1.本发明属于压水反应堆换料检修操作技术领域,具体涉及一种辐照监督管拆卸工具。
背景技术:
2.为了检测辐照环境对核电站压水堆压力容器材料性能的影响情况,在反应堆内设置了辐照监督管。辐照监督管是安装在反应堆压力容器下部的用于材料性能监督的部件。在定期进行反应堆换料检修时,操作人员将从压力容器中取出辐照监督管,并对其性能进行检验和测试,确定相关材料的性能变化,为反应堆压力容器安全评估提供参数,以此监测压力容器材料的脆化情况。
3.在反应堆换料检修时,由于压力容器和辐照监督管存在强烈的放射性,因此需要利用拆卸工具在压力容器底部对辐照监督管进行水下远程拆装。在一般压水堆型中,辐照监督管安装方向正对压力容器上方的堵塞孔,只需通过相应的长杆操作工具从上往下对辐照监督管进行拆卸操作,从而实现辐照监督管的拆卸。但在一些新压水堆堆型中,辐照监督管安装位置正上方存在遮挡物,操作空间狭窄,不能直接利用长杆操作工具进行拆卸。因此,如文献《核电厂新型抓取工具的设计与应用》(期刊论文,机械研究与应用,2018)、文献《一种辐照监督管远程抓具》(专利,cn109949954a)提出的操作工具已不能满足相应工况。
技术实现要素:
4.有鉴于此,针对一些新压水堆堆型中,辐照监督管安装位置正上方存在遮挡物,操作空间狭窄的工况,本发明提供一种悬臂式辐照监督管脱扣装置及工作方法,目的在于,用于在上述工况条件下对辐照监督管进行水下远程脱扣。
5.本发明通过下述技术方案实现:
6.一种悬臂式辐照监督管脱扣装置,包括推力组件、旋转组件和导向组件,导向组件包括三角形操作杆,推力组件包括水平滑块、竖直滑块、支撑架、直线气缸;直线气缸推杆与水平滑块连接,竖直滑块底部与三角形支撑杆连接,竖直滑块与水平滑块之间通过斜面滑动连接,将直线气缸水平推力转换为三角形操作杆竖直向下运动;推力组件通过支撑架与旋转组件连接,水平滑块斜面侧边线处倒圆角,将旋转组件旋转力转换为三角形操作杆轴向转动。
7.作为优选方案,旋转组件包括摆动气缸、连杆机构、连接板、底板、导向杆、盖板,摆动气缸主体安装在底板上,导向杆竖直安装在底板上,连接板上开设有弧形孔,导向杆位于弧形孔中,盖板安装在导向杆顶端且位于连接板上方,摆动气缸输出轴通过连杆机构与连接板侧边连接。
8.作为优选方案,推力组件还包括滑槽、铰链,直线气缸主体安装在滑槽内,水平滑块在滑槽内滑动连接,直线气缸推杆与水平滑块通过铰链连接,支撑架顶部与滑槽底部连接,支撑架底部连接在旋转组件的连接板上。
9.作为优选方案,导向组件还包括导向筒、导向弹簧、相机,导向筒连接在旋转组件的连接板上,三角形操作杆限位于导向筒中竖直滑动,导向弹簧用于提供三角形操作杆向上的恢复力,相机安装在导向筒上且正对三角形操作杆底端。
10.作为优选方案,还包括堆上定位装置和连接杆组件,连接杆组件包括连接杆,旋转组件的底板连接在连接杆底端,连接杆顶端连接在堆上定位装置上。
11.作为优选方案,堆上定位装置包括底座、吊耳、x向导轨、滑台、连接杆支撑平台、电机、数字显示器、挡块、y向导轨,吊耳安装在底座上部,x向导轨安装在底座下部,滑台安装在x向导轨上,y向导轨安装在滑台上,连接杆支撑平台安装在y向导轨上,连接杆顶端连接在连接杆支撑平台上,x向导轨和y向导轨配置电机和挡块,数字显示器用于显示x向和y向位移。
12.作为优选方案,连接杆组件还包括连接杆操作手柄,连接杆通过连接杆操作手柄安装在连接杆支撑平台上。
13.作为优选方案,还包括配重组件,配重组件包括连接接口、配重块和调节螺母,配重块通过连接接口安装在连接杆组件的连接杆底部,且配重块与由推力组件、旋转组件和导向组件组成的脱扣组件位于连接杆相对两侧,配重块两侧通过调节螺母调整水平配重位置。
14.作为优选方案,还包括水下摄像机,水下摄像机正对脱扣组件,且与控制系统信号连接。
15.上述的悬臂式辐照监督管脱扣装置的工作方法,实施如下步骤:
16.1)安装堆上定位装置;
17.2)安装连接杆组件及下部由推力组件、旋转组件和导向组件组成的脱扣组件;
18.3)调节连接杆操作手柄进行方向粗定位;
19.4)通过水下摄像机进行位置粗定位;
20.5)启动相机并解析位移量;
21.6)读取位移量并进行位置精定位;
22.7)开启直线气缸电磁开关;
23.8)水下摄像机监视到位情况;
24.9)开启摆动气缸电磁开关;
25.10)水下摄像机监视到位情况;
26.11)完成脱扣动作;
27.12)依次关闭直线气缸和摆动气缸的电磁开关;
28.13)脱扣装置退出。
29.综上所述,本发明与现有技术常规辐照监督管拆卸工具相比,具有以下不同之处以及优点和有益效果:
30.1)本发明采用了全新的悬臂式结构拆卸方案,可以用于拆卸竖直方向存在遮挡、操作空间狭窄的辐照监督管。
31.2)可以进行粗定位和精定位。
32.3)可以自动实现竖直运动和旋转运动两个动作。
33.4)自动化程度高、定位精度高,操作简单、人力需求少、对结构加工装配要求低。
附图说明
34.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本技术的一部分,并不构成对本发明实施例的限定。
35.图1是辐照监督管安装示意图(a)。
36.图2是辐照监督管安装示意图(b)。
37.图3是辐照监督管安装示意图(c)。
38.图4是压紧轴上部端面示意图。
39.图5是悬臂式辐照监督管脱扣装置总图。
40.图6是脱扣组件示意图。
41.图7是堆上定位装置示意图。
42.图8是连接杆组件示意图。
43.图9是配重组件示意图。
44.图10是推力组件侧视图。
45.图11是推力组件俯视图。
46.图12是旋转组件示意图。
47.图13是旋转组件(不包括盖板)示意图。
48.图14是导向筒组件示意图。
49.图15是控制系统整体架构图。
50.图16是控制模式面板图。
51.图17是操作流程图。
52.附图标记与对应的零部件名称:
53.辐照监督管100,小轴肩101,大轴肩102,辐照监督管上端部103;
54.固定结构200,上部固定块210,下部固定块220,压紧组件230,压紧固定块231,压紧套筒232,压紧轴233,压紧弹簧234;
55.堆上定位装置300,底座301,吊耳302,x向导轨303,滑台304,连接杆支撑平台305,电机306,数字显示器307,挡块308,y向导轨309,压力容器密封面310,堆内结构件311;
56.连接杆组件400,连接杆401,连接杆操作手柄402;
57.配重组件500,连接接口501,配重块502,调节螺母503;
58.脱扣组件600;
59.推力组件610,滑槽611,水平滑块612,竖直滑块613,支撑架614,直线气缸615,铰链616;
60.旋转组件620,摆动气缸621,连杆机构622,连接板623,底板624,导向杆625,盖板626;
61.导向组件630,导向筒631,导向弹簧632,三角形操作杆633,相机634;
62.水下摄像机700。
具体实施方式
63.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作的原理和特征等做进一步的详细说明,本发明的示意性实施方式及其说明仅用于解
释本发明,并不作为对本发明保护范围的限定。
64.在以下描述中,为了提供对本发明的透彻理解阐述了大量特定细节。然而,对于本领域普通技术人员显而易见的是:不必采用这些特定细节来实行本发明。在其他实例中,为了避免混淆本发明,未具体描述公知的结构、电路、材料或方法。
65.在整个说明书的描述中,对“一个实施例”、“实施例”、“一个示例”或“示例”的提及意味着:结合该实施例或示例描述的特定特征、结构或特性被包含在本发明至少一个实施例中。因此,在整个说明书的各个地方出现的短语“一个实施例”、“实施例”、“一个示例”或“示例”不一定都指同一实施例或示例。此外,可以以任何适当的组合和、或子组合将特定的特征、结构或特性组合在一个或多个实施例或示例中。此外,本领域普通技术人员应当理解,在此提供的示图都是为了说明的目的,并且示图不一定是按比例绘制的。这里使用的术语“和/或”包括一个或多个相关列出的项目的任何和所有组合。
66.下述公开了多种不同的实施所述的主题技术方案的实施方式或实施例。为简化公开内容,下面描述了各特征存在的一个或多个排列的具体实施例,但所举实施例不作为对本说明书的限定,在说明书中随后记载的第一特征与第二特征连接,即可以包括直接联系的实施方式,也可以包括形成附加特征的实施方式,进一步的,也包括采用一个或多个其他介入特征使第一特征和第二特征彼此间接连接或结合,从而第一特征和第二特征可以不直接联系。
67.在本发明的描述中,需要理解的是,术语“前”、“后”、“左”、“右”、“上”、“下”、“竖直”、“水平”、“顶”、“底”、“高”、“低”“内”、“外”、“中心”、“长度”、“周侧”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。
68.在本说明书的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
69.本说明书中使用的术语是考虑到关于本公开的功能而在本领域中当前广泛使用的那些通用术语,但是这些术语可以根据本领域普通技术人员的意图、先例或本领域新技术而变化。此外,特定术语可以由申请人选择,并且在这种情况下,其详细含义将在本公开的详细描述中描述。因此,说明书中使用的术语不应理解为简单的名称,而是基于术语的含义和本公开的总体描述。
70.本说明书中使用了流程图或文字来说明根据本技术的实施例所执行的操作步骤。应当理解的是,本技术实施例中的操作步骤不一定按照记载顺序来精确地执行。相反,根据需要,可以按照倒序或同时处理各种步骤。同时,也可以将其他操作添加到这些过程中,或从这些过程移除某一步或数步操作。
71.针对一些新压水堆堆型中,辐照监督管安装位置正上方存在遮挡物(堆内结构件311),操作空间狭窄的工况,该工况下辐照监督管的拆卸需要脱扣和抓取两个动作。有鉴于此,确有必要提供一种操作简单、悬臂式,可用于对辐照监督管进行水下远程脱扣的装置,以及水下远程抓取和转运及放入高放屏蔽容器的装置。
72.辐照监督管的固定结构及安装、拆卸过程如下:
73.1.固定结构及安装
74.如图1、图2、图3所示,安装过程为,将辐照监督管100上部的小轴肩101(相对大轴肩102外径变小)水平进入固定结构200的上部固定块210,在往下插入下部固定块220(“胀紧”机构),在水平方向上的自由度由上下两个固定块进行水平位置固定(图3);在垂直方向上的自由度由一个压紧组件230进行固定(图1、图2),压紧组件230通过压紧固定块231进行定位和固定。其中,压紧组件230由压紧套筒232、压紧轴233、压紧弹簧234等零件构成,当压紧轴233下压进行预紧,到底后顺时针旋转90
°
角度时(从图1到图2过程),由压紧套筒232上的l形槽卡住,在垂直方向上压紧辐照监督管100组件。压紧轴233上部端面开有三角形的深孔(如图4),用于扳手安装预紧或脱扣装置专用工具拆卸时脱扣。
75.2.拆卸
76.1)操作压紧组件230对辐照监督管100进行脱扣:
77.脱扣装置首先通过定位压紧轴233上部端面三角形的深孔,然后通过三角形操作杆633插入深孔,并以一定压力竖直向下运动进一步压缩压紧组件230的压紧弹簧234,最后三角形操作杆633逆时针旋转,带动压紧轴233旋转90
°
后,抬升三角形操作杆633,压紧轴233在压紧组件230的压紧弹簧234作用下回弹,从而实现对辐照监督管100的脱扣。
78.2)对脱扣后的辐照监督管100进行抓取:
79.抓取工具在完成辐照监督管100脱扣操作后,首先定位辐照监督管100,利用机构夹住辐照监督管100的上部大轴肩102颈部,然后施加向上的力,使辐照监督管100下部脱离下部固定块220(上移距离由大轴肩102与上部固定块210限位),利用机构“抱住”辐照监督管100,水平移动并脱离上部固定块210,最后放入辐照监督管100高放屏蔽容器。
80.实施例
81.本实施例提供一种悬臂式辐照监督管脱扣装置及工作方法,包括堆上定位装置300、连接杆组件400、配重组件500、脱扣组件600、水下摄像机700及控制元件;堆上定位装置300通过连接杆组件400连接脱扣组件600,实现装置的远程定位操作;脱扣组件600提供了竖直运动和旋转运动。本实施例的悬臂式装置可以通过三角形操作杆633实现对辐照监督管100进行脱扣。本装置自动化程度高、定位精度高,对操作环境要求低,可适用于辐照监督管100水下远程脱扣作业。
82.脱扣装置主要包括推力组件610、旋转组件620和导向组件630,导向组件630包括三角形操作杆633,推力组件610包括水平滑块612、竖直滑块613、支撑架614、直线气缸615;直线气缸615推杆与水平滑块612连接,竖直滑块613底部与三角形支撑杆633连接,竖直滑块613与水平滑块612之间通过斜面滑动连接,将直线气缸615水平推力转换为三角形操作杆633竖直向下运动;推力组件610通过支撑架614与旋转组件620连接,水平滑块612斜面侧边线处倒圆角,将旋转组件620旋转力转换为三角形操作杆633轴向转动。
83.1.悬臂式辐照监督管脱扣装置工作原理
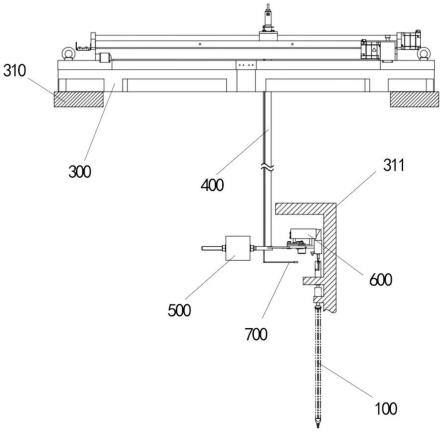
84.悬臂式辐照监督管脱扣装置主要由:堆上定位装置300、连接杆组件400、配重组件500、脱扣组件600(包括推力组件610、旋转组件620、导向组件630、三角形操作杆633等)、水下摄像机700及控制元件组成,如图5、图6所示。
85.堆上定位装置300通过连接杆组件400连接脱扣组件600,并通过其实现脱扣组件600水平x、y方向的定位运动。
86.脱扣组件600通过推力组件610实现三角形操作杆633向下的运动和克服压缩压紧
组件230的压紧弹簧234的弹力;旋转组件620为三角形操作杆633提供逆时针旋转90
°
的运动;导向组件630为三角形操作杆633提供导向,同时导向组件640装有相机635,用于定位压紧轴233上部端面三角形深孔。
87.配重组件500用于悬臂式脱扣组件600的平衡。
88.水下摄像机700用于监视机构动作执行情况,水下摄像机700正对脱扣组件600,且与控制系统信号连接。
89.2.结构构成描述
90.悬臂式辐照监督管脱扣装置的主体结构如图5、图6所示。
91.1)堆上定位装置
92.堆上定位装置300由底座301、吊耳302、x向导轨303、滑台304、连接杆支撑平台305、电机306、数字显示器307、挡块308、y向导轨309等构成,如图7所示。堆上定位装置300坐在压力容器密封面310上,通过定位键实现严格的安装要求。吊耳302安装在底座301上部,x向导轨303安装在底座301下部,滑台304安装在x向导轨303上,y向导轨309安装在滑台304上,连接杆支撑平台305安装在y向导轨309上,连接杆401顶端连接在连接杆支撑平台305上,x向导轨303和y向导轨309配置电机306和挡块308,数字显示器307用于显示x向和y向位移。
93.底座301:整体承力结构件;
94.吊耳302:设有多个,为吊车转运提供受力点;
95.x向导轨303:通过螺栓安装在底座301上,为滑台304提供x向位移运动;
96.滑台304:安装在两根x向导轨303上,其上设y向导轨309,为连接杆支撑平台305提供y向位移运动;
97.连接杆支撑平台305:支撑连接杆组件400;
98.数字显示器307:显示连接杆的x、y方向的位移;
99.挡块308:保护作用;
100.y向导轨309:为连接杆支撑平台305提供y向位移运动。
101.2)连接杆组件
102.连接杆组件400由连接杆401、连接杆操作手柄402组成,如图8所示。
103.连接杆401:起支撑作用;连接杆401通过连接杆操作手柄402安装在连接杆支撑平台305上。
104.连接杆操作手柄402:在连接杆组件400与堆上定位装置300安装过程中,用于调整连接杆组件400相对堆上定位装置300的角度位置,确保相对位置的一致性。
105.3)配重组件
106.配重组件500由连接接口501、配重块502、调节螺母503构成,如图9所示。配重块502通过连接接口501安装在连接杆组件400的连接杆401底部,且配重块502与脱扣组件600位于连接杆401相对两侧,配重块502两侧通过调节螺母503调整水平配重位置。
107.连接接口501:用于和连接杆401底部连接;
108.配重块502:配重作用;
109.调节螺母503:用于调节配重块503相对连接杆401的位置,从而实现与脱扣组件600的力学平衡。
110.4)脱扣组件
111.脱扣组件600的主体结构如图6所示。
112.①
推力组件
113.推力组件610由滑槽611、水平滑块612、竖直滑块613、支撑架614、直线气缸615、铰链616、支撑架617等构成,如图10、图11所示。推力组件610实现三角形操作杆633向下的运动和克服压缩压紧组件230压紧弹簧234弹力,以及传递旋转运动。直线气缸615主体安装在滑槽611内,水平滑块612在滑槽611内滑动连接,直线气缸615推杆与水平滑块612通过铰链616连接,支撑架614顶部与滑槽611底部连接,支撑架614底部连接在旋转组件620的连接板623上。
114.滑槽611:起支承作用;
115.水平滑块612和竖直滑块613:水平滑块612和竖直滑块613采用大角度楔形滑动,以减小水平滑块612的水平位移(操作空间小)。水平滑块612半侧进行圆角(一定参数),当旋转组件带动推力组件旋转运动时,保证竖直滑块能进行旋转90
°
;竖直滑块613受到推力后,通过导向组件630推动三角形操作杆633克服压紧组件230压紧弹簧234弹力;
116.支撑架614:用于将滑槽611连接在旋转组件620上,实现驱动三角形操作杆633的转动;
117.直线气缸615和铰链616:直线气缸615的推杆与水平滑块612之间采用铰链616连接,铰链616用于保证推杆与水平滑块612之间存在的z向跳动。
118.由于操作空间限制,克服竖直方向(z向)压紧组件230压紧弹簧234弹力,不能通过在竖直方向设置的执行机构进行操作,因此选择在侧面操作。
119.推力输出的执行机构优选直线气缸615(水下辐射环境,电机可能受辐照影响、液压缸存在漏油污染情况)。
120.②
旋转组件
121.旋转组件620由摆动气缸621、连杆机构622、连接板623、底板624、导向杆625、盖板626等构成,如图12、图13所示。摆动气缸621主体安装在底板624上,导向杆625竖直安装在底板624上,连接板623上开设有弧形孔,导向杆625位于弧形孔中,盖板626安装在导向杆625顶端且位于连接板623上方,摆动气缸621输出轴通过连杆机构622与连接板623侧边连接。旋转组件620的底板624连接在连接杆401底端,连接杆401顶端连接在堆上定位装置300上。
122.摆动气缸621:由于操作空间限制,三角形操作杆633的旋转运动由侧面的旋转执行机构提供。旋转运动输出的执行机构优选摆动气缸621(水下辐射环境,电机可能受辐照影响、液压缸存在漏油污染情况);
123.连杆机构622:连杆机构622连接摆动气缸621的输出杆和连接板623,用于传递摆动气缸621的旋转运动,通过导向杆625和连接板623圆弧形孔实现连接板623的旋转,从而带动推力组件610、导向组件630和三角形操作杆633旋转;
124.连接板623和盖板626:连接板623的一端与推力组件610的支撑架614刚性连接,另一端开有多组圆弧形孔,通过导向杆625、盖板626、螺帽等与底板624连接;
125.底板624:底板624与连接杆401刚性连接,并用于安装和支承摆动气缸621及其他零部件;
126.导向杆625:导向杆625与底板624螺纹连接,用于连接板623旋转导向。
127.③
导向组件
128.导向组件630由导向筒631、导向弹簧632、三角形操作杆633、相机634等构成,如图14所示。导向筒631连接在旋转组件620的连接板623上,三角形操作杆633限位于导向筒631中竖直滑动,导向弹簧632用于提供三角形操作杆633向上的恢复力,相机634安装在导向筒631上且正对三角形操作杆633底端。
129.导向筒631:用于三角形操作杆633的z向运动导向;
130.导向弹簧632:为三角形操作杆633回弹提供力;
131.三角形操作杆633:竖直滑块613与三角形操作杆633固定连接,通过滑块机构将z轴运动和绕z轴旋转运动传递给三角形操作杆633;
132.相机634:用于定位压紧轴233上部端面三角形孔位置。
133.3.控制系统描述
134.电气控制系统主要功能是:控制堆上定位装置300十字滑台的运动及其逻辑过程状态;控制直线气缸615和摆动气缸621的执行动作;提供系统保护功能。
135.控制系统整体架构如图15所示,控制器件通过工业以太网连接。
136.1)控制系统原理
137.①
粗定位
138.在定位压紧轴233上部端面时,水下摄像机700监视压紧轴233位置,通过硬盘录像机和显示器提供实时视频图像给操作人员,操作人员手动控制操作面板,通过可编程逻辑控制器(plc)控制堆上定位装置300沿x或y方向移动,从而改变下部脱扣组件600的位置,使其靠近压紧轴233上部端面三角形孔。
139.堆上定位装置300的数字显示器307实时显示x、y方向的位移,堆上定位装置300导轨端部的挡块308起位移量超差保护。
140.②
精定位
141.经过粗定位后,压紧轴233上方的相机634拍摄压紧轴233上部端面三角形孔图片,这些图片经过图像处理器处理后,通过相机634相对三角形操作杆633空间位置解析,计算出三角形操作杆633相对三角形孔位移量。该位移量通过操作面板自动输入plc,从而驱动堆上定位装置300的连接杆支撑平台305的水平位移。
142.三角形操作杆633端面和压紧轴233端面的z向距离为恒定值,由机械结构确定。
143.③
气缸控制
144.精定位后,操作人员通过操作面板和plc控制直线气缸615的电磁开关阀开启,实现三角形操作杆633z向竖直向下运动。水下摄像机700监视到位情况。
145.三角形操作杆633竖直向下后,操作人员通过操作面板和plc控制摆动气缸621的电磁开关阀开启,实现三角形操作杆633绕z轴旋转运动。水下摄像机700监视到位情况。
146.2)控制模式
147.x、y方向的位移控制模式分为手动控制和自动控制两种模式。
148.手动控制模式:如图16所示,通过操作面板上的按钮分别控制堆上定位装置300x方向和y方向的点动。该模式主要用于粗定位。
149.自动控制模式:如图16所示,
①
根据手动输入x、y运动位移量,启动后堆上定位装
置300自动执行运动;
②
根据图像处理器处理结果,读取到的x、y运动位移量,启动后堆上定位装置300自动执行运动,该自动模式主要用于精定位。
150.3)操作流程
151.操作流程运行程序如图17所示。实施如下步骤:
152.1)安装堆上定位装置300;
153.2)安装连接杆组件400及下部由推力组件610、旋转组件620和导向组件630组成的脱扣组件600;
154.3)调节连接杆操作手柄402进行方向粗定位;
155.4)通过水下摄像机700进行位置粗定位;
156.5)启动相机634并解析位移量;
157.6)读取位移量并进行位置精定位;
158.7)开启直线气缸615电磁开关;
159.8)水下摄像机700监视到位情况;
160.9)开启摆动气缸621电磁开关;
161.10)水下摄像机700监视到位情况;
162.11)完成脱扣动作;
163.12)依次关闭直线气缸615和摆动气缸621的电磁开关;
164.13)脱扣装置退出。
165.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的较佳实施方式,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。