩色图像的任何给定像素,可从给定像素的色彩数据提取对应于两个色彩通道的一对值。因此,每对值可定义第一色彩通道和不同的第二色彩通道的坐标空间中的坐标。可能的色彩通道包括色调、饱和度、亮度、x、y、z(例如,来自cie 1931xyz色彩空间)、红色色度、绿色色度以及蓝色色度。根据已知算法,可根据来自其他通道的值的元组来计算这些色彩通道的这些值(例如,可从r、g和b来计算x、y和z)。
83.参考图5,例如,当抛光开始时,值对(例如,v10、v20)定义两个色彩通道的坐标空间500中的初始坐标502。然而,因为反射光的光谱随着抛光进展而改变,所以光的色彩组成改变,并且两个色彩通道中的值(v1,v2)将改变。因此,两个色彩通道的坐标空间内的坐标位置将随着抛光进展而改变,从而在坐标空间500中绘制出路径504。
84.参考图6和图7,为了计算表示厚度的值,存储(例如,在控制器190的存储器中)两个色彩通道的坐标空间500中的预定路径604(步骤710)。所述预定路径是在基板的测量之
前产生的。路径404可从开始坐标402行进至结束坐标406。路径404可表示整个抛光工艺,其中开始坐标402对应于基板上的层的开始厚度,并且结束坐标对应于所述层的最终厚度。替代地,所述路径可仅表示抛光工艺的一部分,例如,在抛光终点处基板上的层厚度的预期分布。
85.在一些实施方式中,为了产生预定路径404,将经设置基板抛光至大致为将用于器件基板的目标厚度。使用光学计量系统160或光学监测系统160'来获得经设置基板的彩色图像。因为基板上的抛光速率通常并不均匀,所以基板上的不同位置将具有不同厚度,并且因此反射不同色彩,并且因此在第一色彩通道和第二色彩通道的坐标空间内具有不同坐标。
86.参考图8,使用未遮蔽区域内包含的像素来计算二维(2d)直方图。即,使用经色彩校正的彩色图像,使用来自经设置基板的未遮蔽部分的像素中的一些或全部像素的坐标值,在第一色彩通道和第二色彩通道的坐标空间中产生散点图800。散点图中的每个点802为特定像素的两个色彩通道的值对(v1,v2)。散点图800可显示在控制器190或另一计算机的显示器上。
87.如上所述,可能的色彩通道包括色调、饱和度、亮度、x、y、z(例如,来自cie 1931 xyz色彩空间)、红色色度、绿色色度和蓝色色度。在一些实施方式中,第一色彩通道为红色色度(r)且第二色彩通道为绿色色度(g),其分别可由和定义,其中r、g和b为彩色图像的红色、绿色和蓝色色彩通道的强度值。
88.可由用户(例如,半导体制造设施的操作者)使用图形用户界面结合计算机(例如,控制器190)手动地创建厚度路径604。例如,在显示散点图的同时,用户可手动构建遵循散点图并覆盖散点图的路径,例如,使用鼠标操作以点选散点图中的显示的选定点。
89.替代地,可使用软件自动产生厚度路径604,所述软件被设计成分析散点图中的坐标集,并且例如使用拓扑骨架化来产生拟合散点图800中的点的路径。
90.可通过多种函数来提供厚度路径604,例如,使用单条线、多段线、一个或多个圆弧、一个或多个贝塞尔曲线等。在一些实施方式中,通过多段线来提供厚度路径604,所述多段线为在坐标空间中的离散点之间绘制的线段集。
91.返回图6,函数提供预定厚度路径604上的位置与厚度值之间的关系。例如,控制器190可存储针对预定厚度路径604的起点602的第一厚度值,以及针对预定厚度路径604的终点606的第二厚度值。可通过使用常规厚度计量系统在对应于提供分别最靠近起点602和终点606的点802的像素的位置处测量基板层的厚度来获得第一和第二厚度值。
92.在操作中,控制器190可通过基于从起点602至给定点610沿路径604的距离在第一值与第二值之间进行插值,来计算表示路径604上的给定点610的厚度的值。例如,如果控制器可根据以下等式来计算给定点610的厚度t:其中t1为起点602的值,t2为终点606的厚度,l为起点602与终点606之间沿路径的总距离,并且d为起点602与给定点610之间沿路径的距离。
93.作为另一示例,控制器190可存储预定厚度路径604上的每个顶点的厚度值,并且
基于两个最接近的顶点之间的插值来计算表示路径上给定点的厚度的值。对于此配置,可通过使用常规厚度计量系统在对应于提供最靠近顶点的点802的像素的位置处测量基板层的厚度,来获得顶点的各种值。
94.使路径上的位置与厚度相关的其他函数是可能的。
95.另外,可基于光学模型进行计算来获得厚度值,而不是使用计量系统测量经设置基板的厚度。
96.如果基于已知的“经设置”晶片使用理论模拟或经验学习,则厚度值可为实际厚度值。替代地,预定厚度路径上给定点处的厚度值可为例如相对于基板的抛光程度的相对值。此后一个值可在下游工艺中被缩放以获得经验值,或者可简单地用于表示厚度的增加或减少而无需指定绝对厚度值。
97.参考图6和图7,对于从基板的图像中分析的像素,从此像素的色彩数据中提取两个色彩通道的值(步骤720)。这提供两个色彩通道的坐标系统600中的坐标620。
98.接下来,计算在预定厚度路径604上最靠近像素的坐标620的点(例如,点610)(步骤730)。在此上下文中,“最靠近的”不一定指示几何完美。可以以各种方式定义“最靠近的”点,并且处理能力的局限性、为易于计算而选择搜索函数、在搜索函数中存在多个局部最大值等等都可阻止几何理想的确定,但仍提供足够好以用于使用的结果。在一些实施方式中,将最靠近的点定义成厚度路径604上的定义了穿过像素的坐标620的针对厚度路径的法线向量的点。在一些实施方式中,通过使欧几里德距离最小化来计算最靠近的点。
99.接着,基于点610在路径604上的位置从函数计算出表示厚度的值,如上文所讨论的(步骤740)。最靠近的点不一定为多段线的顶点中的一者。如上所述,在此情形下,可使用插值来获得厚度值(例如,基于多段线的最接近的顶点之间的简单线性插值)。
100.通过针对彩色图像中的像素中的一些或全部像素重复步骤720至740,可产生基板层的厚度图。
101.对于基板上的一些层堆叠而言,预定厚度路径将与自身交叉,这导致被称作简并的情况。预定厚度路径上的简并点(例如,点650)具有与其相关联的两个或更多个厚度值。因此,在没有一些额外信息的情况下,可能无法得知哪个厚度值为正确值。然而,有可能分析与来自基板上给定物理区域(例如,在给定管芯内)的像素相关联的坐标群集的性质,并使用此额外信息来解决简并。例如,可假设基板的给定小区域内的测量值不会明显变化,并且因此将沿散点图占据较小部分,即,不会沿两个分支延伸。
102.如此,控制器可分析与来自基板上的给定物理区域的像素相关联的坐标群集,所述给定物理区域围绕需要解决简并的像素。具体而言,控制器可确定群集在坐标空间中的主轴。可选择预定厚度路径的最接近地平行于群集的主轴的分支,并将所述分支用于计算表示厚度的值。
103.返回图2,可选地,可对基板的每个区域(例如,每个管芯)或对整个图像执行均匀性分析(步骤280)。例如,可将每个像素的值与目标值进行比较,并且可针对管芯计算管芯内“失效”像素(即,不满足目标值的像素)的总数。可将此总数与阈值进行比较,以确定管芯是否为可接受的,例如,如果总数小于阈值,则将管芯标记为可接受的。这给出了每个管芯的通过/失效指示。
104.作为另一示例,可计算在基板的未遮蔽区域内的“失效”像素的总数。可将此总数
与阈值进行比较,以确定基板是否为可接受的,例如,如果总数小于阈值,则将基板标记为可接受的。阈值可由用户设定。这给出了基板的通过/失效指示。
105.在管芯或晶片被确定为“失效”的情况下,控制器190可产生警报或使抛光系统100采取校正动作。例如,可产生声音或视觉警报,或可产生指示特定管芯不可用的数据文件。作为另一示例,可将基板送回进行返工。
106.与通常由1024个或更多个强度值表示像素的光谱处理相反,在彩色图像中,可仅通过三个强度值(红、绿和蓝)表示像素,并且仅需要两个色彩通道来进行计算。因此,处理彩色图像的计算负荷明显降低。
107.然而,在一些实施方式中,光检测器164为光谱仪而不是彩色相机。例如,光检测器可包括高光谱相机。此类光谱相机可针对每个像素的30至200个(例如,100个)不同波长产生强度值。接着,不是如上所述的二维色彩空间中的值对,而是将所述技术(步骤210至270)应用于具有带有n个色彩通道的n维色彩空间的图像,其中n显著大于2,例如,10至1000个维度。例如,厚度路径604可为n维色彩空间中的路径。
108.在一些实施方式中,在后续步骤期间不会减少色彩空间的维数和色彩通道的数目;每个维度对应于由高光谱相机测量强度值的波长。在一些实施方式中,色彩空间的维数和通道的数目减少了例如10至100倍,例如,减少到10至100个维度和通道。可通过仅选择某些通道(例如,某些波长)或通过组合通道(例如,组合(诸如,取平均)多个波长的测量的强度值)来减少通道数目。大体而言,较大的通道数目减少了路径中简并的可能性,但具有较大的计算机处理成本。可凭经验确定合适的通道数目。
109.用于增大彩色图像的维数的另一技术是使用具有不同入射角的多个光束。除了如下所述内容以外,此类实施例可类似于图1a和图1b进行配置。参考图1c,(内嵌计量系统160或原位监测系统160'的)传感器组件161可包括多个光源,例如,两个光源162a、162b。每个光源都产生光束(例如,光束168a和168b),所述光束以不同入射角导向基板10。光束168a和168b的入射角可至少间隔5
°
,例如至少间隔10
°
,例如至少间隔20
°
。如图1c中所示,光束168a、168b可撞击基板10上的同一区域,例如,在基板10上重合。替代地,光束可撞击不同区域,例如,部分重叠但不完全重叠的区域,或不重叠的区域。
110.光束168a、168b从基板10反射,且分别通过检测器元件178a、178b的两个不同阵列在多个像素处测量多个色彩的强度值。如图1c中所示,检测器元件178a、178b可由不同的光检测器164a、164b提供。例如,两个检测器164a、164b可各自为彩色线扫描相机。然而,在一些实施方式中,存在具有二维阵列的单个光检测器,且光束168a、168b撞击检测器的阵列的不同区域。例如,检测器可为2d彩色相机。
111.使用具有不同入射角的两个光束有效地使彩色图像的维数加倍。例如,使用两个光束168a、168b,其中每个光检测器164a、164b为彩色相机,对于总共六个色彩通道而言,每个检测器将通过三个色彩通道(例如,分别为红色、蓝色和绿色色彩通道)输出彩色图像。这提供了较大的通道数目并减少了路径中简并的可能性,但仍具有可管理的处理成本。
112.尽管图1c将每个光束168a、168b图示为具有其自己的光学部件(例如,漫射器170、聚焦光学元件172和偏振器174),但还有可能使所述束共享一些部件。例如,可在两个光束168a、168b的路径中放置单个漫射器170和/或单个偏振器174。类似地,尽管示出多个光源162a、162b,但来自单个光源的光可(例如,通过部分反射镜)分成多个束。
113.可用通道的数目来缩放色彩校正。对于色彩校正步骤而言,代替i
原始
为1
×
3矩阵且ccm为3
×
3矩阵,i
原始
可为1
×
n矩阵且ccm可为n
×
n矩阵。例如,对于两个光束以不同角度入射并由两个彩色相机测量的实施例,i
原始
可为1
×
6矩阵且ccm可为6
×
6矩阵。
114.大体而言,可使用诸如基板上的层的所计算的厚度之类的数据来控制cmp设备的一个或多个操作参数。操作参数包括例如平台旋转速度、基板旋转速度、基板的抛光路径、基板在板上的速度、施加在基板上的压力、浆料成分、浆料流动速率,以及基板表面的温度。可实时地控制操作参数,并且可在不需要进一步人工干预的情况下自动地调整操作参数。
115.如在本说明书中所使用,术语基板可包括例如产品基板(例如,其包括多个存储器或处理器管芯)、测试基板、裸基板以及门控基板。基板可处于集成电路制造的各个阶段,例如,基板可为裸晶片,或基板可包括一个或多个经沉积和/或经图案化的层。术语基板可包括圆形碟和矩形薄片。
116.然而,以上所述的彩色图像处理技术在3d垂直nand(vnand)闪存的情形中可能尤其有用。具体而言,在vnand制造中所使用的层堆叠如此复杂,以致于目前的计量方法(例如,nova光谱分析)在检测厚度不适当的区域时可能无法以足够的可靠性执行。相反,彩色图像处理技术可具有出众的处理量。
117.本发明的实施例以及在本说明书中所描述的所有功能操作可在数字电子电路系统中实施,或在计算机软件、固件或硬件中(包括本说明书中所公开的结构构件以及其结构等效物)实施,或在其组合中实施。可将本发明的实施例实施为一个或多个计算机程序产品,即,有形地体现在非暂时性机器可读存储介质中的一个或多个计算机程序,以用于由数据处理设备(例如,可编程处理器、计算机、或多个处理器或计算机)执行或用于控制所述数据处理设备的操作。
118.相对定位的术语用于表示系统的部件相对于彼此的定位,而不一定是关于重力;应理解,可将抛光表面和基板固持在垂直取向或一些其他取向上。
119.已描述了诸多实施方式。然而,将理解,可作出各种修改。例如:
·
可使用对整个基板成像的相机,而不是线扫描相机。在此情形下,不需要相机相对于基板的运动。
·
相机可覆盖小于基板的整个宽度。在此情形下,相机需要在两个垂直方向上进行运动(例如,被支撑在x
‑
y台上),以便扫描整个基板。
·
光源可照亮整个基板。在此情形下,光源不需要相对于基板移动。
·
尽管以上讨论了在二维坐标空间中由值对表示的坐标,但所述技术适用于具有由三个或更多个色彩通道定义的三个或更多个维度的坐标空间。
·
传感器组件不需要定位在抛光站之间或抛光站与传送站之间的内嵌系统。例如,传感器组件可定位在传送站内,定位在盒式接口单元中,或是独立的系统。
·
均匀性分析步骤是可选的。例如,可将通过应用阈值变换来产生的图像馈送到前馈过程中以调整对基板的稍后的处理步骤,或馈送到反馈过程中以调整对后续基板的处理步骤。
·
对于原位测量而言,不是构造图像,而是监测系统可简单地检测从基板上的光斑反射的白光束的色彩,并使用此色彩数据以使用上述技术来确定在此光斑处的厚度。
·
尽管描述聚焦于抛光,但所述技术可应用于添加或去除层并可进行光学监测的
其他种类的半导体制造工艺,诸如,蚀刻(例如,湿式或干式蚀刻)、沉积(例如,化学气相沉积(cvd)、物理气相沉积(pvd)或原子层沉积(ald))、旋涂电介质、或光刻胶涂层。
120.因此,其他实施方式在权利要求书的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。