1.本实用新型属于水陆两栖机器人技术领域,具体为一种基于异型辐条的腿式水路两栖机器人。
背景技术:
2.两栖机器人具有在水上和陆地运动的能力,能够在水陆交界地带实现两栖切换运动,可以执行水陆两种环境的任务,例如可以承担海洋资源勘探和海洋环境监测,也可以在海洋与陆地交界的过渡地带进行军事侦察任务,因此两栖机器人对于环境监测和军事侦察等方面具有重大意义。
3.现有的两栖机器人主要分为轮式两栖机器人、蛇形两栖机器人和腿式两栖机器人等,轮式两栖机器人的越障能力差,蛇形两栖机器人的结构复杂,腿式两栖机器人的平稳性较差。此外,现有的两栖机器人将陆地运动和水上运动分离开,分别用一套驱动和执行机构使机器人在不同的工作环境中运动,在水陆变换时机器人结构同时需要变换,使机器人结构复杂,运动效率低下。
技术实现要素:
4.针对现有技术的不足,本实用新型拟解决的技术问题是,提供一种基于异型辐条的腿式水陆两栖机器人。
5.为了解决上述技术问题,本实用新型采用的技术方案如下:
6.一种基于异型辐条的腿式水路两栖机器人,包括底盘、前足、后足、转向机构和传动机构;传动机构分别与前足和后足连接,转向机构与前足连接;底盘的底部设有充气气垫;其中,前足和后足均包括两个异型辐条腿,每条异型辐条腿均包括连接座、异型辐条、足端和异型桨叶;连接座的四周边缘呈圆周均匀设置有多条呈伞型的异型辐条,即异型辐条与机器人高度方向具有一定夹角;每个异型辐条的末端均连接有弧形长条状的足端;每个异型辐条的两侧对称设置有异型桨叶,异型桨叶沿背离异型辐条腿中心的方向宽度逐渐增加,异型桨叶的叶面呈弧形向机器人后方延伸。
7.进一步的,所述异型辐条腿包括三条异型辐条,相邻异型辐条之间的夹角为120
°
;安装时,同足的两个异型辐条腿的异型辐条错开60
°
夹角,位于底盘对角线上的两个异型辐条腿的异型辐条安装角度相同。
8.进一步的,所述异型辐条与机器人高度方向的夹角为10~15
°
。
9.进一步的,所述传动机构包括直流减速电机、主动直齿圆柱齿轮、从动直齿圆柱齿轮、一号锥齿轮、二号锥齿轮、传动轴、联动轴和万向节;两个传动轴分别位于底盘的前、后端,底盘前端的传动轴两端分别通过万向节与前足的两个异型辐条腿连接,底盘后端的传动轴两端分别与后足的两个异型辐条腿转动连接;直流减速电机安装在底盘的后部,主动直齿圆柱齿轮位于直流减速电机的输出轴上,从动直齿圆柱齿轮位于底盘后端的传动轴上,从动直齿圆柱齿轮与主动直齿圆柱齿轮啮合;联动轴的前、后端分别安装有二号锥齿
轮,每个二号锥齿轮与对应的一号锥齿轮啮合,位于联动轴前端的一号锥齿轮安装在底盘前端的传动轴上,位于联动轴后端的一号锥齿轮安装在底盘后端的传动轴上。
10.进一步的,所述转向机构包括舵机、短连杆、长连杆、转向连接座和套筒;两个转向连接座分别套装在两个万向节上,转向连接座的一端与对应的异型辐条腿连接,转向连接座的外表面沿水平方向延伸出一个端耳;套筒两端的上、下部分别设有端耳,套筒套装在底盘前端的传动轴上且不干涉传动轴转动,套筒两端的端耳通过一号销轴与对应的转向连接座转动连接;舵机与底盘连接,舵机的输出轴通过二号销轴与短连杆的一端铰接,短连杆的另一端固定有三号销轴,长连杆的一端和位于前足左侧的转向连接座的端耳均与三号销轴转动连接,长连杆的另一端通过四号销轴与位于前足右侧的转向连接座的端耳转动连接;长连杆、位于前足左侧的转向连接座与长连杆和套筒的两个连接点之间的部分、位于前足右侧的转向连接座与长连杆和套筒的两个连接点之间的部分、以及套筒与两个转向连接座的连接点之间部分共同构成了平行四边形,通过平行四边形的变形实现机器人转向。
11.与现有技术相比,本实用新型的有益效果是:
12.1、本实用新型在陆地和水上运动均通过传动机构驱动前足和后足实现,两个环境中的运动不需要额外的切换结构,使整个机器人结构简单紧凑;在陆地运动时,通过异型辐条腿的足端站立在地面上;在水上运动时,传动机构带动异型辐条腿旋转,异型辐条腿上的异型桨叶向后拨水,异型辐条腿类似船帆的明轮,利用异型桨叶提供动力,因此该机器人能够适用于陆地、水上以及水陆交界处的环境。
13.2、由于每个异型辐条腿设有三根异型辐条,相邻异型辐条的夹角为120度,相邻足端之间具有间隙,因此异型辐条腿可以跨越小尺度障碍物,使得机器人具有一定的越障能力。机器人上可以搭载例如摄像头、传感器等设备,使机器人执行监测、侦察、勘探等任务。
附图说明
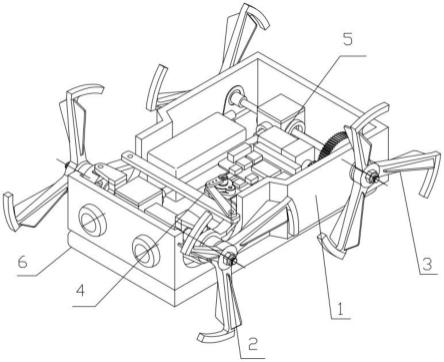
14.图1为本实用新型的整体结构示意图;
15.图2为本实用新型的底盘去除上盖的结构示意图;
16.图3为本实用新型的异型辐条腿的结构示意图;
17.图4为本实用新型的右视图;
18.图5为本实用新型的传动机构与前、后足的连接示意图;
19.图6为本实用新型的转向机构与前足的连接示意图;
20.图中:1-底盘;2-前足;3-后足;4-转向机构;5-传动机构;6-充气气垫;
21.201-连接座;202-异型辐条;203-足端;204-异型桨叶;401-舵机;402-短连杆;403-长连杆;404-转向连接座;405-套筒;501-直流减速电机;502-主动直齿圆柱齿轮;503-从动直齿圆柱齿轮;504-一号锥齿轮;505-二号锥齿轮;506-传动轴;507-联动轴;508-万向节。
具体实施方式
22.下面结合附图和具体实施方式对本实用新型的技术方案进行详细描述,但并不以此限定本技术的保护范围。
23.本实用新型为一种基于异型辐条的腿式水路两栖机器人(简称机器人,参见图1~
6),包括底盘1、前足2、后足3、转向机构4和传动机构5;
24.其中,前足2和后足3分别位于底盘1的前端和后端,传动机构5安装在底盘1上,分别与前足2和后足3连接;转向机构4位于底盘1的中部,且与前足2连接;底盘1的底部设有充气气垫6,机器人在水中运动时,通过充气气垫6提供浮力。
25.所述前足2和后足3均包括两个异型辐条腿,每条异型辐条腿均包括连接座201、异型辐条202、足端203和异型桨叶204;连接座201的四周边缘呈圆周均匀设置有三个异型辐条202,异型辐条202呈伞型,与机器人高度方向呈一定夹角,即异型辐条202外翻10~15
°
;每个异型辐条202的末端均连接有足端203,足端203呈弧形长条状,有利于增大与地面的接触面积;每个异型辐条202的两侧对称设置有异型桨叶204,异型桨叶204的一侧与异型辐条202连接,异型桨叶204沿背离异型辐条腿中心的方向宽度逐渐增加,可增大与水面的接触面积,为机器人提供更大的动力;异型桨叶204的叶面呈弧形向后(水中前进的反方向)延伸,有利于拨水。安装时,同足的两个异型辐条腿的异型辐条202错开60
°
夹角,位于底盘1对角线上的两个异型辐条腿的异型辐条202安装角度相同,使机器人的前、后足均与地面有足够的接触面积,保证机器人具有良好的稳定性。当机器人在陆地运动时,足端203接触地面,由于足端203具有一定宽度,使机器人更加稳定;异型辐条腿的长度为底盘1高度的1.5倍,异型辐条202的长度较长,且相邻两个异型辐条202之间存在120
°
夹角,相邻足端203之间存在间隙,因此异型辐条腿可以跨越小尺度障碍物,使得机器人具有一定的越障能力。当机器人在水中前进时,异型辐条腿旋转,使异型桨叶204向后波水,异型桨叶204保证异型辐条腿在水中转动时起到类似明轮的作用,驱动机器人在水面上行进。
26.如图5所示,传动机构5包括直流减速电机501、主动直齿圆柱齿轮502、从动直齿圆柱齿轮503、一号锥齿轮504、二号锥齿轮505、传动轴506、联动轴507和万向节508;两个传动轴506分别位于底盘1的前、后端,底盘1前端的传动轴506两端分别通过万向节508与前足2的两个异型辐条腿连接,由于万向节的存在,可以保证机器人在前进运动的同时实现转向,底盘1后端的传动轴506两端分别通过轴承与后足3的两个异型辐条腿转动连接;直流减速电机501固定安装在底盘1的后部,主动直齿圆柱齿轮502固定在直流减速电机501的输出轴上,从动直齿圆柱齿轮503固定在底盘1后端的传动轴506上,从动直齿圆柱齿轮503与主动直齿圆柱齿轮502啮合;联动轴507的前、后端分别安装有二号锥齿轮505,每个二号锥齿轮505与对应的一号锥齿轮504啮合,位于联动轴507前端的一号锥齿轮504固定安装在底盘1前端的传动轴506上,位于联动轴506后端的一号锥齿轮504固定安装在底盘1后端的传动轴506上;直流减速电机501带动主动直齿圆柱齿轮502转动,主动直齿圆柱齿轮502通过从动直齿圆柱齿轮503带动底盘1后端的传动轴506转动,底盘1后端的传动轴506通过齿轮啮合和联动轴507将动力传递至底盘1前端的传动轴506,使两个传动轴506同步转动,进而使前足2和后足3转动,实现机器人的行走运动。
27.如图6所示,所述转向机构4包括舵机401、短连杆402、长连杆403、转向连接座404和套筒405;两个转向连接座404分别套装在两个万向节508上,转向连接座404的一端与对应的异型辐条腿螺纹连接,转向连接座404的外表面沿水平方向延伸出一个端耳;套筒405两端的上、下部分别设有端耳,套筒405套装在底盘1前端的传动轴506上且不干涉传动轴506转动,套筒405两端的端耳通过一号销轴与对应的转向连接座404转动连接;舵机401与底盘1固定连接,舵机401的输出轴通过二号销轴与短连杆402的一端铰接,短连杆402的另
一端固定有三号销轴,长连杆403的一端和位于前足左侧的转向连接座404的端耳均与三号销轴转动连接,长连杆403的另一端通过四号销轴与位于前足右侧的转向连接座404的端耳转动连接;长连杆403、位于前足左侧的转向连接座404与长连杆403和套筒405的两个连接点之间的部分、位于前足右侧的转向连接座404与长连杆403和套筒405的两个连接点之间的部分、以及套筒405与两个转向连接座404的连接点之间部分共同构成了平行四边形;通过舵机401带动短连杆402转动,使长连杆403和位于前足左侧的转向连接轴404相对于三号销轴转动,进而使平行四边形变形实现前足偏转,进而实现机器人的转向。
28.本实用新型的工作原理和工作流程为:
29.在陆地运动和水上运动均通过传动机构实现;启动直流减速电机501,使主动直齿圆柱齿轮502转动,带动底盘1后端的传动轴506转动,使传动轴506上的一号锥齿轮504转动,并通过齿轮传动使底盘1前端的传动轴506同步转动,实现机器人的行走;需要转向时,启动舵机401,带动短连杆402转动,使长连杆403和位于前足左侧的转向连接座404相对于三号销轴转动,进而使平行四边形变形实现前足2偏转,进而实现机器人的转向。机器人在陆地运动时,异型辐条腿通过足端203与地面接触,为机器人提供支撑;在水上运动时,利用充气气垫6提供浮力,通过直流减速电机501带动异型辐条腿转动,异型辐条腿转动过程中通过异型桨叶204向后拨水,异型桨叶204起到类似明轮的作用,驱动机器人在水中前进。
30.机器人上可以搭载例如摄像头、传感器等设备,使机器人执行监测、侦察、勘探等任务。
31.本实用新型未述及之处适用于现有技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。