1.本实用新型涉及机械制造领域,具体涉及一种基于专家系统的师徒式智能研抛机。
背景技术:
2.现代精密加工的趋势是自动化、大批量加工,以提高精密加工的生产效率,从而快速高效地完成各种复杂的精密加工工序。但是对于一些特殊零部件的部分工序还是需要高水平技术人员进行手动加工(例如研抛)。传统上对于特殊零部件表面的研磨和抛光需要具有丰富经验的高水平技术人员才能完成,入门期的学徒需要经历较长时间的学习以积累经验,且初期会造成较多不必要的资源损耗。
技术实现要素:
3.为了解决上述问题,本实用新型提出了一种能够快速上手,减少资源浪费并提高人才培养效率的基于专家系统的师徒式智能研抛机。
4.为了实现上述目的,本实用新型是通过以下技术方案来实现的:
5.一种基于专家系统的师徒式智能研抛机包括研抛机、控制板、传感器组以及人机交互装置;所述控制板、传感器组与人机交互装置搭载于所述研抛机上;还包括专家系统、师傅端系统以及学徒端系统;
6.所述专家系统包括无线通讯模块、存储模块和数据处理模块;所述专家系统运行在所述控制板或人机交互装置上;
7.所述控制板上还包括数据采集模块、储存模块、通讯模块和报警模块;
8.所述师傅端系统包括数据采集模块、储存模块和通讯模块;所述师傅端系统运行在所述控制板上;
9.所述学徒端系统包括数据采集模块、储存模块、通讯模块和报警模块;所述学徒端系统运行在所述控制板上;
10.所述控制板通过所述通讯模块与专家系统中的存储模块和数据处理模块连接;专家系统中的储存模块与所述数据处理模块连接;所述控制板还与所述数据采集模块和报警模块信号连接;
11.所述传感器组与所述数据采集模块的输入端信号连接。
12.进一步的,所述传感器组包括有力传感器、温度传感器和和转速传感器;所述力传感器、温度传感器和转速传感器分别与控制板连接,并通过有线通讯的方式与控制板进行数据传输。
13.进一步的,所述报警模块为声觉、视觉提醒和警报中的至少一种。声觉如报警铃,视觉提醒如闪烁灯,警报如振动提醒。
14.进一步的,所述研抛机包括壳体,设置在所述壳体内部且用于产生振动,旋转或特定轨迹运动的电机总成,设置在壳体外部且与电机总成连接的传动末端,与所述传动末端
连接的执行末端;所述力传感器和温度传感器嵌入至所述执行末端内。
15.进一步的,电机总成包括:电源模块,用于提供转动动力的直流电机,用于产生振动、旋转或特定轨迹运动的偏心轮,轴承和导向块;所述直流电机的转轴依次穿过所述偏心轮、轴承和导向块;所述导向块的两端固定在所述壳体的内表面,所述导向块的中心设有用于直流电机的转轴穿过的固定孔,所述导向块的固定孔两侧设有用于与传动末端连接的卡槽,所述传动末端卡接在所述卡槽上并在所述卡槽内上下或左右单一方向运行。
16.进一步的,在执行末端的底部中心和平面上均设有凹槽,力传感器嵌入至底部中心的凹槽上;所述温度传感器嵌入至底部平面上的凹槽。
17.进一步的,所述力传感器与执行末端的轴向刚性连接。
18.进一步的,所述电机总成与所述控制板电性连接,所述转速传感器通过数据采集模块与所述控制板信号连接;所述转速传感器对电机总成内的直流电机转速进行采集,并通过控制板对电机进行开关和调速控制。
19.本实用新型基于专家系统的师徒式智能研抛机,其有益效果在于:
20.(1)智能研抛机有两种工作状态,当研抛机处于师傅状态时,控制板运行使传感器组获取压力、温度、转速等工艺信息并将工艺信息传输至控制板,控制板将工艺信息以无线通讯的方式传输至存储模块进行储存;当研抛机处于学徒状态时,控制板运行使传感器组实时获取工艺信息并将所述工艺信息传输至控制板,控制板将信息发送至储存模块和数据处理模块中进行数据分析和比对,控制板根据比对结果使报警模块做出反应,通过声觉或视觉提醒、警报的方式对学徒进行个性化指导与纠正;最终实现类似于直观知识传递的智能化引导操作,从而极大地加快学习过程和降低成本。
21.(2)控制板通过4g通讯方式与储存模块和数据处理模块之间进行数据传输,传输范围广、传输条件要求低;专家系统可以部署在控制板或其他终端设备上;终端设备可以异地部署,具有高适应性,提高实施效率的同时降低整体成本。
附图说明
22.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
23.图1是本实用新型的结构示意图;
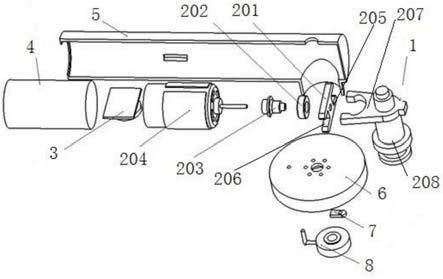
24.图2是本实用新型的爆炸结构图;
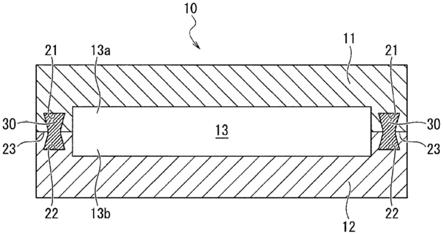
25.图3是本实用新型的剖面结构示意图;
26.图4是执行末端的结构示意图;
27.图5是本实用新型的控制模块示意图;
28.1传动末端,2电机总成,3控制板,4电源模块,5壳体,6执行末端,7 温度传感器,8力传感器;
29.201导向块,202轴承,203偏心轮,204直流电机,205固定孔,206卡槽, 207卡件,208固定座。
具体实施方式
30.下面结合具体实施例及附图来进一步详细说明本实用新型。
31.实施例1
32.一种基于专家系统的师徒式智能研抛机,如图5所示,包括硬件系统和软件系统;所述硬件系统包括研抛机、控制板、传感器组以及人机交互装置;所述控制板、传感器组与人机交互装置搭载于所述研抛机上;
33.人机交互装置可为终端设备,如电脑、手机、ipad和其他触屏终端等。
34.所述专家系统包括无线通讯模块、存储模块和数据处理模块;所述专家系统运行在所述控制板或人机交互装置上;
35.所述控制板上还包括数据采集模块、储存模块、通讯模块和报警模块;
36.所述师傅端系统包括数据采集模块、储存模块和通讯模块;所述师傅端系统运行在所述控制板上;
37.所述学徒端系统包括数据采集模块、储存模块、通讯模块和报警模块;所述学徒端系统运行在所述控制板上;
38.所述控制板通过所述通讯模块与专家系统中的存储模块和数据处理模块连接;专家系统中的储存模块与所述数据处理模块连接;所述控制板还与所述数据采集模块和报警模块信号连接;
39.所述传感器组与所述数据采集模块的输入端信号连接。
40.本实施例中,所述专家系统包括无线通讯模块、存储模块和数据处理模块,可运行在所述控制板或其他终端设备上;所述储存模块和数据处理模块通过无线通讯模块与所述控制板进行数据传输与专家系统传输;获取的数据存储在专家系统的存储模块中,并通过专家系统中的数据处理模块对数据进行储存、分析和比对,从而得出具有特定规则与逻辑的专家系统。
41.专家系统可以运行在控制板3或终端设备作为载体进行储存。而专家系统可为现有常规的较成熟的机械工艺专家系统,通过收集专家数据,再经过特定的算法进行分析和对比。如maproplan系统,mppest
‑
2系统,capi系统,pro/capm 系统等。
42.本实施例中,传感器组包括有力传感器、温度传感器和和转速传感器;所述力传感器、温度传感器和转速传感器分别与控制板连接,并通过有线通讯的方式与控制板进行数据传输。
43.本实施例中,所述师傅端系统包括数据采集模块、储存模块和通讯模块;所述师傅端系统运行在所述控制板上;学徒端系统包括数据采集模块、储存模块、通讯模块和报警模块;师傅端系统和学徒端系统均设置在控制板上。
44.本实施例中,师傅端系统通过数据采集模块对研抛机工作状态的工艺数据进行采集,并通过所述控制板进行数据传输至所述专家系统中。
45.本实施例中,学徒端系统通过数据采集模块对研抛机工作状态的工艺数据采集,并通过所述控制板进行数据传输至所述专家系统中;
46.所述专家系统通过数据分析和比对后通过数据传输至控制板;所述控制板控制所述学徒端系统中的报警模块进行报警纠错。报警模块为声觉,或视觉提醒,或警报。其中声觉如报警铃,视觉提醒如闪烁灯,警报如振动提醒等,这些报警设备均与控制板进行连接,
由控制板通过专家系统数据对比的反馈,对学徒的操作进行提醒和纠错。
47.师傅端系统和所述学徒端系统中的数据采集模块用于对研抛机工作状态中的传输压力、温度、转速、操作时间的阈值、均值和范围进行采集。
48.在本实施例中,师傅系统和学徒系统可搭载在同一个研抛机中,也可分别搭载在不同的研抛机中,师傅系统和学徒系统均连接在控制板上,通过控制板的指定进行师傅系统或学徒系统的运行。
49.实施例2
50.一种基于专家系统的师徒式智能研抛机,如图1
‑
4所示研抛机包括壳体5、设置在壳体5内部且用于产生振动的电机总成2、设置在壳体5外部且与电机总成2连接的传动末端1、与传动末端1连接的执行末端6、设置在执行末端6下方的打磨片和设置在壳体5上的控制板3;
51.其中,电机总成2包括:电源模块4、用于提供转动动力的直流电机204、用于产生振动的偏心轮203、轴承202和导向块201;直流电机204的转轴依次穿过偏心轮203、轴承202和导向块201;导向块201的两端固定在壳体5的内表面,导向块201的中心设有用于直流电机204的转轴穿过的固定孔205,导向块201的固定孔205两侧设有用于与传动末端1连接的卡槽206;
52.其中,传动末端1包括卡件207和固定座208,固定座208的上部固定在卡件207的一端,卡件207的另一端与导向块201中的卡槽206配合卡接;固定座208的下部与执行末端6竖直轴向连接;
53.其中,执行末端6为圆盘固定座208,执行末端6上嵌入式设有力传感器和温度传感器7;力传感器与执行末端6的轴向刚性连接;温度传感器7和力传感器8与控制板3通过信号线信号连接;直流电机204与控制板3电性连接;在执行末端6的底部中心设有凹槽,力传感器包括固定环和连接固定环上的力传感器8,固定环套设在执行末端6的轴向上,力传感器8与执行末端6底部的凹槽表面接触连接。将作用在传动末端1上的压力传送至控制板3中进行记录、储存,并将数据通过有线信号传输至专家系统中进行储存和分析。本实施例中的执行末端6为打磨头。
54.本实施例中,卡件207为u型卡件207,卡件207包括u型端和两个开口端;u型端与固定座208连接,两个开口端分别对应插入至导向块201的卡槽206内。卡槽206的上下宽度稍大于卡件207的厚度,能够使卡件207在导向块201的卡槽206内上下运行。
55.本实施例中,传动末端1:作用是将电机产生的振动传递到执行末端6上,从而实现执行末端6的振动,同时提供执行末端6安装孔位,用于执行末端6 安装。
56.电机总成2的作用是产生振动。其中直流电机204主要提供转动动力。偏心轮203的作用是将电机输出轴的回转运动转换为振动。轴承202的作用是用于固定电机总成2,外侧与壳体5相连,保证电机转动平稳并减少振动向壳体5 传递。导向块201的作用是用于固定电机总成2,两侧与壳体5相连,改变振动方向,保证执行末端6仅产生单一方向的振动。电池的作用是提供电能。执行末端6是振动的最终输出端,是打磨片的装配基体。
57.温度传感器7为热电阻型温度传感器7,用于采集研抛时的温度数据。力传感器8是用于采集研抛时的轴向力数据。
58.实施例3
59.一种基于专家系统的师徒式智能研抛机,如图5所示,研抛机有两种工作状态,分别为师傅状态与学徒状态;当所述研抛机处于所述师傅状态时,所述控制板运行所述师傅端系统与之匹配,所述传感器组获取工艺信息并将所述工艺信息传输至所述控制板,所述控制板将所述工艺信息以无线通讯的方式传输至所述专家系统;当所述研抛机处于所述学徒状态时,所述控制板运行所述学徒端系统与之匹配,所述传感器组实时获取工艺信息并将所述工艺信息传输至所述控制板,所述控制板将所述工艺信息与所述专家系统进行比对,所述控制板根据比对结果对所述人机交互装置进行控制,所述人机交互装置通过声觉或视觉提醒、警报的方式对学徒进行指导与纠正。
60.在研磨和抛光过程中,当研抛机处于师傅状态时,研抛机通过传感器组实时获取高水平技术人员加工时的各种工艺信息(轴向压力、工作面温度、转速等数据)并传输至控制板3中;控制板3将获取的大量工艺数据传输至运行在控制板3或其他终端设备上的专家系统。
61.专家系统接收数据后,对数据进行储存、预处理和分析,挖掘出数据中包含的重要工艺操作信息,包括力、温度、转速、操作时间的阈值、均值和范围等;从而以工艺数据库的形式重现了专家进行加工时的专业知识与经验,最终构建出专家系统数据库;专家系统数据库构建完成后,运行在控制板3或其他终端设备上的专家系统便将其内的数据、规则、逻辑库传输至控制板3,并长期存储。
62.在研磨和抛光过程中,当研抛机处于学徒状态时,学徒通过师徒式智能研抛机进行加工的同时研抛机也通过传感器组实时获取并记录学徒加工时的各种工艺信息(轴向压力、工作面温度、转速等数据),并将其与师徒式智能研抛机控制板中存储的专家系统数据库中的工艺数据进行对比,当学徒的加工数据与专家系统数据库的不匹配程度超出阈值时,通过显示屏、蜂鸣器或其他警示模块等人机交互装置对学徒进行动作纠偏和操作指导,有针对性地及时纠正错误。
63.其中报警模块做出的提示包括但不仅限于语音提示,响铃提示,振动提示,指示灯提示等进行纠错,还可进行电源控制和调速等。
64.语音提示中的控制模块包括语音播放模块和语音接收模块。与控制板的输入和输出端信号连接,主要用于播放控制系统中出现的错误警告或分析,也可播放通过无线通讯模块接收的远程语音信息等。
65.储存模块:与控制板连接,主要储存通过力传感器8和温度传感器7采集的研抛时的压力、轴向力和温度等,同时采集设备的运行时间、转速、均值、范围和设定的阈值等。还可储存通过无线通讯模块传入的或外部输入的数值。
66.数据处理模块:主要用于多采集和外部输入和接收的数值进行处理,在学员在操作过程中对操作参数进行与储存模块中的数据库进行对比,以便做出反应,并将信号传送给控制板,使控制板做出反应指令。
67.无线通讯模块:与控制板连接,接收专家系统发出的信号,并传送给控制板,使控制板做出操作指令。还可将控制板接收的信号发送至专家系统,便于专家系统的储存和分析,完善数据库。
68.报警模块:可包括报警指示灯,或语音报警,或报警铃报警,或振动报警。在操作过程中使用的力度和表面接触温度,以及其他转速、运行时间等参数超过设定的阈值时,可控
制板控制报警模块运行,做出报警,提醒操作人员。可使学员意识到问题,减少练习材料的浪费。
69.调速开关:主要用于对直流电机204的转速进行手动调整的开关,通过控制板与直流电机204电性连接。
70.另外,本方法不仅适用于研抛工序,在稍加改造后也适用于各种工序工艺数据的提取、分析与传承;且此方法构建的工艺数据库(专家系统)不仅可用于新进技术人员的指导培训,亦可以移植用于机器人浮动研抛加工,还可以用作相关工序知识与数据驱动的计算机辅助工艺创新(capi)基础。
71.以上对本实用新型实施例所提供的技术方案进行了详细介绍,本文中应用了具体个例对本实用新型实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本实用新型实施例的原理;同时,对于本领域的一般技术人员,依据本实用新型实施例,在具体实施方式以及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。