1.本发明属于移动机器人技术领域,具体涉及一种多足的桁架式爬行机器人。
背景技术:
2.爬行机器人是移动机器人的一种,也是当前机器人领域的一个研究热点。爬行机器人按仿生学角度来分,可分为螳螂式爬行机器人、蜘蛛式爬行机器人、蛇形机器人、尺蠖式爬行机器人等;按驱动方式来分可分为气动爬行机器人、电动爬行机器人和液压驱动爬行机器人等;按工作空间来分可分为管道爬行机器人、壁面爬行机器人和球面爬行机器人等;按功能用途可分为焊弧爬行机器人、检测爬行机器人、清洗爬行机器人、提升爬行机器人、巡线爬行机器人,搬运爬行机器人和玩具爬行机器人等,每一种形式的爬行机器人都有各自的应用特点。
3.当前的搬运机器人主要有轮式搬运爬行机器人、履带式搬运爬行机器人和足式搬运爬行机器人,轮式搬运爬行机器人的障碍通过能力比较差,对搬运路径有很高的要求;履带式搬运爬行机器人有较好的通过性,但其结构复杂,维护困难;相比之下,足式搬运爬行机器人具有好的障碍通过能力,但当前的足式搬运爬行机器人大多是通过设计多关节多驱动的足来满足运动要求,其结构以及驱动控制系统过于复杂,对于机器人的维护提出了很高的要求。
4.中国专利文献cn101716961b公开了一种履腿结合地面机器人,包括多履带车体,车体单侧各设有两个车轮,车体的端部设有横臂,横臂的端部分别设有摆臂轮,车体端部的摆臂轮与其相配的电机连接,多条履带分别套接在摆臂轮与车轮之间以及两车轮之间,车体端部的横臂上设有支杆,支杆形成地面移动机器人的足腿,支杆与距离支杆最近的电机相连。该机器人平时足腿收回,贴在前后横臂内侧,机器人以履带方式运动,碰到履带难以翻越的障碍,可以伸出足腿,以爬行方式运动,增强了爬坡能力;该发明利用了多履带结构,增加由支杆构成的足腿,相比标准腿结构简单的多,且爬行动作简单、机构易于实现,因此有效的减少了结构的复杂性。
5.现有的搬运爬行机器人难以广泛应用的原因主要体现在以下几个方面:第一是大负载能力,对于搬运爬行机器人来说,负载能力会是衡量其性能的重要指标之一,也是未来研究的主要方向,强度性能优良的桁架式结构对于提高爬行机器人的负载能力尤为重要;第二是搬运爬行机器人的可靠性,一般来说,爬行机器人的零件越多,结构越复杂,尤其是多关节多驱动的情况下其可靠性会快速下降,简单有效的爬行机器人结构在工作时出现概率的故障率会大大降低从而提高其可靠性;第三是爬行机器人的驱动控制系统的简化,简单的驱动控制系统对于爬行机器人的使用寿命及维护具有重要的影响,这就要求爬行机器人具有更少的自由度从而减少驱动器的数量;第四是爬行机器人的障碍通过能力,通过足式设计可以大大提高爬行机器人的障碍通过能力以及爬坡能力。
技术实现要素:
6.针对现有技术的缺陷,本发明提供了一种可靠性高的爬行机器人。
7.为了实现上述目的,本发明提供了一种爬行机器人,包括桁架主体和负载平台,其中桁架主体包括:
8.用于支撑负载平台的支撑桁架;
9.驱动用的曲轴;
10.左右对称的两组运动支链;
11.用于分别驱动两组运动支链的两组传动支链;
12.支撑桁架包括左右对称的两个支撑杆,两个支撑杆之间通过前后两个连接杆固定连接,支撑杆具有前连接部和后连接部;
13.曲轴的两端转动设置于两个连接杆上;
14.运动支链包括前足、后足和连动杆;
15.其中前足包括前足部、前横杆和前纵杆,前横杆与前连接部相铰接,前纵杆与前横杆相连接,后足包括后足部和后横杆,后横杆与后连接部相铰接,连动杆分别与前横杆、后横杆相铰接,并且连动杆与支撑杆之间互相平行,从而使前足部与后足部具有相同的步幅;
16.传动支链包括第一连接座、第二连接座和用于控制步长的行程杆;
17.其中第一连接座与第二连接座分别铰接在曲轴的第一连杆颈与前纵杆上,行程杆的行程大小是可调的,行程杆的一端固定在第一连接座上,行程杆的另一端与第二连接座之间配合连接;
18.曲轴的转动,能够推动前足运动,利用连动杆带动后足同步运动,通过调节两组传动支链中行程杆的相对行程大小,进行爬行机器人的直线爬行、左转和右转。
19.在本发明的上述技术方案中,爬行机器人采用桁架式结构,桁架主体所具有的构件数量较少,同时采用转动副和移动副等可靠性高的运动副来进行构件间的连接,使得整个爬行机器人系统可靠性较高;同时该爬行机器人具有良好的搬运负载能力,以适应更多的标的物搬运。
20.作为本发明的另一种具体实施方式,两个支撑杆和两个连接杆首尾相连形成为矩形。
21.作为本发明的另一种具体实施方式,曲轴形成为2ru驱动支链,曲轴的一端通过转动副与其中一个连接杆连接,曲轴的另一端通过万向铰与另外一个连接杆连接。
22.优选的,两个支撑杆关于曲轴的回转中心线对称。
23.作为本发明的另一种具体实施方式,第一连接座为圆柱副连接座,其具有转动副和移动副,第一连接座包括套体和沿套体的径向向外延伸的座体,套体套设于曲轴的第一连杆颈,行程杆设置于座体上,其中行程杆与曲轴的第一连杆颈相垂直。
24.作为本发明的另一种具体实施方式,第二连接座为万向铰连接座,其具有互相垂直的转动副和转动副,第二连接座包括互相铰接的两个t形连接件,其中一个t形连接件的自由端与前纵杆相铰接,行程杆的另一端滑动连接在另外一个t形连接件的自由端。
25.作为本发明的另一种具体实施方式,前横杆和前纵杆之间相垂直。
26.作为本发明的另一种具体实施方式,运动支链还包括用于左右步态调整的中足和随动杆,中足包括中足部、中横杆和中竖杆,随动杆的一端铰接在曲轴的第二连杆颈上,中
竖杆的一端铰接在支撑杆上,中竖杆的另一端与随动杆的另一端相铰接,中横杆与中竖杆之间固定连接。
27.本方案中,采用中足的设计可以在进一步的提高所述爬行机器人的负载能力同时,用于爬行机器人的左、右步态的调整。
28.作为本发明的另一种具体实施方式,曲轴的第一连杆颈和第二连杆颈的相位角不同。
29.作为本发明的另一种具体实施方式,支撑桁架上设有用于驱动曲轴运动的伺服电机。
30.作为本发明的另一种具体实施方式,通过调节两组传动支链中行程杆的相对行程大小为相同,进行爬行机器人的直线爬行,并根据行程杆的行程大小调节直线爬行的速度;通过调节两组传动支链中行程杆的相对行程大小为不相同,进行爬行机器人的左转和右转,并根据两个行程杆的行程大小的差值调节左转和右转的速度。
31.本发明具备以下有益效果:
32.本发明中采用转动副和移动副等可靠性高的运动副来进行构件间的连接,使得整个爬行机器人系统可靠性较高,同时便于轻量化设计,并且具备强度高的优点;
33.同时本发明自由度少,仅需完成一个转动副和两个移动副的控制即可实现对爬行机器人的控制,驱动器选择较多,且易保证传动的效率。
34.同时本发明采用了足式设计,该设计即可保证爬行机器人有较好的障碍通过性和爬坡能力,也降低了对爬行路径的要求。
35.下面结合附图对本发明作进一步的详细说明。
附图说明
36.图1是本发明的结构示意图;
37.图2是本发明支撑桁架的结构示意图;
38.图3是本发明曲轴与支撑桁架的安装示意图;
39.图4是本发明前足的结构示意图;
40.图5是本发明前足与传动支链的连接示意图;
41.图6是本发明传动支链的分解示意图;
42.图7是本发明后足的结构示意图;
43.图8是本发明中足的结构示意图;
44.图9是本发明中足与随动杆的连接示意图。
具体实施方式
45.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
46.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不限于下面公开的具体实施例的限制。
47.实施例1
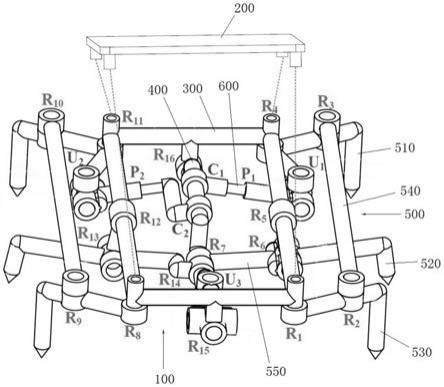
48.本实施例提供了一种爬行机器人,具体是一种用于进行运载的爬行机器人,如图1-9所示,其包括桁架主体100和负载平台200,桁架主体100包括支撑桁架300、曲轴400、两组运动支链500和两组传动支链600。
49.其中支撑桁架300用于支撑负载平台200,曲轴400用于提供驱动源,两组运动支链500对称位于支撑桁架300的左右两侧,两组传动支链600用于分别驱动两组运动支链500进行运动,以实现直行、向左和向右;
50.具体的,支撑桁架300包括左右对称的两个支撑杆310和前后对称的两个连接杆320,两个支撑杆310之间通过前后两个连接杆320固定连接,优选的,两个支撑杆310和两个连接杆320首尾相连形成为矩形;其中支撑杆310具有前连接部311和后连接部312,具体为支撑杆310的前端为前连接部311,支撑杆310的后端为后连接部312。
51.曲轴400的两端转动设置于两个连接杆320上,具体为曲轴400的两端设置于两个连接杆320的中部,即为两个支撑杆310关于曲轴400的回转中心线对称,以便于驱动。
52.本实施例中的曲轴400形成为2ru驱动支链,曲轴400的一端通过转动副与其中一个连接杆320连接,曲轴400的另一端通过万向铰 转动副与另外一个连接杆320连接,具体的,本实施例中的曲轴400具有第一连杆颈410和第二连杆颈420,并且曲轴400的第一连杆颈410和第二连杆颈420的相位角不同。
53.下面以右侧的运动支链500为例进行介绍其结构,运动支链500包括前足510、中足520、后足530、连动杆540和随动杆550;
54.前足510包括前足部511、前横杆512和前纵杆513,前横杆512与前连接部311相铰接,铰接点为r4,前纵杆513与前横杆512相连接,传动支链600作用于前纵杆513并能够使得前纵杆513、前横杆512围绕铰接点r4进行转动,以实现前足部511的运动。
55.优选的,前横杆512和前纵杆513之间相垂直。
56.后足530包括后足部531和后横杆532,后横杆532与后连接部312相铰接,铰接点为r1,连动杆540分别与前横杆512、后横杆532相铰接,铰接点分别为r3、r4,并且连动杆540与支撑杆310之间互相平行,从而使前足部511与后足部531具有相同的步幅;
57.其中转动副r1、r2、r3、r4形成了平面单自由度的平行四边形机构,此处爬行机器人前足作为主动杆驱动后足行进,由于平行四边形机构的固有特性,前足与后足在行进过程中具有相同的步幅,其步幅的大小取决于前足的实际尺寸。
58.中足520包括中足部521、中横杆522和中竖杆523,随动杆550的一端铰接在曲轴400的第二连杆颈420上,中竖杆523的一端铰接在支撑杆310上,中竖杆523的另一端与随动杆550的另一端相铰接,中横杆522与中竖杆523之间固定连接。
59.本实施例的中足520和随动杆550用于左右步态调整,采用中足520的设计可以在进一步的提高所述爬行机器人的负载能力同时,用于爬行机器人的左、右步态的调整。
60.下面以右侧的传动支链600为例介绍其结构,传动支链600包括第一连接座610、第二连接座620和用于控制步长的行程杆630,第一连接座610与第二连接座620分别铰接在曲轴400的第一连杆颈410与前纵杆513上,行程杆630的行程大小是可调的,行程杆630的一端固定在第一连接座610上,行程杆630的另一端滑动连接在第二连接座620上;
61.具体的,第一连接座610为圆柱副连接座,其具有转动副和移动副,第一连接座610
包括套体611和沿套体611的径向向外延伸的座体612,套体611套设于曲轴400的第一连杆颈410,行程杆630设置于座体612上,其中行程杆630与曲轴400的第一连杆颈410相垂直。
62.具体的,第二连接座620为万向铰连接座,其具有互相垂直的转动副和转动副,第二连接座620包括互相铰接的两个t形连接件,两个t形连接件形状不完全相同,其中一个t形连接件621的自由端与前纵杆513相铰接,行程杆630的另一端与另外一个t形连接件622的自由端配合连接,例如滑动配合。
63.本实施例中的位于左侧的传动支链600为了避免干涉,形状稍有不同,参见图1,其原理与位于右侧的传动支链600相同,不再展开介绍。
64.本实施例中曲轴400的转动,能够推动前足510运动,利用连动杆540带动后足530同步运动,通过调节两组传动支链600中行程杆630的相对行程大小,进行爬行机器人的直线爬行、左转和右转。
65.进一步的,通过调节两组传动支链600中行程杆630的相对行程大小为相同,进行爬行机器人的直线爬行,并根据行程杆630的行程大小调节直线爬行的速度;通过调节两组传动支链600中行程杆630的相对行程大小为不相同,进行爬行机器人的左转和右转,并根据两个行程杆630的行程大小的差值调节左转和右转的速度。
66.本实施例中支撑桁架300上设有用于驱动曲轴400运动的伺服电机,通过伺服电机实现曲轴400的转动;同样的,也可以采用伺服电机改变行程杆630的行程大小,在其他实施例中还可以采用人工肌肉等方式进行驱动,这里不再展开介绍。
67.结合图1,本实施例中具体连接方式为:
68.右侧部分:右后足530与支撑桁架300通过转动副r1连接,右后足530与连动杆540通过转动副r2连接,连动杆540与右前足510通过转动副r3连接,右前足510与支撑桁架300通过转动副r4连接,右中足520与支撑桁架300通过转动副r5连接,随动杆550与右中足520通过转动副r6连接,随动杆550与曲轴400的第二连杆颈420通过转动副r7连接,传动支链600与右前足510通过万向铰u1连接,第二连接座620与第一连接座610通过转动副p1(由行程杆630提供)连接,第一连接座610与曲轴400的第一连杆颈410通过圆柱副c1连接。
69.左侧部分:左后足530与支撑桁架300通过转动副r8连接,左后足530与连动杆540通过转动副r9连接,连动杆540与左前足510通过转动副r10连接,左前足510与支撑桁架300通过转动副r11连接,左中足520与支撑桁架300通过转动副r12连接,随动杆550与左中足520通过转动副r13连接,随动杆550与曲轴400的第二连杆颈420通过转动副r14连接,左前足510与传动支链600通过万向铰u2连接,第二连接座620与第一连接座610通过转动副p2(由行程杆630提供)连接,第一连接座610与曲轴400的第一连杆颈410通过圆柱副c2连接。
70.曲轴400:曲轴400的后端与支撑桁架300通过转动副r15、万向铰u3连接,曲轴400的前端与支撑桁架300通过转动副r16连接。
71.负载平台200:负载平台200与支撑桁架300之间刚性连接。
72.本实施例的控制方式如下:
73.1)直线爬行时,要求移动副p1与移动副p2具有相同的行程,此时移动副p1与移动副p2的行程可用于调节爬行机器人前进的速度,当移动副p1与移动副p2的行程较大时,爬行机器人运动较快,当移动副p1与移动副p2的行程较小时,爬行机器人运动较慢;
74.2)左转时,移动副p2的处于小行程状态而移动副p1处于大行程状态,此时移动副
p1与移动副p2的行程差越大,爬行机器人左转速度越快,移动副p1与移动副p2的行程差越小,爬行机器人左转速度越慢;
75.3)右转时,移动副p1的处于小行程状态而移动副p2处于大行程状态,此时移动副p1与移动副p2的行程差越大,爬行机器人右转速度越快,移动副p1与移动副p2的行程差越小,爬行机器人右转速度越慢。
76.本实施例的爬行机器人采用桁架式结构,桁架主体100所具有的构件数量较少,同时采用转动副和移动副等可靠性高的运动副来进行构件间的连接,使得整个爬行机器人系统可靠性较高;同时该爬行机器人具有良好的搬运负载能力,以适应更多的标的物搬运。
77.虽然本发明以较佳实施例揭露如上,但并非用以限定本发明实施的范围。任何本领域的普通技术人员,在不脱离本发明的发明范围内,当可作些许的改进,即凡是依照本发明所做的同等改进,应为本发明的范围所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。