技术特征:
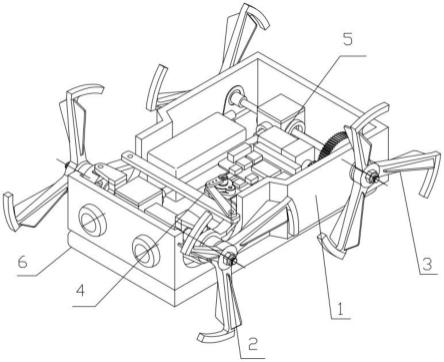
1.一种基于异型辐条的腿式水路两栖机器人,包括底盘、前足、后足、转向机构和传动机构;传动机构分别与前足和后足连接,转向机构与前足连接;底盘的底部设有充气气垫;其特征在于,所述前足和后足均包括两个异型辐条腿,每条异型辐条腿均包括连接座、异型辐条、足端和异型桨叶;连接座的四周边缘呈圆周均匀设置有多条呈伞型的异型辐条,即异型辐条与机器人高度方向具有一定夹角;每个异型辐条的末端均连接有弧形长条状的足端;每个异型辐条的两侧对称设置有异型桨叶,异型桨叶沿背离异型辐条腿中心的方向宽度逐渐增加,异型桨叶的叶面呈弧形向机器人后方延伸。2.根据权利要求1所述的基于异型辐条的腿式水路两栖机器人,其特征在于,所述异型辐条腿包括三条异型辐条,相邻异型辐条之间的夹角为120
°
;安装时,同足的两个异型辐条腿的异型辐条错开60
°
夹角,位于底盘对角线上的两个异型辐条腿的异型辐条安装角度相同。3.根据权利要求1或2所述的基于异型辐条的腿式水路两栖机器人,其特征在于,所述异型辐条与机器人高度方向的夹角为10~15
°
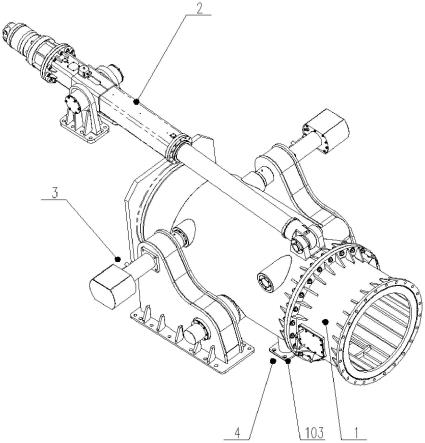
。4.根据权利要求1所述的基于异型辐条的腿式水路两栖机器人,其特征在于,所述传动机构包括直流减速电机、主动直齿圆柱齿轮、从动直齿圆柱齿轮、一号锥齿轮、二号锥齿轮、传动轴、联动轴和万向节;两个传动轴分别位于底盘的前、后端,底盘前端的传动轴两端分别通过万向节与前足的两个异型辐条腿连接,底盘后端的传动轴两端分别与后足的两个异型辐条腿转动连接;直流减速电机安装在底盘的后部,主动直齿圆柱齿轮位于直流减速电机的输出轴上,从动直齿圆柱齿轮位于底盘后端的传动轴上,从动直齿圆柱齿轮与主动直齿圆柱齿轮啮合;联动轴的前、后端分别安装有二号锥齿轮,每个二号锥齿轮与对应的一号锥齿轮啮合,位于联动轴前端的一号锥齿轮安装在底盘前端的传动轴上,位于联动轴后端的一号锥齿轮安装在底盘后端的传动轴上。5.根据权利要求1或4所述的基于异型辐条的腿式水路两栖机器人,其特征在于,所述转向机构包括舵机、短连杆、长连杆、转向连接座和套筒;两个转向连接座分别套装在两个万向节上,转向连接座的一端与对应的异型辐条腿连接,转向连接座的外表面沿水平方向延伸出一个端耳;套筒两端的上、下部分别设有端耳,套筒套装在底盘前端的传动轴上且不干涉传动轴转动,套筒两端的端耳通过一号销轴与对应的转向连接座转动连接;舵机与底盘连接,舵机的输出轴通过二号销轴与短连杆的一端铰接,短连杆的另一端固定有三号销轴,长连杆的一端和位于前足左侧的转向连接座的端耳均与三号销轴转动连接,长连杆的另一端通过四号销轴与位于前足右侧的转向连接座的端耳转动连接;长连杆、位于前足左侧的转向连接座与长连杆和套筒的两个连接点之间的部分、位于前足右侧的转向连接座与长连杆和套筒的两个连接点之间的部分、以及套筒与两个转向连接座的连接点之间部分共同构成了平行四边形,通过平行四边形的变形实现机器人转向。
技术总结
本实用新型为基于异型辐条的腿式水路两栖机器人,包括底盘、前足、后足、转向机构和传动机构;传动机构分别与前足和后足连接,转向机构与前足连接;底盘的底部设有充气气垫;其中,前足和后足均包括两个异型辐条腿,每条异型辐条腿均包括连接座、异型辐条、足端和异型桨叶;连接座的四周边缘呈圆周均匀设置有多条呈伞型的异型辐条,即异型辐条与机器人高度方向具有一定夹角;每个异型辐条的末端均连接有弧形长条状的足端;每个异型辐条的两侧对称设置有异型桨叶,异型桨叶沿背离异型辐条腿中心的方向宽度逐渐增加,异型桨叶的叶面呈弧形向机器人后方延伸。在陆地和水上运动均通过传动机构驱动前足和后足实现,两个环境中的运动不需要额外的切换结构,机器人结构简单紧凑。机器人结构简单紧凑。机器人结构简单紧凑。
技术研发人员:武毅男 邓皓月 方勇纯 白一凡
受保护的技术使用者:南开大学
技术研发日:2022.10.27
技术公布日:2022/12/23
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。